Citation: Long Wen, Liang Gao, Yan Dong, Zheng Zhu. A negative correlation ensemble transfer learning method for fault diagnosis based on convolutional neural network[J]. Mathematical Biosciences and Engineering, 2019, 16(5): 3311-3330. doi: 10.3934/mbe.2019165

| [1] | L. Wen, Y. Dong and L. Gao, A new ensemble residual convolutionalneural network for remaining useful life estimation, Math. Biosci. Eng., 16 (2019), 862–880. |
| [2] | H. D. Shao, H. K. Jiang, X. Zhang, et al., Rolling bearing fault diagnosis using an optimization deepbelief network, Meas. Sci. Tech., 26 (2015), 115002. |
| [3] | R. Zhao, R. Yan, Z. Chen, et al., Deep learning and itsapplications to machine health monitoring: A survey. arXiv preprint arXiv:1612.07640, 2016. |
| [4] | M. Cerrada, R. V. Sánchez, C. Li, et al., A review on data-driven fault severityassessment in rolling bearings, Mech. Syst. Signal Proc., 99 (2018), 169–196. |
| [5] | Y. Bengio, A. Courville and P. Vincent, Representation learning: a review and new perspectives, IEEE T. Pattern Anal. Mach. Intell., 35 (2013), 1798–1828. |
| [6] | L. Wen, L. Gao and X. Y. Li, A new deep transfer learning based on sparseauto-encoder for fault diagnosis, IEEE T.Syst. Man Cybern. Syst., 49 (2019), 136–144. |
| [7] | J. L. Wang, J. Zhang and X. X. Wang, A data driven cycle time prediction with featureselection in a semiconductor wafer fabrication system, IEEE T. Semicond. Manuf., 31 (2018), 173–182. |
| [8] | S. Shao, S. McAleer, R. Yan, et al., Highly-accuratemachine fault diagnosis using deep transfer learning, IEEE T. Ind. Inform., 15 (2019), 2446–2455. |
| [9] | Z. Y. Wang, C. Lu and B. Zhou, Fault diagnosis for rotary machinery with selectiveensemble neural networks, Mech. Syst.Signal Proc., 113 (2018), 112–130. |
| [10] | D. H. Wolpert and W. G.Macready, No free lunch theorems for optimization, IEEE T. Evol. Comput., 1 (1997), 67–82. |
| [11] | H. Y. Sang, Q. K. Pan, J. Q. Li, et al., Effectiveinvasive weed optimization algorithms for distributed assembly permutationflowshop problem with total flowtime criterion, Swarm Evol. Comput., 44 (2019), 64–73. |
| [12] | X. Y. Li, C. Lu, L. Gao, et al., An Effective Multi-Objective Algorithm forEnergy Efficient Scheduling in a Real-Life Welding Shop, IEEE T. Ind. Inform., 14 (2018), 5400–5409. |
| [13] | J. Yosinski, J. Clune, Y. Bengio, et al., How transferable arefeatures in deep neural networks? In Advances in neural information processingsystems, (2014), 3320–3328. |
| [14] | L. Wen, X. Y. Li and L. Gao, A New Two-level Hierarchical Diagnosis Network based onConvolutional Neural Network, IEEE T.Instrum. Meas., (2019). |
| [15] | H. Y. Sang, Q. K. Pan, P. Y. Duan, et al., Aneffective discrete invasive weed optimization algorithm for lot-streamingflowshop scheduling problems. J. Intell.Manuf., 29 (2018), 1337–1349. |
| [16] | X.Y. Li, L. Gao, Q. Pan, et al., An effectivehybrid genetic algorithm and variable neighborhood search for integratedprocess planning and scheduling in a packaging machine workshop. IEEE Trans. Syst. Man Cybern. Syst., (2018). |
| [17] | K. Tidriri, N. Chatti, S. Verron, et al., Bridging data-driven andmodel-based approaches for process fault diagnosis and health monitoring: Areview of researches and future challenges, Annu.Rev. Control, 42 (2016), 63–81. |
| [18] | Z. Y. Yin and J. Hou, Recent advances on SVMbased fault diagnosis and process monitoring in complicated industrialprocesses, Neurocomputing, 174 (2016), 643–650. |
| [19] | J. Zheng, L. Gao, H. B. Qiu, et al., Difference mapping methodusing least square support vector regression for variable-fidelityapproximation modelling, Eng. Optimiz., 47 (2015), 719–736. |
| [20] | T. Han, D. Jiang, Q. Zhao, et al., Comparison of random forest,artificial neural networks and support vector machine for intelligent diagnosisof rotating machinery, Trans. Inst. Meas.Control, (2017), 1–13. |
| [21] | B. Cai, L. Huang and M. Xie, Bayesian networks in fault diagnosis, IEEE T. Ind. Inform., 13 (2017), 2227–2240. |
| [22] | L. Wen, L. Gao and X. Y. Li, A new snapshot ensemble convolutional neuralnetwork for fault diagnosis, IEEE Access, 7 (2019), 32037–32047. |
| [23] | F. Wang, H. K. Jiang, H. D. Shao, et al., An adaptive deepconvolutional neural network for rolling bearing fault diagnosis, Meas. Sci. Technol., 28 (2017), 9. |
| [24] | J. L. Wang, J. Zhang and X. X. Wang, Bilateral LSTM: Atwo-dimensional long short-term memory model with multiply memory units forshort-term cycle time forecasting in re-entrant manufacturing systems. IEEE T. Ind. Inform., 14 (2018), 748–758. |
| [25] | J. Pan, Y. Zi, J. Chen, et al., LiftingNet: A novel deep learningnetwork with layerwise feature learning from noisy mechanical data for faultclassification, IEEE T. Ind. Inform., 65 (2018), 4973–4982. |
| [26] | S. B. Li, G. K. Liu, X. H. Tang, et al., An ensemble deepconvolutional neural network model with improved ds evidence fusion for bearingfault diagnosis, Sensors, 17 (2017), 1729. |
| [27] | C. Lu, Z. Y. Wang and B. Zhou, Intelligent fault diagnosis of rolling bearing using hierarchicalconvolutional network based health state classification, Adv. Eng. Inform., 32 (2017), 139–151. |
| [28] | B. Zhang, W. Li, X. Li, et al., Intelligent fault diagnosis undervarying working conditions based on domain adaptive convolutional neural networks, IEEE Access, 6 (2018), 66367–66384. |
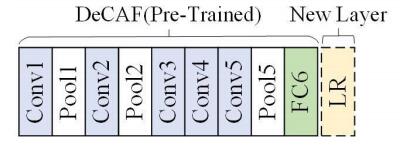
| [29] | J. Donahue, Y. Q. Jia, O, Vinyals, et al., Decaf: A deepconvolutional activation feature for generic visual recognition, Internationalconference on machine learning, (2014),647–655. |
| [30] | R. Ren, T. Hung and K. C. Tan, A generic deep-learning-based approach for automatedsurface inspection, IEEE T. Cybern., 48 (2018), 929–940. |
| [31] | J. Wehrmann, G. S. Simoes and R. C. Barros, et al., Adultcontent detection in videos with convolutional and recurrent neural networks, Neurocomputing, 272 (2017), 432–438. |
| [32] | H. C. Shin, H. R. Roth, M. C. Gao, et al., Deep convolutionalneural networks for computer-aided detection: CNN architectures, datasetcharacteristics and transfer learning, IEEET. Med. Imaging, 35 (2016), 1285–1298. |
| [33] | E. Rezende, G. Ruppert, T. Carvalho, et al., Malicious softwareclassification using transfer learning of ResNet-50 deep neural network, 201716th IEEE International Conference on Machine Learning and Applications (ICMLA), (2017), 1011–1014. |
| [34] | O. Janssens, R. Walle, M. Loccufier, et al., Deep learning forinfrared thermal image based machine health monitoring. IEEE-ASME Trans. Mechatron., 23 (2018), 151–159. |
| [35] | Y. Zhou, W. C. Yi, L. Gao, et al., Adaptive differential evolution with sortingcrossover rate for continuous optimization problems. IEEE T. Cybern., 47 (2017), 2742–2753. |
| [36] | H. Y. Sang, P. Y. Duan and J. Q. Li, An effective invasive weed optimization algorithm forscheduling semiconductor final testing problem. Swarm Evol. Comput., 38 (2018), 42–53. |
| [37] | L. K. Hansen and P. Salamon, Neural network ensembles, IEEE T. Pattern Anal. Mach. Intell., 12 (1999), 993–1001. |
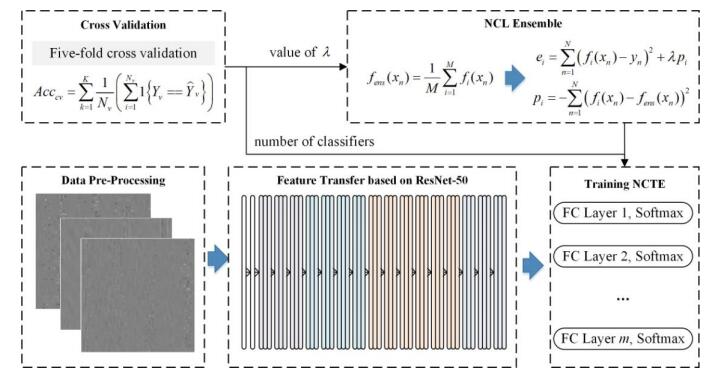
| [38] | H. H. Chen and X. Yao, Regularized negative correlation learning for neuralnetwork ensembles, IEEE T. Neural Netw., 20 (2009), 1962–1979. |
| [39] | J. C. Fernández, M. Cruz-Ramírez and C. Hervás-Martínez, Sensitivityversus accuracy in ensemble models of artificial neural networks frommulti-objective evolutionary algorithms. NeuralComput. Appl., 30 (2018), 289–305. |
| [40] | C. Hu, B. D. Youn, P. Wang, et al., Ensemble of data-drivenprognostic algorithms for robust prediction of remaining useful life, Reliab. Eng. Syst. Saf., 1 (2012), 120–35. |
| [41] | Z. Wu, W. Lin and Y. Ji, An integrated ensemble learning model for imbalanced faultdiagnostics and prognostics. IEEE Access, 6 (2018), 8394–8402. |
| [42] | U. P. Chong, Signal model-based fault detection and diagnosis forinduction motors using features of vibration signal in two-dimension domain. Strojniski Vestn. J. Mech. Eng., 57 (2011), 655–666. |
| [43] | L. Wen, X. Y. Li, L. Gao, et al., A new convolutional neuralnetwork based data-driven fault diagnosis method, IEEE Trans. Ind. Electron., 65 (2018), 5990–5998. |
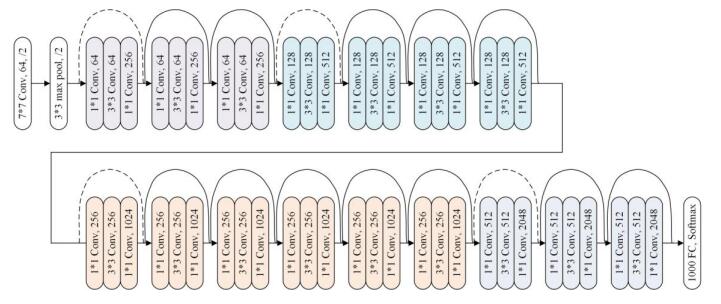
| [44] | K. M. He, X.Y. Zhang, S. Q. Ren, et al., Deep residuallearning for image recognition, IEEE Conference on Computer Vision and PatternRecognition, (2016),770–778. |
| [45] | K. M. He, X. Y. Zhang, S. Q. Ren, et al., Delving deep into rectifiers: Surpassing human-level performanceon ImageNet classification. IEEEInternational Conference on Computer Vision, (2015),1026–1034. |
| [46] | M. Xiao, L. Wen, X. Li, et al., Modelingof the feed-motor transient current in end milling by using varying-coefficientmodel. Math. Probl. Eng., (2015). |
| [47] | S. Arlot and A. Celisse, A survey ofcross-validation procedures for model selection, Statistics surveys, 4 (2010), 40–79. |
| [48] | I. H. Witten, E. Frank, M. A. Hall, et al., Data Mining: Practical machinelearning tools and techniques. Morgan Kaufmann, (2016). |
| [49] | C. Lessmeier, J. K. Kimotho, D. Zimmer, et al., Conditionmonitoring of bearing damage in electromechanical drive systems by using motorcurrent signals of electric motors: A benchmark data set for data-drivenclassification. European Conference of the Prognostics and Health ManagementSociety, 05-08, (2016). |
| [50] | T. Han, D. Jiang, Q. Zhao, et al., Comparison of random forest, artificial neural networks andsupport vector machine for intelligent diagnosis of rotating machinery. Trans. Inst. Meas. Control, (2017), 1–13. |
| [51] | Y. H. Chen, G. L. Peng, C. H. Xie, et al., ACDIN: Bridging the gapbetween artificial and real bearing damages for bearing fault diagnosis, Neurocomputing, 294 (2018), 61–71. |
| [52] | Z. Y. Zhu, G. L. Peng, Y. H. Chen, et al., A convolutional neuralnetwork based on a capsule network with strong generalization for bearing faultdiagnosis, Neurocomputing, 323 (2019), 62–75. |
Figures(8) / Tables(7)

Long Wen, Liang Gao, Yan Dong, Zheng Zhu. A negative correlation ensemble transfer learning method for fault diagnosis based on convolutional neural network[J]. Mathematical Biosciences and Engineering, 2019, 16(5): 3311-3330. doi: 10.3934/mbe.2019165







 DownLoad:
DownLoad: