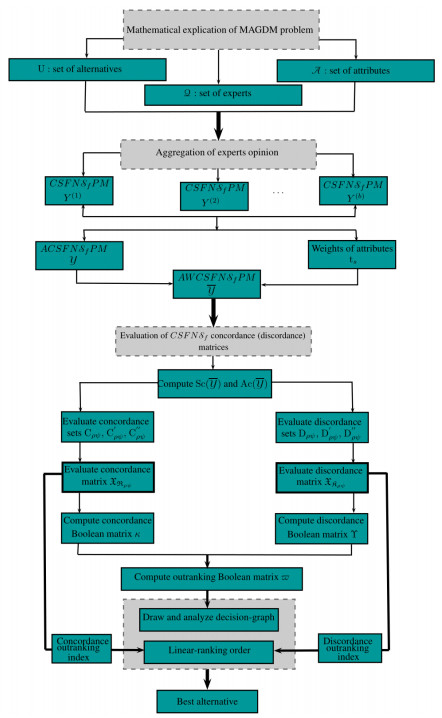
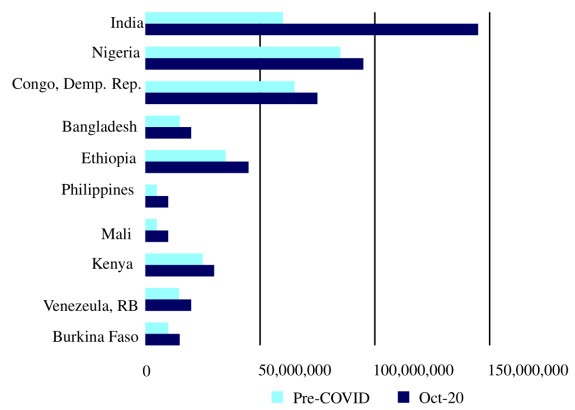
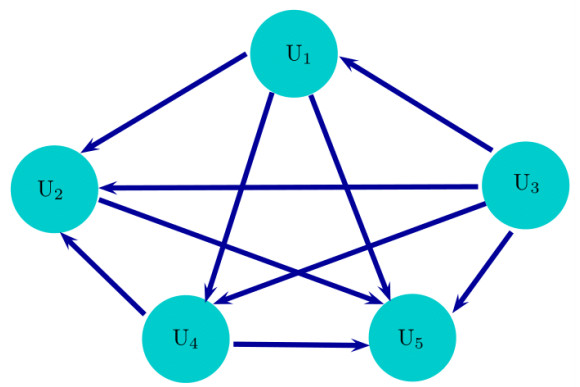
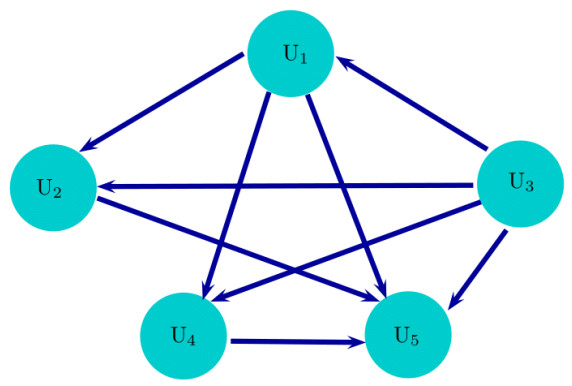
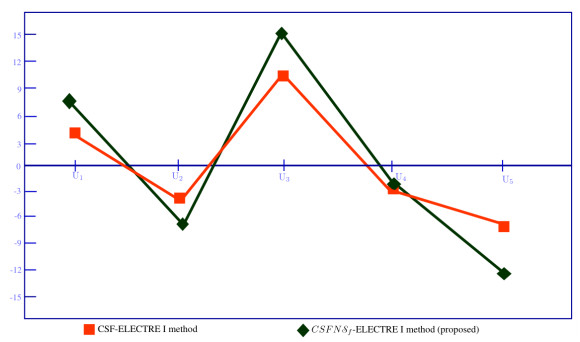
This paper develops the ELiminating Et Choice Translating REality (ELECTRE) method under the generalized environment of complex spherical fuzzy $ N $-soft sets ($ CSFN\mathcal{S}_{f}Ss $) that have distinctive and empirical edge of non-binary parametrization and also indeed overcome the limitations and flaws of existing ELECTRE I methods. We propose an innovatory decision-making technique, namely, $ CSFN\mathcal{S}_{f} $-ELECTRE I method where the data and information are in modern modes. The proposed $ CSFN\mathcal{S}_{f} $-ELECTRE I method enjoys all the distinct and modern attributes of uncertain information which mainly comprises of parameterizations, neutral perspective, multi-valuation and two-dimensional representations. We support the proposed work by a flowchart along with an algorithm and then utilize it to solve the MAGDM problem under $ CSFN\mathcal{S}_{f} $ environment. This novel technique employs the principles of $ CSFN\mathcal{S}_{f} $ concordance and $ CSFN\mathcal{S}_{f} $ discordance sets which are established on score and accuracy functions and engrossed to enjoin the most superior alternative. Ultimately, the decision graph and aggregated outranking Boolean matrix are formulated by merging the outcomes of $ CSFN\mathcal{S}_{f} $ concordance and $ CSFN\mathcal{S}_{f} $ discordance indices which are evaluated through score function and distance measures, respectively. Moreover, linear-ranking order is evaluated which provides linear ordering of decision alternatives. A prime MAGDM problem of poverty alleviation is addressed from socio-economic field that approve the flexibility of the intended approach. We perform a sustaining comparison with another approach (CSF-ELECTRE I approach) to assure the productivity and potency of the proposed methodology. We also provide an allegorical line graph of this comparison that demonstrate the admissibility of the resulting outcomes.
Citation: Muhammad Akram, Adeel Farooq, Maria Shabir, Mohammed M. Ali Al-Shamiri, Mohammed M. Khalaf. Group decision-making analysis with complex spherical fuzzy $ N $-soft sets[J]. Mathematical Biosciences and Engineering, 2022, 19(5): 4991-5030. doi: 10.3934/mbe.2022234
This paper develops the ELiminating Et Choice Translating REality (ELECTRE) method under the generalized environment of complex spherical fuzzy $ N $-soft sets ($ CSFN\mathcal{S}_{f}Ss $) that have distinctive and empirical edge of non-binary parametrization and also indeed overcome the limitations and flaws of existing ELECTRE I methods. We propose an innovatory decision-making technique, namely, $ CSFN\mathcal{S}_{f} $-ELECTRE I method where the data and information are in modern modes. The proposed $ CSFN\mathcal{S}_{f} $-ELECTRE I method enjoys all the distinct and modern attributes of uncertain information which mainly comprises of parameterizations, neutral perspective, multi-valuation and two-dimensional representations. We support the proposed work by a flowchart along with an algorithm and then utilize it to solve the MAGDM problem under $ CSFN\mathcal{S}_{f} $ environment. This novel technique employs the principles of $ CSFN\mathcal{S}_{f} $ concordance and $ CSFN\mathcal{S}_{f} $ discordance sets which are established on score and accuracy functions and engrossed to enjoin the most superior alternative. Ultimately, the decision graph and aggregated outranking Boolean matrix are formulated by merging the outcomes of $ CSFN\mathcal{S}_{f} $ concordance and $ CSFN\mathcal{S}_{f} $ discordance indices which are evaluated through score function and distance measures, respectively. Moreover, linear-ranking order is evaluated which provides linear ordering of decision alternatives. A prime MAGDM problem of poverty alleviation is addressed from socio-economic field that approve the flexibility of the intended approach. We perform a sustaining comparison with another approach (CSF-ELECTRE I approach) to assure the productivity and potency of the proposed methodology. We also provide an allegorical line graph of this comparison that demonstrate the admissibility of the resulting outcomes.

| [1] |
L. G. Fei, Y. Deng, Multi-criteria decision making in Pythagorean fuzzy environment, Appl. Intell., 50 (2020), 537–561. https://doi.org/10.1007/s10489-019-01532-2 doi: 10.1007/s10489-019-01532-2

|
| [2] |
J. X. Deng, Y. Deng, Information volume of fuzzy membership function, Int. J. Comput., Comms. Control, 16 (2021). https://doi.org/10.15837/ijccc.2021.1.4106 doi: 10.15837/ijccc.2021.1.4106
|
| [3] |
Q. L. Zhou, Y. Deng, A new divergence measure of pythagorean fuzzy sets based on belief function and its application in medical diagnosis, Mathematics, 8 (2020), 142. https://doi.org/10.3390/math8010142 doi: 10.3390/math8010142
|
| [4] | Z. Meng, L. Xue, F. Yang, C. Wang, Y. Liu, Application of intuitionistic fuzzy decision-making theory to the allocation of poverty alleviation project funds, in International Conference on Management Science and Engineering Management, (2018), 79–86. https://doi.org/10.1007/978-3-319-93351-1_7 |
| [5] |
B. Roy, The outranking approach and the foundations of ELECTRE methods, Readings in Multiple Criteria Decision Aid, Springer, Berlin, Heidelberg, (1990), 155–183. https://doi.org/10.1007/978-3-642-75935-2_8 doi: 10.1007/978-3-642-75935-2_8
|
| [6] | R. Benayoun, B. Roy, N. Sussman, Manual de reference du programme electre, Note de Synthese et Formation, 25 (1966), 79. |
| [7] |
J. Figueira, V. Mousseau, B. Roy, ELECTRE methods, Multiple Criteria Decision Analysis: State of the Art Surveys Springer, New York, (2005), 133–153. https://doi.org/10.1007/978-1-4939-3094-4 doi: 10.1007/978-1-4939-3094-4
|
| [8] |
L. A. Zadeh, Fuzzy sets, Inform. Control, 8 (1965), 338–356. https://doi.org/10.1016/S0019-9958(65)90241-X doi: 10.1016/S0019-9958(65)90241-X
|
| [9] |
B. Vahdani, A. H. K. Jabbari, V. Roshanaei, M. Zandieh, Extension of the ELECTRE method for decision-making problems with interval weights and data, Int. J. Adv. Manfg. Tech., 50 (2010), 793–800. https://doi.org/10.1007/s00170-010-2537-2 doi: 10.1007/s00170-010-2537-2
|
| [10] |
M. Kabak, S. Burmaogolu, Y. Kazancogolu, A fuzzy hybrid MCDM approach for professional selection, Expert Syst. Appl., 39 (2012), 3516–3525. https://doi.org/10.1007/s44196-021-00038-5 doi: 10.1007/s44196-021-00038-5
|
| [11] |
M. A. Alghamdi, N. O. Alshehri, M. Akram, Multi-criteria decision-making methods in bipolar fuzzy environment, Int. J. Fuzzy Syst., 20 (2018), 2057–2064. https://doi.org/10.1007/s40815-018-0499-y doi: 10.1007/s40815-018-0499-y
|
| [12] |
M. Akram, Shumaiza, F. Smarandache, Decision-making with bipolar neutrosophic TOPSIS and bipolar neutrosophic ELECTRE-I, Axioms, 7 (2018), 33. https://doi.org/10.3390/axioms7020033 doi: 10.3390/axioms7020033
|
| [13] |
N. Chen, Z. Xu, M. Xia, The ELECTRE I multi-criteria decision-making method based on hesitant fuzzy sets, Int. J. Inform. Tech. Decis. Making, 14 (2015), 621–57. https://doi.org/10.1142/S0219622014500187 doi: 10.1142/S0219622014500187
|
| [14] |
K. T. Atanassov, Intuitionistic fuzzy sets, Fuzzy Sets Syst., 20 (1986), 87–96. https://doi.org/10.1007/978-3-7908-1870-3_1 doi: 10.1007/978-3-7908-1870-3_1
|
| [15] |
M. C. Wu, T. Y. Chen, The ELECTRE multicriteria analysis approach based on Atanassov's intuitionistic fuzzy sets, Expert Syst. Appl., 38 (2011), 12318–12327. 10.1109/FUZZY.2009.5276880 doi: 10.1109/FUZZY.2009.5276880
|
| [16] |
B. D. Rouyendegh, The intuitionistic fuzzy ELECTRE model, Int. J. Manage. Sci. Eng. Manage., 13 (2018), 139–145. https://doi.org/10.1080/17509653.2017.1349625 doi: 10.1080/17509653.2017.1349625
|
| [17] | R. R. Yager, Pythagorean membership grades in multicriteria decision making, IEEE Trans. Fuzzy Syst., 22 (2013), 958–965. |
| [18] |
M. Akram, H. Garg, F. Ilyas, Multi-criteria group decision making based on ELECTRE I method in Pythagorean fuzzy information, Soft Comput., 24 (2020), 3425–3453. https://doi.org/10.1109/TFUZZ.2013.2278989 doi: 10.1109/TFUZZ.2013.2278989
|
| [19] |
M. Akram, A. Luqman, C. Kahraman, Hesitant Pythagorean fuzzy ELECTRE-II method for multi-criteria decision-making problems, Appl. Soft Comput., 108 (2021), 107479. https://doi.org/10.1016/j.asoc.2021.107479 doi: 10.1016/j.asoc.2021.107479
|
| [20] | B. C. Cuong, V. Kreinovich, Picture fuzzy sets-a new concept for computational intelligence problems, in Third World Congress on Information and Communication Technologies (WICT 2013), (2013), 1–6. https://doi.org/10.1109/WICT.2013.7113099 |
| [21] |
W. Z. Liang, G. Y. Zhao, S. Z. Luo, An integrated EDAS-ELECTRE method with picture fuzzy information for cleaner production evaluation in gold mines, IEEE Access, 6 (2018), 65747–65759. https://doi.org/10.1109/ACCESS.2018.2878747 doi: 10.1109/ACCESS.2018.2878747
|
| [22] |
F. K. Gündogdu, C. Kahraman, Spherical fuzzy sets and spherical fuzzy TOPSIS method, J. Intell. Fuzzy Syst., 36 (2019), 337–352. https://doi.org/10.3233/JIFS-181401 doi: 10.3233/JIFS-181401
|
| [23] |
T. Mahmood, K. Ullah, Q. Khan, N. Jan, An approach toward decision-making and medical diagnosis problems using the concept of spherical fuzzy sets, Neural Comput. Appl., 31 (2019), 7041–7053. https://doi.org/10.1007/s00521-018-3521-2 doi: 10.1007/s00521-018-3521-2
|
| [24] | C. Kahraman, F. K. Gündogdu, S. C. Onar, B. Oztaysi, Hospital location selection using spherical fuzzy TOPSIS method, in Conference of the international Fuzzy Systems Association and the European Society for Fuzzy Logic and Technology (EUSFLAT2019), 2019. https://www.atlantis-press.com/article/125914782.pdf |
| [25] |
S. Ashraf, S. Abdullah, M. Aslam, M. Qiyas, M. A. Kutbi, Spherical fuzzy sets and its representation of spherical fuzzy $t$-norms and $t$-conorms, J. Intell. Fuzzy Syst., 36 (2019), 6089–6102. https:doi.org/10.3233/JIFS-181941 doi: 10.3233/JIFS-181941
|
| [26] |
D. Ramot, R. Milo, M. Friedman, A. Kandel, Complex fuzzy sets, IEEE Trans. Fuzzy Syst., 10 (2002), 171–186. https://doi.org/10.1109/91.995119 doi: 10.1109/91.995119
|
| [27] | A. Alkouri, A. Salleh, Complex intuitionistic fuzzy sets, in 2nd International Conference on Fundamental and Applied Sciences, 1482 (2012), 464–470. https://doi.org/10.1063/1.4757515 |
| [28] |
K. Ullah, T. Mahmood, Z. Ali, N. Jan, On some distance measures of complex Pythagorean fuzzy sets and their applications in pattern recognition, Complex Intell. Syst. 6 (2020), 15–27. https://doi.org/10.1007/s40747-019-0103-6 doi: 10.1007/s40747-019-0103-6
|
| [29] |
M. Akram, H. Garg, K. Zahid, Extensions of ELECTRE-I and TOPSIS methods for group decision-making under complex Pythagorean fuzzy environment, Iran. J. Fuzzy Syst., 17 (2020), 147–164. https:doi.org/10.22111/ijfs.2020.5522 doi: 10.22111/ijfs.2020.5522
|
| [30] |
M. Akram, A. N. Al Kenani, M. Shabir, Enhancing ELECTRE I method with complex spherical fuzzy information, Int. J. Comput. Intell. Syst., 14 (2021), 1–31. https://doi.org/10.1007/s44196-021-00038-5 doi: 10.1007/s44196-021-00038-5
|
| [31] |
D. A. Molodtsov, Soft set theory-first results, Comput. Math. Appl., 37 (1999), 19–31. https://doi.org/10.1016/S0898-1221(99)00056-5 doi: 10.1016/S0898-1221(99)00056-5
|
| [32] |
F. Fatimah, D. Rosadi, R. B. F. Hakim, J. C. R. Alcantud, $N$-soft sets and their decision making algorithms, Soft Comput., 22 (2018), 3829–3842. https://doi.org/10.1007/s00500-017-2838-6 doi: 10.1007/s00500-017-2838-6
|
| [33] |
M. Akram, A. Adeel, J. C. R. Alcantud, Fuzzy $N$-soft sets: A novel model with applications, J. Intell. Fuzzy Syst., 35 (2018), 4757–4771. https://doi.org/10.3233/JIFS-18244 doi: 10.3233/JIFS-18244
|
| [34] |
M. Akram, A. Adeel, J. C. R. Alcantud, Group decision-making methods based on hesitant $N$-soft sets, Expert Syst. Appl., 115(2019), 95–105. https://doi.org/10.1016/j.eswa.2018.07.060 doi: 10.1016/j.eswa.2018.07.060
|
| [35] |
H. Zhang, D. Jia-Hua, C. Yan, Multi-attribute group decision-making methods based on Pythagorean fuzzy $N$-soft sets, IEEE Access, 8 (2020), 62298–62309. https://doi.org/10.1109/ACCESS.2020.2984583 doi: 10.1109/ACCESS.2020.2984583
|
| [36] |
M. Akram, F. Waseem, A. N. Al-Kenan, A hybrid decision-making approach under complex pythagorean fuzzy $N$-soft sets, Int. J. Comput. Intell. Syst., 14 (2021), 263–1291. https://doi.org/10.2991/ijcis.d.210331.002 doi: 10.2991/ijcis.d.210331.002
|
| [37] |
M. Akram, M. Shabir, A. N. Al Kenani, J. C. R. Alcantud, Hybrid decision-making frameworks under complex spherical fuzzy $N$-soft sets, J. Math., (2021), 1–46. https://doi.org/10.1155/2021/5563215 doi: 10.1155/2021/5563215
|
| [38] |
M. Akram, M. Shabir, A. N. Al Kenani, A multiattribute decision-making framework: VIKOR method with complex spherical fuzzy-soft sets, Math. Probl. Eng., 2021. https://doi.org/10.1155/2021/1490807 doi: 10.1155/2021/1490807
|
| [39] |
M. Akram, C. Kahraman, K. Zahid, Group decision-making based on complex spherical fuzzy VIKOR approach, Knowl.-Based Syst., 216 (2021), 106793. https://doi.org/10.1016/j.knosys.2021.106793 doi: 10.1016/j.knosys.2021.106793
|
| [40] |
M. Akram, G. Ali, J. C. R. Alcantud, New decision-making hybrid model: Intuitionistic fuzzy $N$-soft rough sets, Soft Comput., 23 (2019), 9853–9868. https://doi.org/10.1007/s00500-019-03903-w doi: 10.1007/s00500-019-03903-w
|
| [41] |
M. Akram, C. Kahraman, K. Zahid, Extension of TOPSIS model to the decision-making under complex spherical fuzzy information, Soft Comput., 25 (2021), 10771–10795. https://doi.org/10.1007/s00500-021-05945-5 doi: 10.1007/s00500-021-05945-5
|
Figures(6) / Tables(29)

Muhammad Akram, Adeel Farooq, Maria Shabir, Mohammed M. Ali Al-Shamiri, Mohammed M. Khalaf. Group decision-making analysis with complex spherical fuzzy $ N $-soft sets[J]. Mathematical Biosciences and Engineering, 2022, 19(5): 4991-5030. doi: 10.3934/mbe.2022234







 DownLoad:
DownLoad: