The goal of this paper is to provide analytical assessments to a fluid flowing in a porous medium with a non-linear diffusion linked to a degenerate diffusivity. The viscosity term is formulated with an Eyring-Powell law, together with a non-homogeneous diffusion typical of porous medium equations (as known in the theory of partial differential equations). Further, the equation is supplemented with an absorptive reaction term of Darcy-Forchheimer, commonly used to model flows in porous medium. The work starts by analyzing regularity, existence and uniqueness of solutions. Afterwards, the problem is transformed to study travelling wave kind of solutions. An asymptotic expansion is considered with a convergence criteria based on the geometric perturbation theory. Supported by this theory, there exists an exponential decaying rate in the travelling wave profile. Such exponential behaviour is validated with a numerical assessment. This is not a trivial result given the degenerate diffusivity induced by the non-linear diffusion of porous medium type and suggests the existence of regularity that can serve as a baseline to construct numerical or energetic approaches.
Citation: José Luis Díaz Palencia, Saeed ur Rahman, Antonio Naranjo Redondo. Analysis of travelling wave solutions for Eyring-Powell fluid formulated with a degenerate diffusivity and a Darcy-Forchheimer law[J]. AIMS Mathematics, 2022, 7(8): 15212-15233. doi: 10.3934/math.2022834
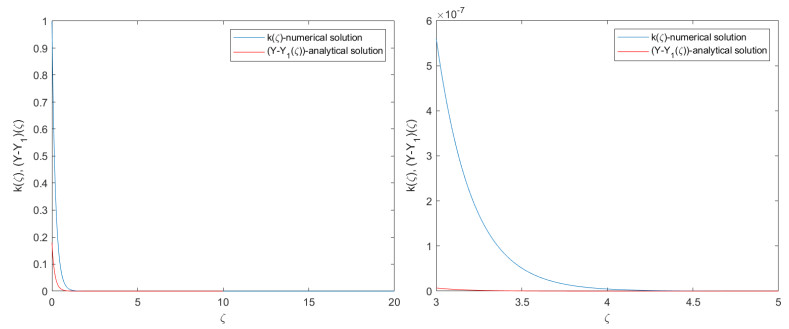
The goal of this paper is to provide analytical assessments to a fluid flowing in a porous medium with a non-linear diffusion linked to a degenerate diffusivity. The viscosity term is formulated with an Eyring-Powell law, together with a non-homogeneous diffusion typical of porous medium equations (as known in the theory of partial differential equations). Further, the equation is supplemented with an absorptive reaction term of Darcy-Forchheimer, commonly used to model flows in porous medium. The work starts by analyzing regularity, existence and uniqueness of solutions. Afterwards, the problem is transformed to study travelling wave kind of solutions. An asymptotic expansion is considered with a convergence criteria based on the geometric perturbation theory. Supported by this theory, there exists an exponential decaying rate in the travelling wave profile. Such exponential behaviour is validated with a numerical assessment. This is not a trivial result given the degenerate diffusivity induced by the non-linear diffusion of porous medium type and suggests the existence of regularity that can serve as a baseline to construct numerical or energetic approaches.

| [1] | H. Darcy, Les fontaines publiques de la ville de dijon, Paris: Dalmont, 1856. |
| [2] | P. Forchheimer, Wasserbewegung durch Boden, Zeitschrift des Vereines Deutscher Ingeneieure, 45 (1901), 1782–1788. |
| [3] | C. Jaeger, Engineering fluid mechanics, Edinburgh: Blackie and Son, 1956. |
| [4] | M. Muskat, The flow of homogeneous fluids through porous media, New York: McGrawHill Book Company, 1937. |
| [5] |
J. C. Ward, Turbulent flow in porous media, Journal of the Hydraulics Division, 5 (1964), 1–12. https://doi.org/10.1061/JYCEAJ.0001096 doi: 10.1061/JYCEAJ.0001096

|
| [6] |
D. Pal, H. Mondal, Hydromagnetic convective diffusion of species in Darcy-Forchheimer porous medium with nonuniform heat source/sink and variable viscosity, Int. Commun. Heat Mass, 39 (2012), 913–917. https://doi.org/10.1016/j.icheatmasstransfer.2012.05.012 doi: 10.1016/j.icheatmasstransfer.2012.05.012
|
| [7] |
R. U. Haq, F. A. Soomro, T. Mekkaouic, Q. M. Al-Mdallal, MHD natural convection flow enclosure in a corrugated cavity filled with a porous medium, Int. J. Heat Mass Tran., 121 (2018), 1168–1178. https://doi.org/10.1016/j.ijheatmasstransfer.2018.01.063 doi: 10.1016/j.ijheatmasstransfer.2018.01.063
|
| [8] |
T. Hayat, T. Muhammad, S. Al-Mezal, S. J. Liao, Darcy-Forchheimer flow with variable thermal conductivity and Cattaneo-Christov heat flux, International Journal of Numerical Methods for Heat and Fluid Flow, 26 (2016), 2355–2369. https://doi.org/10.1108/HFF-08-2015-0333 doi: 10.1108/HFF-08-2015-0333
|
| [9] |
N. A. Ganesh, A. K. A. Hakeem, B. Ganga, Darcy-Forchheimer flow of hydromagnetic nanofluid over a stretching/shrinking sheet in a thermally stratifed porous medium with second order slip, viscous and ohmic dissipations effects, Ain Shams Eng. J., 9 (2018), 939–951. https://doi.org/10.1016/j.asej.2016.04.019 doi: 10.1016/j.asej.2016.04.019
|
| [10] |
N. S. Akbar, A. Ebaid, Z. Khan, Numerical analysis of magnetic feld effects on Eyring-Powell fluid flow towards a stretching sheet, J. Magn. Magn. Mater., 382 (2015), 355–358. https://doi.org/10.1016/j.jmmm.2015.01.088 doi: 10.1016/j.jmmm.2015.01.088
|
| [11] |
S. Hina, MHD peristaltic transport of Eyring-Powell fluid with heat/mass transfer, wall properties and slip conditions, J. Magn. Magn. Mater., 404 (2016), 148–158. https://doi.org/10.1016/j.jmmm.2015.11.059 doi: 10.1016/j.jmmm.2015.11.059
|
| [12] |
M. Bhatti, T. Abbas, M. Rashidi, M. Ali, Z. Yang, Entropy generation on MHD Eyring-Powell nanofluid through a permeable stretching surface, Entropy, 18 (2016), 224. https://doi.org/10.3390/e18060224 doi: 10.3390/e18060224
|
| [13] |
A. Ara, N. A. Khan, H. Khan, F. Sultan, Radiation effect on boundary layer flow of an Eyring–Powell fluid over an exponentially shrinking sheet, Ain Shams Eng. J., 5 (2014), 1337–1342. https://doi.org/10.1016/j.asej.2014.06.002 doi: 10.1016/j.asej.2014.06.002
|
| [14] |
T. Hayat, Z. Iqbal, M. Qasim, S. Obaidat, Steady flow of an Eyring Powell fluid over a moving surface with convective boundary conditions, Int. J. Heat Mass Tran., 55 (2012), 1817–1822. https://doi.org/10.1016/j.ijheatmasstransfer.2011.10.046 doi: 10.1016/j.ijheatmasstransfer.2011.10.046
|
| [15] |
T. Hayat, M. Awais, S. Asghar, Radiative effects in a threedimensional flow of MHD Eyring-Powell fluid, Journal of the Egyptian Mathematical Society, 21 (2013), 379–384. https://doi.org/10.1016/j.joems.2013.02.009 doi: 10.1016/j.joems.2013.02.009
|
| [16] |
M. Jalil, S. Asghar, S. M. Imran, Self similar solutions for the flow and heat transfer of Powell-Eyring fluid over a moving surface in parallel free stream, Int. J. Heat Mass Tran., 65 (2013), 73–79. https://doi.org/10.1016/j.ijheatmasstransfer.2013.05.049 doi: 10.1016/j.ijheatmasstransfer.2013.05.049
|
| [17] |
J. A. Khan, M. Mustafa, T. Hayat, M. A. Farooq, A. Alsaedi, S. J. Liao, On model for three-dimensional flow of nanofluid: an application to solar energy, J. Mol. Liq., 194 (2014), 41–47. https://doi.org/10.1016/j.molliq.2013.12.045 doi: 10.1016/j.molliq.2013.12.045
|
| [18] |
A. Riaz, R. Ellahi, S. M. Sait, Role of hybrid nanoparticles in thermal performance of peristaltic flow of Eyring–Powell fluid model, J. Therm. Anal. Calorim., 143 (2021), 1021–1035. https://doi.org/10.1007/s10973-020-09872-9 doi: 10.1007/s10973-020-09872-9
|
| [19] |
A. S. Oke, Theoretical analysis of modified Eyring Powell fluid flow, J. Taiwan Inst. Chem. Eng., 132 (2022), 104152. https://doi.org/10.1016/j.jtice.2021.11.019 doi: 10.1016/j.jtice.2021.11.019
|
| [20] |
A. S. Oke, W. N. Mutuku, Significance of viscous dissipation on MHD Eyring–Powell flow past a convectively heated stretching sheet, Pramana-J. Phys., 95 (2021), 199. https://doi.org/10.1007/s12043-021-02237-3 doi: 10.1007/s12043-021-02237-3
|
| [21] |
A. S. Oke, Coriolis effects on MHD flow of MEP fluid over a non-uniform surface in the presence of thermal radiation, Int. Commun. Heat Mass, 129 (2021), 105695. https://doi.org/10.1016/j.icheatmasstransfer.2021.105695 doi: 10.1016/j.icheatmasstransfer.2021.105695
|
| [22] | A. S. Oke, W. N. Mutuku, Significance of Coriolis force on Eyring-Powell flow over a rotating non-uniform surface, Appl. Appl. Math., 16 (2021), 36. |
| [23] |
J. K. Kigio, W. N. Mutuku, A. S. Oke, Analysis of volume fraction and convective heat transfer on MHD Casson nanofluid over a vertical plate, Fluid Mechanics, 7 (2021), 1–8. https://doi.org/1.10.11648/j.fm.20210701.11 doi: 10.11648/j.fm.20210701.11
|
| [24] | A. S. Oke, Heat and mass transfer in 3D MHD flow of EG-based ternary hybrid nanofluid over a rotating surface, Arab. J. Sci. Eng., 2022, in press. https://doi.org/10.1007/s13369-022-06838-x |
| [25] | J. D. Murray, Mathematical biology, Berlin, Heidelberg: Springer, 1993. https://doi.org/10.1007/978-3-662-08542-4 |
| [26] | J. Smoller, Shock waves and reactiondiffusion equations, New York: Springer, 1994. https://doi.org/10.1007/978-1-4612-0873-0 |
| [27] | A. Champneys, G. Hunt, J. Thompson. Localization and solitary waves in solid mechanics, World Scientifc, 1999. https://doi.org/10.1142/4137 |
| [28] | A. De Pablo, Estudio de una ecuación de reacción-difusión, Doctoral Thesis, Universidad Autónoma de Madrid, 1989. |
| [29] |
A. de Pablo, J. L. Vázquez, Travelling waves and finite propagation in a reaction-diffusion equation, J. Differ. Equations, 93 (1991), 19–61. https://doi.org/10.1016/0022-0396(91)90021-Z doi: 10.1016/0022-0396(91)90021-Z
|
| [30] |
N. T. M. Eldabe, A. A. Hassan, M. A. Mohamed, Effect of couple stresses on the MHD of a non-Newtonian unsteady flow between two parallel porous plates, Zeitschrift für Naturforschung A, 58 (2003), 204–210. https://doi.org/10.1515/zna-2003-0405 doi: 10.1515/zna-2003-0405
|
| [31] |
N. Fenichel, Persistence and smoothness of invariant manifolds for flows, Indiana Univ. Math. J., 21 (1971), 193–226. https://doi.org/10.1512/IUMJ.1972.21.21017 doi: 10.1512/IUMJ.1972.21.21017
|
| [32] |
M. E. Akveld, J. Hulshof, Travelling wave solutions of a fourth-order semilinear diffusion equation, Appl. Math. Lett., 11 (1998), 115–120. https://doi.org/10.1016/S0893-9659(98)00042-1 doi: 10.1016/S0893-9659(98)00042-1
|
| [33] | C. K. R. T. Jones, Geometric singular perturbation theory, In: Dynamical systems, Berlin, Heidelberg: Springer, 1995, 44–118. https://doi.org/10.1007/BFb0095239 |
| [34] | H. Enright, P. H. Muir, A Runge-Kutta type boundary value ODE solver with defect control, Teh. Rep. 267/93, University of Toronto, Dept. of Computer Sciences, Toronto, Canada, 1993. |

Figures(2)

José Luis Díaz Palencia, Saeed ur Rahman, Antonio Naranjo Redondo. Analysis of travelling wave solutions for Eyring-Powell fluid formulated with a degenerate diffusivity and a Darcy-Forchheimer law[J]. AIMS Mathematics, 2022, 7(8): 15212-15233. doi: 10.3934/math.2022834







 DownLoad:
DownLoad: