In this study, first the pedal curves as the geometric locus of perpendicular projections to the Frenet vectors of a space curve were defined and the Frenet vectors, curvature, and torsion of these pedal curves were calculated. Second, for each pedal curve, Smarandache curves were defined by taking the Frenet vectors as position vectors. Finally, the expressions of Frenet vectors, curvature, and torsion related to the main curves were obtained for each Smarandache curve. Thus, new curves were added to the curve family.
Citation: Süleyman Şenyurt, Filiz Ertem Kaya, Davut Canlı. Pedal curves obtained from Frenet vector of a space curve and Smarandache curves belonging to these curves[J]. AIMS Mathematics, 2024, 9(8): 20136-20162. doi: 10.3934/math.2024981
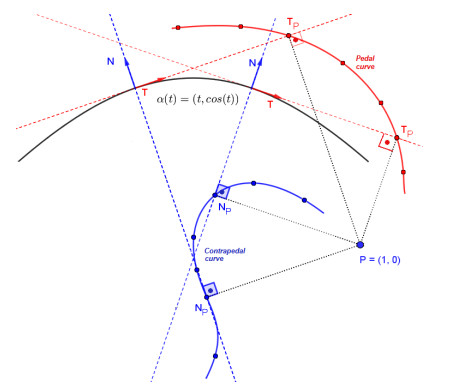
In this study, first the pedal curves as the geometric locus of perpendicular projections to the Frenet vectors of a space curve were defined and the Frenet vectors, curvature, and torsion of these pedal curves were calculated. Second, for each pedal curve, Smarandache curves were defined by taking the Frenet vectors as position vectors. Finally, the expressions of Frenet vectors, curvature, and torsion related to the main curves were obtained for each Smarandache curve. Thus, new curves were added to the curve family.

| [1] |
S. G. Mazlum, S. Şenyurt, M. Bektaş, Salkowski curves and their modified orthogonal frames in $E^3$, J. New Theory, 40 (2022), 12–26. https://doi.org/10.53570/jnt.1140546 doi: 10.53570/jnt.1140546

|
| [2] |
S. Şenyurt, D. Canlı, K. H. Ayvacı, Associated curves from a different point of view in $E^3$, Commun. Fac. Sci. Univ. Ank. Ser. A1 Math. Stat., 71 (2022), 826–845. https://doi.org/10.31801/cfsuasmas.1026359 doi: 10.31801/cfsuasmas.1026359
|
| [3] | A. T. Ali, Special Smarandache curves in the Euclidean space, International J.Math. Combin., 2 (2010), 30–36. |
| [4] | M. Turgut, S. Yılmaz, Smarandache curves in Minkowski space-time, International J. Math. Combin., 3 (2008), 51–55. |
| [5] | S. Şenyurt, S. Sivas, An application of Smarandache curve, Ordu Univ. J. Sci. Tech., 3 (2013), 46–60. |
| [6] | A. Y. Ceylan, M. Kara, On pedal and contrapedal curves of Bezier curves, Konuralp J. Math., 9 (2021), 217–221. |
| [7] |
E. As, A. Sarıoğlugil, On the pedal surfaces of 2-d surfaces with the constant support function in $E^4$, Pure Math. Sci., 4 (2015), 105–120. http://dx.doi.org/10.12988/pms.2015.545 doi: 10.12988/pms.2015.545
|
| [8] | M. P. Carmo, Differential geometry of curves and surfaces, Prentice Hall, 1976. |
| [9] | N. Kuruoğlu, A. Sarıoğlugil, On the characteristic properties of the a-Pedal surfaces in the euclidean space $E^3$, Commun. Fac. Sci. Univ. Ank. Series A, 42 (1993), 19–25. |
| [10] |
O. O. Tuncer, H. Ceyhan, I. Gök, F. N. Ekmekci, Notes on pedal and contrapedal curves of fronts in the Euclidean plane, Math. Methods Appl. Sci., 41 (2018), 5096–5111. https://doi.org/10.1002/mma.5056 doi: 10.1002/mma.5056
|
| [11] |
Y. Li, D. Pei, Pedal curves of fronts in the sphere, J. Nonlinear Sci. Appl., 9 (2016), 836–844. http://dx.doi.org/10.22436/jnsa.009.03.12 doi: 10.22436/jnsa.009.03.12
|
| [12] |
Y. Li, D. Pei, Pedal curves of frontals in the Euclidean plane, Math. Methods Appl. Sci., 41 (2018), 1988–1997. https://doi.org/10.1002/mma.4724 doi: 10.1002/mma.4724
|
| [13] |
Y. Li, O. O. Tuncer, On (contra)pedals and (anti)orthotomics of frontals in de Sitter 2‐space, Math. Methods Appl. Sci., 46 (2023), 11157–11171. https://doi.org/10.1002/mma.9173 doi: 10.1002/mma.9173
|
| [14] | E. Abbena, S. Salamon, A. Gray, Modern differential geometry of curves and surfaces with mathematica, New York: Chapman and Hall/CRC, 2016. https://doi.org/10.1201/9781315276038 |
| [15] | M. Özdemir, Diferansiyel geometri, Altin Nokta Yayınevi, 2020. |




Figures(5)

Süleyman Şenyurt, Filiz Ertem Kaya, Davut Canlı. Pedal curves obtained from Frenet vector of a space curve and Smarandache curves belonging to these curves[J]. AIMS Mathematics, 2024, 9(8): 20136-20162. doi: 10.3934/math.2024981







 DownLoad:
DownLoad: