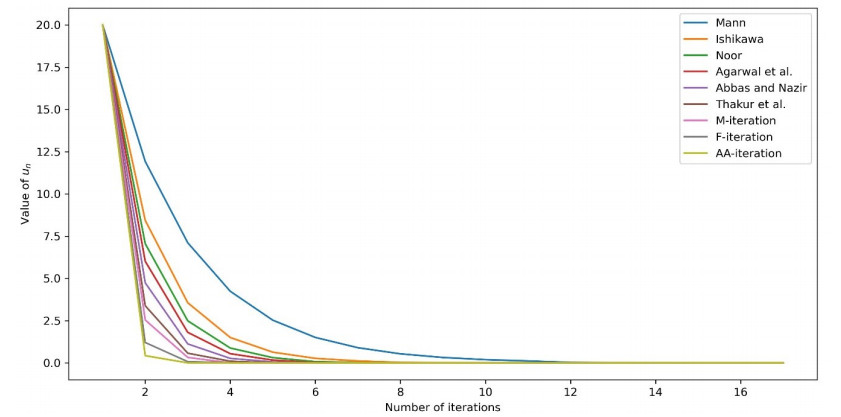
We explored the $ AA $-iterative algorithm within the hyperbolic spaces (HSs), aiming to unveil a stability outcome for contraction maps and convergence outcomes for generalized $ (\alpha, \beta) $-nonexpansive ($ G\alpha \beta N $) maps in such spaces. Through this algorithm, we derived compelling outcomes for both strong and $ \Delta $-convergence and weak $ w^2 $-stability. Furthermore, we provided an illustrative example of $ G\alpha \beta N $ maps and conducted a comparative analysis of convergence rates against alternative iterative methods. Additionally, we demonstrated the practical relevance of our findings by applying them to solve the linear Fredholm integral equations (FIEs) and nonlinear Fredholm-Hammerstein integral equations (FHIEs) on time scales.
Citation: Aynur Şahin, Zeynep Kalkan. The $ AA $-iterative algorithm in hyperbolic spaces with applications to integral equations on time scales[J]. AIMS Mathematics, 2024, 9(9): 24480-24506. doi: 10.3934/math.20241192
We explored the $ AA $-iterative algorithm within the hyperbolic spaces (HSs), aiming to unveil a stability outcome for contraction maps and convergence outcomes for generalized $ (\alpha, \beta) $-nonexpansive ($ G\alpha \beta N $) maps in such spaces. Through this algorithm, we derived compelling outcomes for both strong and $ \Delta $-convergence and weak $ w^2 $-stability. Furthermore, we provided an illustrative example of $ G\alpha \beta N $ maps and conducted a comparative analysis of convergence rates against alternative iterative methods. Additionally, we demonstrated the practical relevance of our findings by applying them to solve the linear Fredholm integral equations (FIEs) and nonlinear Fredholm-Hammerstein integral equations (FHIEs) on time scales.

| [1] | K. Arrow, Social coice and individual values, New Haven: Yale University Press, 2012. http://dx.doi.org/10.12987/9780300186987 |
| [2] |
A. Turing, On computable numbers, with an application to the entscheidungsproblem, Proc. Lond. Math. Soc., 42 (1937), 230–265. http://dx.doi.org/10.1112/plms/s2-42.1.230 doi: 10.1112/plms/s2-42.1.230

|
| [3] |
E. Witten, Dynamical breaking of supersymmetry, Nucl. Phys. B, 188 (1981), 513–554. http://dx.doi.org/10.1016/0550-3213(81)90006-7 doi: 10.1016/0550-3213(81)90006-7
|
| [4] |
B. Zitova, J. Flusser, Image registration methods: a survey, Image Vision Comput., 21 (2003), 977–1000. http://dx.doi.org/10.1016/S0262-8856(03)00137-9 doi: 10.1016/S0262-8856(03)00137-9
|
| [5] |
J. Nash, Equilibrium points in $n$-person games, PNAS, 36 (1950), 48–49. http://dx.doi.org/10.1073/pnas.36.1.48 doi: 10.1073/pnas.36.1.48
|
| [6] |
F. Black, M. Scholes, The pricing of options and corporate liabilities, J. Polit. Econ., 81 (1973), 637–654. http://dx.doi.org/10.1086/260062 doi: 10.1086/260062
|
| [7] | S. Wasserman, K. Faust, Social network analysis: methods and applications, Cambridge: Cambridge University Press, 1994. http://dx.doi.org/10.1017/CBO9780511815478 |
| [8] | J. Hutchinson, Fractals and self-similarity, Indiana U. Math. J., 30 (1981), 713–747. |
| [9] |
M. Barnsley, A. Vince, The chaos game on a general iterated function system, Ergod. Theor. Dyn. Syst., 31 (2011), 1073–1079. http://dx.doi.org/10.1017/S0143385710000428 doi: 10.1017/S0143385710000428
|
| [10] |
L. Brouwer, Über abbildung von mannigfaltigkeiten, Math. Ann., 71 (1911), 97–115. http://dx.doi.org/10.1007/BF01456931 doi: 10.1007/BF01456931
|
| [11] | J. Schauder, Der fixpunktsatz in funktionalraümen, Stud. Math., 2 (1930), 171–180. |
| [12] | E. Picard, Mémoire sur la théorie des équations aux dérivés partielles et la méthode des approximations successives, J. Math. Pure. Appl., 6 (1890), 145–210. |
| [13] | S. Banach, Sur les opérations dans les ensembles abstraites et leurs applications, Fund. Math., 3 (1922), 133–181. |
| [14] |
W. Mann, Mean value methods in iteration, Proc. Amer. Math. Soc., 4 (1953), 506–510. http://dx.doi.org/10.2307/2032162 doi: 10.2307/2032162
|
| [15] |
S. Ishikawa, Fixed points by a new iteration method, Proc. Amer. Math. Soc., 44 (1974), 147–150. http://dx.doi.org/10.1090/S0002-9939-1974-0336469-5 doi: 10.1090/S0002-9939-1974-0336469-5
|
| [16] |
M. Noor, New approximation schemes for general variational inequalities, J. Math. Anal. Appl., 251 (2000), 217–229. http://dx.doi.org/10.1006/jmaa.2000.7042 doi: 10.1006/jmaa.2000.7042
|
| [17] | R. Agarwal, D. O'Regan, D. Sahu, Iterative construction of fixed points of nearly asymptotically nonexpansive mappings, J. Nonlinear Convex Anal., 8 (2007), 61–79. |
| [18] | M. Abbas, T. Nazir, A new faster iteration process applied to constrained minimization and feasibility problems, Mat. Vesnik, 66 (2014), 223–234. |
| [19] |
B. Thakur, D. Thakur, M. Postolache, A new iteration scheme for approximating fixed points of nonexpansive mappings, Filomat, 30 (2016), 2711–2720. http://dx.doi.org/10.2298/FIL1610711T doi: 10.2298/FIL1610711T
|
| [20] |
K. Ullah, M. Arshad, Numerical reckoning fixed points for Suzuki's generalized nonexpansive mappings via new iteration process, Filomat, 32 (2018), 187–196. http://dx.doi.org/10.2298/FIL1801187U doi: 10.2298/FIL1801187U
|
| [21] | J. Ali, F. Ali, A new iterative scheme to approximating fixed points and the solution of a delay differential equation, J. Nonlinear Convex Anal., 21 (2020), 2151–2163. |
| [22] |
M. Abbas, M. Asghar, M. De la Sen, Approximation of the solution of delay fractional differential equation using AA-iterative scheme, Mathematics, 10 (2022), 273. http://dx.doi.org/10.3390/math10020273 doi: 10.3390/math10020273
|
| [23] |
I. Beg, M. Abbas, M. Asghar, Convergence of $AA$-iterative algorithm for generalized $\alpha$-nonexpansive mappings with an application, Mathematics, 10 (2022), 4375. http://dx.doi.org/10.3390/math10224375 doi: 10.3390/math10224375
|
| [24] |
M. Asghar, M. Abbas, C. Eyni, M. Omaba, Iterative approximation of fixed points of generalized $\alpha_m$-nonexpansive mappings in modular spaces, AIMS Mathematics, 8 (2023), 26922–26944. http://dx.doi.org/10.3934/math.20231378 doi: 10.3934/math.20231378
|
| [25] |
C. Suanoom, A. Gebrie, T. Grace, The convergence of $AA$-iterative algorithm for generalized $AK$-$\alpha$-nonexpansive mappings in Banach spaces, Science and Technology Asia, 28 (2023), 82–90. http://dx.doi.org/10.14456/scitechasia.2023.47 doi: 10.14456/scitechasia.2023.47
|
| [26] |
M. Asghar, M. Abbas, B. Rouhani, The $AA$-viscosity algorithm for fixed point, generalized equilibrium and variational inclusion problems, Axioms, 13 (2024), 38. http://dx.doi.org/10.3390/axioms13010038 doi: 10.3390/axioms13010038
|
| [27] |
M. Abbas, C. Ciobanescu, M. Asghar, A. Omame, Solution approximation of fractional boundary value problems and convergence analysis using $AA$-iterative scheme, AIMS Mathematics, 9 (2024), 13129–13158. http://dx.doi.org/10.3934/math.2024641 doi: 10.3934/math.2024641
|
| [28] |
U. Kohlenbach, Some logical metatherems with applications in functional analysis, Trans. Amer. Math. Soc., 357 (2005), 89–128. http://dx.doi.org/10.2307/3845213 doi: 10.2307/3845213
|
| [29] |
T. Suzuki, Fixed point theorems and convergence theorems for some generalized nonexpansive mappings, J. Math. Anal. Appl., 340 (2008), 1088–1095. http://dx.doi.org/10.1016/j.jmaa.2007.09.023 doi: 10.1016/j.jmaa.2007.09.023
|
| [30] |
R. Pant, R. Shukla, Approximating fixed points of generalized $\alpha$-nonexpansive mappings in Banach spaces, Numer. Func. Anal. Opt., 38 (2017), 248–266. http://dx.doi.org/10.1080/01630563.2016.1276075 doi: 10.1080/01630563.2016.1276075
|
| [31] |
R. Pant, R. Pandey, Existence and convergence results for a class of nonexpansive type mappings in hyperbolic spaces, Appl. Gen. Topol., 20 (2019), 281–295. http://dx.doi.org/10.4995/agt.2019.11057 doi: 10.4995/agt.2019.11057
|
| [32] |
A. Şahin, Some new results of $M$-iteration process in hyperbolic spaces, Carpathian J. Math., 35 (2019), 221–232. http://dx.doi.org/10.37193/CJM.2019.02.10 doi: 10.37193/CJM.2019.02.10
|
| [33] |
A. Şahin, Some results of the Picard-Krasnoselskii hybrid iterative process, Filomat, 33 (2019), 359–365. http://dx.doi.org/10.2298/FIL1902359S doi: 10.2298/FIL1902359S
|
| [34] |
S. Khatoon, I. Uddin, M. Başarır, A modified proximal point algorithm for a nearly asymptotically quasi-nonexpansive mapping with an application, Comp. Appl. Math., 40 (2021), 250. http://dx.doi.org/10.1007/s40314-021-01646-9 doi: 10.1007/s40314-021-01646-9
|
| [35] |
H. Piri, B. Daraby, S. Rahrovi, M. Ghasemi, Approximating fixed points of generalized $\alpha$-nonexpansive mappings in Banach spaces by new faster iteration process, Numer. Algor., 81 (2019), 1129–1148. http://dx.doi.org/10.1007/s11075-018-0588-x doi: 10.1007/s11075-018-0588-x
|
| [36] |
K. Ullah, J. Ahmad, M. De la Sen, On generalized nonexpansive maps in Banach spaces, Computation, 8 (2020), 61. http://dx.doi.org/10.3390/computation8030061 doi: 10.3390/computation8030061
|
| [37] |
S. Reich, I. Shafrir, Nonexpansive iterations in hyperbolic spaces, Nonlinear Anal.-Theor., 15 (1990), 537–558. http://dx.doi.org/10.1016/0362-546X(90)90058-O doi: 10.1016/0362-546X(90)90058-O
|
| [38] |
W. Takahashi, A convexity in metric space and nonexpansive mappings, Kodai Math. Sem. Rep., 22 (1970), 142–149. http://dx.doi.org/10.2996/kmj/1138846111 doi: 10.2996/kmj/1138846111
|
| [39] | M. Bridson, A. Haefliger, Metric spaces of non-positive curvature, Berlin: Springer, 2013. http://dx.doi.org/10.1007/978-3-662-12494-9 |
| [40] |
A. Khan, H. Fukhar-ud-din, M. Khan, An implicit algorithm for two finite families of nonexpansive maps in hyperbolic spaces, Fixed Point Theory Appl., 2012 (2012), 54. http://dx.doi.org/10.1186/1687-1812-2012-54 doi: 10.1186/1687-1812-2012-54
|
| [41] | L. Leuştean, Nonexpansive iterations in uniformly convex W-hyperbolic spaces, In: Nonlinear analysis and optimization I: nonlinear analysis, Ramat-Gan: American Mathematical Society, 2010,193–209. http://dx.doi.org/10.1090/conm/513/10084 |
| [42] |
T. Lim, Remarks on some fixed point theorems, Proc. Amer. Math. Soc., 60 (1976), 179–182. http://dx.doi.org/10.1090/S0002-9939-1976-0423139-X doi: 10.1090/S0002-9939-1976-0423139-X
|
| [43] | T. Cardinali, P. Rubbioni, A generalization of the Caristi fixed point theorem in metric spaces, Fixed Point Theory, 11 (2010), 3–10. |
| [44] | I. Timiş, On the weak stability of Picard iteration for some contractive type mappings, Ann. Univ. Craiova-Mat., 37 (2010), 106–114. |
| [45] |
S. Hilger, Analysis on measure chains a unified approach to continuous and discrete calculus, Results Math., 18 (1990), 18–56. http://dx.doi.org/10.1007/BF03323153 doi: 10.1007/BF03323153
|
| [46] | M. Bohner, A. Peterson, Dynamic equations on time scales: an introduction with applications, Boston: Birkhauser, 2001. http://dx.doi.org/10.1007/978-1-4612-0201-1 |
| [47] |
G. Guseinov, Integration on time scales, J. Math. Anal. Appl., 285 (2003), 107–127. http://dx.doi.org/10.1016/S0022-247X(03)00361-5 doi: 10.1016/S0022-247X(03)00361-5
|
| [48] |
G. Adomian, A review of the decomposition method in applied mathematics, J. Math. Anal. Appl., 135 (1988), 501–544. http://dx.doi.org/10.1016/0022-247X(88)90170-9 doi: 10.1016/0022-247X(88)90170-9
|
| [49] |
A. Şahin, E. Öztürk, G. Aggarwal, Some fixed-point results for the $KF$-iteration process in hyperbolic metric spaces, Symmetry, 15 (2023), 1360. http://dx.doi.org/10.3390/sym15071360 doi: 10.3390/sym15071360
|
| [50] | H. Senter, W. Dotson, Approximating fixed points of nonexpansive mappings, Proc. Amer. Math. Soc., 44 (1974), 375–380. |
| [51] |
R. Farengo, Y. Lee, P. Guzdar, An electromagnetic integral equation: application to microtearing modes, Phys. Fluids, 26 (1983), 3515–3523. http://dx.doi.org/10.1063/1.864112 doi: 10.1063/1.864112
|
| [52] |
A. Manzhirov, On a method of solving two-dimensional integral equations of axisymmetric contact problems for bodies with complex rheology, J. Appl. Math. Mech., 49 (1985), 777–782. http://dx.doi.org/10.1016/0021-8928(85)90016-4 doi: 10.1016/0021-8928(85)90016-4
|
| [53] |
M. Mirkin, A. Bard, Multidimensional integral equations: part 1. a new approach to solving microelectrode diffusion problems, J. Electroanal. Chem., 323 (1992), 1–27. http://dx.doi.org/10.1016/0022-0728(92)80001-K doi: 10.1016/0022-0728(92)80001-K
|
| [54] |
Z. Kalkan, A. Şahin, A. Aloqaily, N. Mlaiki, Some fixed point and stability results in $b$-metric-like spaces with an application to integral equations on time scales, AIMS Mathematics, 9 (2024), 11335–11351. http://dx.doi.org/10.3934/math.2024556 doi: 10.3934/math.2024556
|
Figures(1) / Tables(3)

Aynur Şahin, Zeynep Kalkan. The $ AA $-iterative algorithm in hyperbolic spaces with applications to integral equations on time scales[J]. AIMS Mathematics, 2024, 9(9): 24480-24506. doi: 10.3934/math.20241192







 DownLoad:
DownLoad: