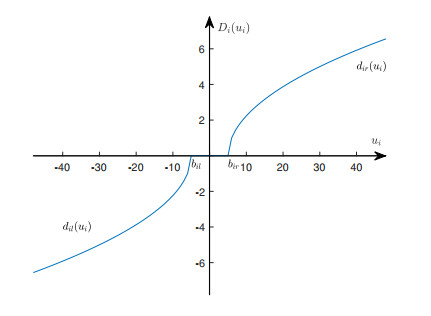
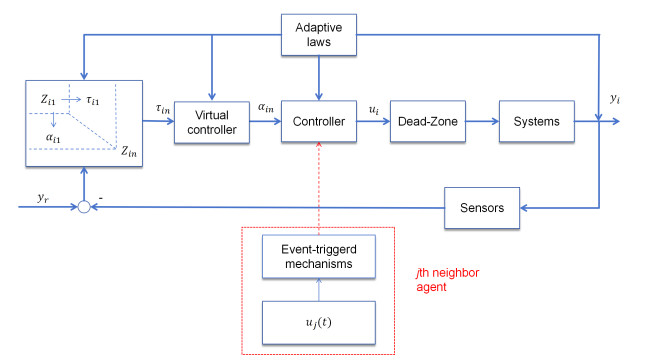
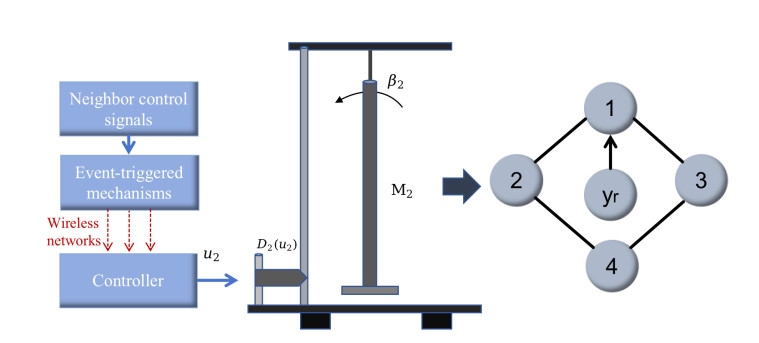
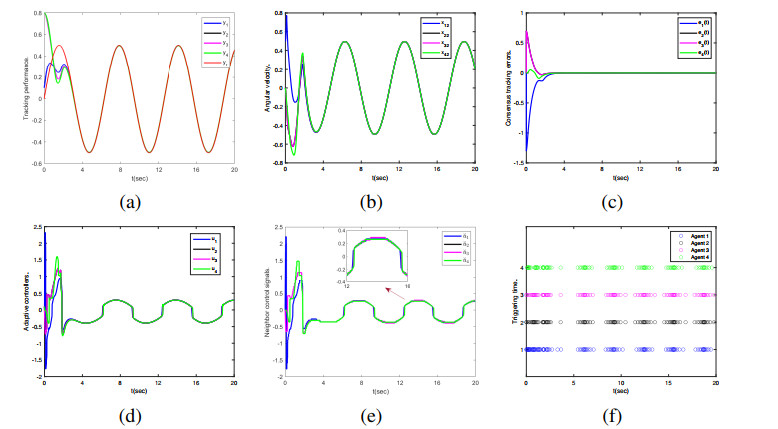
The paper focused on the distributed tracking problem for a specific class of multi-agent systems, characterized by bandwidth constraint and dead zone actuators, where the bandwidth limitations exist in neighbor agents and the dead zone nonlinearity refers to a generalized mathematical model. Initially, a series of event-triggered mechanisms with relative thresholds were established for neighbor agents, ensuring that control signals were transmitted only when necessary. Next, the generalized dead zone models were decomposed into two parts: indefinite terms with control coefficients and disturbance-like terms, resulting in unpredictability and damaging effects. Subsequently, based on the backstepping procedure, final consensus controllers with multiple polynomial compensators were constructed. These controllers offset the coupling coefficients caused by event-triggered mechanisms and dead zone non-smooth. Stability analysis was given to substantiate the theoretical correctness of this method and support the claim of Zeno behavior avoidance. Finally, simulation studies were performed for the feasibility of our proposed methodology.
Citation: Xiaohang Su, Peng Liu, Haoran Jiang, Xinyu Yu. Neighbor event-triggered adaptive distributed control for multiagent systems with dead-zone inputs[J]. AIMS Mathematics, 2024, 9(4): 10031-10049. doi: 10.3934/math.2024491
The paper focused on the distributed tracking problem for a specific class of multi-agent systems, characterized by bandwidth constraint and dead zone actuators, where the bandwidth limitations exist in neighbor agents and the dead zone nonlinearity refers to a generalized mathematical model. Initially, a series of event-triggered mechanisms with relative thresholds were established for neighbor agents, ensuring that control signals were transmitted only when necessary. Next, the generalized dead zone models were decomposed into two parts: indefinite terms with control coefficients and disturbance-like terms, resulting in unpredictability and damaging effects. Subsequently, based on the backstepping procedure, final consensus controllers with multiple polynomial compensators were constructed. These controllers offset the coupling coefficients caused by event-triggered mechanisms and dead zone non-smooth. Stability analysis was given to substantiate the theoretical correctness of this method and support the claim of Zeno behavior avoidance. Finally, simulation studies were performed for the feasibility of our proposed methodology.

| [1] |
R. Postoyan, P. Tabuada, D. Nesic, A. Anta, A framework for the event-triggered stabilization of nonlinear systems, IEEE T. AUTOMAT. CONTR., 60 (2015), 982–996. https://doi.org/10.1109/TAC.2014.2363603 doi: 10.1109/TAC.2014.2363603

|
| [2] |
S. Liu, B. Niu, G. Zong, X. Zhao, N. Xu, Data-driven-based event-triggered optimal control of unknown nonlinear systems with input constraints, NONLINEAR DYNAM., 109 (2022), 891–909. https://doi.org/10.1007/s11071-022-07459-7 doi: 10.1007/s11071-022-07459-7
|
| [3] |
X. Han, X. Zhao, T. Sun, Y. Wu, N. Xu, G. Zong, Event-triggered optimal control for discrete-time switched nonlinear systems with constrained control input, IEEE T. SYST. MAN CY.-S., 51 (2021), 7850–7859. https://doi.org/10.1109/TSMC.2020.2987136 doi: 10.1109/TSMC.2020.2987136
|
| [4] |
L. Xing, C. Wen, Z. Liu, H. Su, J. Cai, Adaptive compensation for actuator failures with event-triggered input, AUTOMATICA, 85 (2017), 129–136. https://doi.org/10.1016/j.automatica.2017.07.061 doi: 10.1016/j.automatica.2017.07.061
|
| [5] | J. Zhang, D. Yang, H. Zhang, Y. Wang, B. Zhou, Dynamic event-based tracking control of boiler turbine systems with guaranteed performance, IEEE T. AUTOM. SCI. ENG., (2023), to be published. https://doi.org/10.1109/TASE.2023.3294187 |
| [6] |
L. Cao, H. Li, G. Dong, R. Lu, Event-triggered control for multiagent systems with sensor faults and input saturation, IEEE T. SYST. MAN CY.-S., 51 (2021), 3855–3866. https://doi.org/10.1109/TSMC.2019.2938216 doi: 10.1109/TSMC.2019.2938216
|
| [7] |
J. Huang, W. Wang, C. Wen, G. Li, Adaptive event-triggered control of nonlinear systems with controller and parameter estimator triggering, IEEE T. AUTOMAT. CONTR., 65 (2020), 318–324. https://doi.org/10.1109/TAC.2019.2912517 doi: 10.1109/TAC.2019.2912517
|
| [8] |
H. Wang, K. Xu, J. Qiu, Event-triggered adaptive fuzzy fixed-time tracking control for a class of nonstrict-feedback nonlinear systems, IEEE T. CIRCUITS-I, 68 (2021), 3058–3068. https://doi.org/10.1109/TCSI.2021.3073024 doi: 10.1109/TCSI.2021.3073024
|
| [9] |
J. Zhang, H. Zhang, S. Sun, Y. Cai, Adaptive time-varying formation tracking control for multiagent systems with nonzero leader input by intermittent communications, IEEE T. CYBERNETICS, 53 (2023), 5706–5715. https://doi.org/10.1109/TCYB.2022.3165212 doi: 10.1109/TCYB.2022.3165212
|
| [10] |
X. Li, Z. Sun, Y. Tang, H. R. Karimi, Adaptive event-triggered consensus of multiagent systems on directed graphs, IEEE T. AUTOMAT. CONTR., 66 (2021), 1670–1685. https://doi.org/10.1109/TAC.2020.3000819 doi: 10.1109/TAC.2020.3000819
|
| [11] |
W. Hu, C. Yang, T. Huang, W. Gui, A distributed dynamic event-triggered control approach to consensus of linear multiagent systems with directed networks, IEEE T. CYBERNETICS, 50 (2020), 869–874. https://doi.org/10.1109/TCYB.2018.2868778 doi: 10.1109/TCYB.2018.2868778
|
| [12] |
H. Zhang, J. Zhang, Y. Cai, S. Sun, J. Sun, Leader-following consensus for a class of nonlinear multiagent systems under event-triggered and edge-event triggered mechanisms, IEEE T. CYBERNETICS, 52 (2022), 7643–7654. https://doi.org/10.1109/TCYB.2020.3035907 doi: 10.1109/TCYB.2020.3035907
|
| [13] |
Q. Zhou, W. Wang, H. Ma, H. Li, Event-triggered fuzzy adaptive containment control for nonlinear multiagent systems with unknown bouc-wen hysteresis input, IEEE T. FUZZY SYST., 29 (2021), 731–741. https://doi.org/10.1109/TFUZZ.2019.2961642 doi: 10.1109/TFUZZ.2019.2961642
|
| [14] |
Y. Wang, Z. Chen, M. Sun, Q. Sun, A novel implementation of an uncertain dead-zone-input-equipped extended state observer and sign estimator, INFORM. SCIENCES, 626 (2023), 75–93. https://doi.org/10.1016/j.ins.2023.01.060 doi: 10.1016/j.ins.2023.01.060
|
| [15] |
Z. Zhao, Z. Tan, Z. Liu, M. O. Efe, C. K. Ahn, Adaptive inverse compensation fault-tolerant control for a flexible manipulator with unknown dead-zone and actuator faults, IEEE T. IND. ELECTRON., 70 (2023), 12698–12707. https://doi.org/10.1109/TIE.2023.3239926 doi: 10.1109/TIE.2023.3239926
|
| [16] |
Z. Xi, Y. Wang, H. Zhang, F. Sun, Q. Zheng, Z. Zhu, Research on afterburning control of more electric engine with a nonlinear fuel supply system, PROCEEDINGS OF THE INSTITUTION OF MECHANICAL ENGINEERS PART G-JOURNAL OF AEROSPACE ENGINEERING, 237 (2023), 2647–2664. https://doi.org/10.1177/09544100231155696 doi: 10.1177/09544100231155696
|
| [17] |
Z. Wang, X. Wang, Fault-tolerant control for nonlinear systems with a dead zone: Reinforcement learning approach, MATH. BIOSCI. ENG., 20 (2023), 6334–6357. https://doi.org/10.3934/mbe.2023274 doi: 10.3934/mbe.2023274
|
| [18] | V.-T. Nguyen, T.-T. Bui, H.-Y. Pham, A finite-time adaptive fault tolerant control method for a robotic manipulator in task-space with dead zone, and actuator faults, INT. J. CONTROL AUTOM. SYST., (2023), to be published. https://doi.org/10.1007/s12555-022-1069-5 |
| [19] |
S. Dong, Y. Zhang, Identification modelling and fault-tolerant predictive control for industrial input nonlinear actuator system, MACHINES, 11 (2023), 240. https://doi.org/10.3390/machines11020240 doi: 10.3390/machines11020240
|
| [20] |
Y. H. Pham, T. L. Nguyen, T. T. Bui, T. Nguyen, V, Adaptive active fault tolerant control for a wheeled mobile robot under actuator fault and dead zone, IFAC PAPERSONLINE, 55 (2022), 314–319. https://doi.org/10.1016/j.ifacol.2022.11.203 doi: 10.1016/j.ifacol.2022.11.203
|
| [21] | G. Shao, X.-F. Wang, R. Wang, A distributed strategy for games in euler-lagrange systems with actuator dead zone, NEUROCOMPUTING, (2023), to be published. https://doi.org/10.1016/j.neucom.2023.126844 |
| [22] |
W. Wang, T. Wen, X. He, G. Xu, Path following with prescribed performance for under-actuated autonomous underwater vehicles subjects to unknown actuator dead-zone, IEEE T. INTELL. TRANSP. SYST., 24 (2023), 6257–6267. https://doi.org/10.1109/TITS.2023.3248153 doi: 10.1109/TITS.2023.3248153
|
| [23] |
Z. Liu, F. Wang, Y. Zhang, X. Chen, C. L. P. Chen, Adaptive tracking control for a class of nonlinear systems with a fuzzy dead-zone input, IEEE T. FUZZY SYST., 23 (2015), 193–204. https://doi.org/10.1109/TFUZZ.2014.2310491 doi: 10.1109/TFUZZ.2014.2310491
|
| [24] |
T. Zhang, R. Bai, Y. Li, Practically predefined-time adaptive fuzzy quantized control for nonlinear stochastic systems with actuator dead zone, IEEE T. FUZZY SYST., 31 (2023), 1240–1253. https://doi.org/10.1109/TFUZZ.2022.3197970 doi: 10.1109/TFUZZ.2022.3197970
|
| [25] |
J. Wang, Y. Yan, J. Liu, C. L. P. Chen, Z. Liu, C. Zhang, Nn event-triggered finite-time consensus control for uncertain nonlinear multi-agent systems with dead-zone input and actuator failures, ISA T., 137 (2023), 59–73. https://doi.org/10.1016/j.isatra.2023.01.032 doi: 10.1016/j.isatra.2023.01.032
|
| [26] |
Y. Wang, B. Ma, D. Wang, T. Chai, Event-triggered prespecified performance control for steer-by-wire systems with input nonlinearity, IEEE T. INTELL. TRANSP. SYST., 24 (2023), 6922–6931. https://doi.org/10.1109/TITS.2023.3242949 doi: 10.1109/TITS.2023.3242949
|
| [27] |
L. Xing, C. Wen, Z. Liu, H. Su, J. Cai, Event-triggered output feedback control for a class of uncertain nonlinear systems, IEEE T. AUTOMAT. CONTR., 64 (2019), 290–297. https://doi.org/10.1109/TAC.2018.2823386 doi: 10.1109/TAC.2018.2823386
|
| [28] |
A. Souahi, O. Naifar, A. Ben Makhlouf, M. A. Hammami, Discussion on barbalat lemma extensions for conformable fractional integrals, INT. J. CONTROL, 92 (2019), 234–241. https://doi.org/10.1080/00207179.2017.1350754 doi: 10.1080/00207179.2017.1350754
|
| [29] |
Y.-X. Li, G.-H. Yang, S. Tong, Fuzzy adaptive distributed event-triggered consensus control of uncertain nonlinear multiagent systems, IEEE T. SYST. MAN CY.-S., 49 (2019), 1777–1786. https://doi.org/10.1109/TSMC.2018.2812216 doi: 10.1109/TSMC.2018.2812216
|
Figures(5)

Xiaohang Su, Peng Liu, Haoran Jiang, Xinyu Yu. Neighbor event-triggered adaptive distributed control for multiagent systems with dead-zone inputs[J]. AIMS Mathematics, 2024, 9(4): 10031-10049. doi: 10.3934/math.2024491







 DownLoad:
DownLoad: