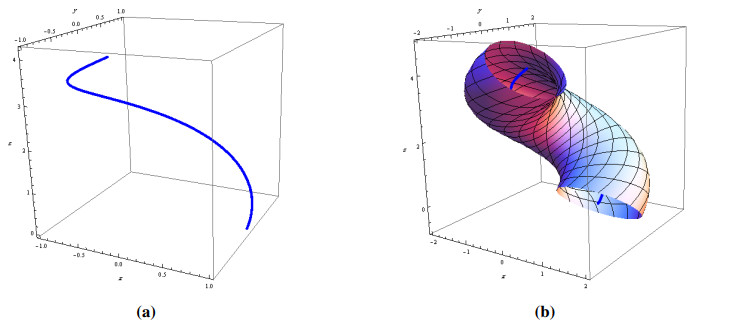
In this study, we examined the focal surfaces of tubular surfaces in Euclidean 3-space $ E^{3} $. We achieved some significant results for these surfaces in accordance with the modified orthogonal frame. Additionally, we proposed a few geometric invariants that illustrated the geometric characteristics of these surfaces, such as flat, minimal, Weingarten, and linear-Weingarten surfaces, using the traditional methods of differential geometry. Additionally, the asymptotic and geodesic curves of these surfaces have been researched. At last, we presented an example as an instance of use to validate our theoretical findings.
Citation: M. Khalifa Saad, Nural Yüksel, Nurdan Oğraş, Fatemah Alghamdi, A. A. Abdel-Salam. Geometry of tubular surfaces and their focal surfaces in Euclidean 3-space[J]. AIMS Mathematics, 2024, 9(5): 12479-12493. doi: 10.3934/math.2024610
In this study, we examined the focal surfaces of tubular surfaces in Euclidean 3-space $ E^{3} $. We achieved some significant results for these surfaces in accordance with the modified orthogonal frame. Additionally, we proposed a few geometric invariants that illustrated the geometric characteristics of these surfaces, such as flat, minimal, Weingarten, and linear-Weingarten surfaces, using the traditional methods of differential geometry. Additionally, the asymptotic and geodesic curves of these surfaces have been researched. At last, we presented an example as an instance of use to validate our theoretical findings.

| [1] |
H. Pottmann, H. Hagen, A. Divivier, Visualizing functions on a surface, J. Visual. Comput. Animat., 2 (1991), 52–58. http://dx.doi.org/10.1002/vis.4340020205 doi: 10.1002/vis.4340020205

|
| [2] | H. Hagen, S. Hahmann, Generalized focal surfaces: A new method for surface interrogation, In: Proceedings Visualization'92, 1992, 70–76. http://dx.doi.org/10.1109/VISUAL.1992.235224 |
| [3] |
H. Hagen, S. Hahmann, T. Schreiber, Y. Nakajima, B. Wordenweber, P. Hollemann-Grundstedt, Surface interrogation algorithms, IEEE Comput. Graph., 12 (1992), 53–60. http://dx.doi.org/10.1109/38.156013 doi: 10.1109/38.156013
|
| [4] | B. Özdemir, K. Arslan, On generalized focal surfaces in $E^3$, Rev. Bull. Calcutta Math. Soc., 16 (2008), 23–32. |
| [5] | G. Öztürk, K. Arslan, On focal curves in Euclidean n-space Rn, Novi. Sad. J. Math., 46 (2016), 35–44. |
| [6] |
S. Honda, M. Takahashi, Evolutes and focal surfaces of framed immersions in the Euclidean space, P. Roy. Soc. Edinb. A, 150 (2020), 497–516. http://dx.doi.org/10.1017/prm.2018.84 doi: 10.1017/prm.2018.84
|
| [7] |
S. Yurttançıkmaz, Ö. Tarakçı, The relationship between focal surfaces and surfaces at a constant distance from the edge of regression on a surface, Adv. Math. Phys., 2015 (2015), 397126. http://dx.doi.org/10.1155/2015/397126 doi: 10.1155/2015/397126
|
| [8] | S. Büyükkütük, İ. Kişi, G. Öztürk, Some characterizations of focal surfaces of a tubular surface in $E^{3}$, 2018. http://dx.doi.org/10.48550/arXiv.1810.05531 |
| [9] | İ. Kişi, G. Öztürk, A new study on focal surface of a given surface, Turk. J. Sci., 5 (2020), 208–213. |
| [10] |
T. Sasai, The fundamental theorem of analytic space curves and apparent singularities of Fuchsian differential equations, Tohoku Math. J., 36 (1984), 17–24. http://dx.doi.org/10.2748/tmj/1178228899 doi: 10.2748/tmj/1178228899
|
| [11] |
B. Bükçü, M. K. Karacan, On the modified orthogonal frame with curvature and torsion in 3-space, Math. Sci. Appl. E, 4 (2016), 184–188. http://dx.doi.org/10.36753/mathenot.421429 doi: 10.36753/mathenot.421429
|
| [12] | M. Dede, Tubular surfaces in Galilean space, Math. Commun., 18 (2013), 209–217. |
| [13] |
S. Gür, S. Şenyurt, M. Bektaş, Salkowski curves and their modified orthogonal frames in $E^{3}$, J. New Theor., 40 (2022), 12–26. http://dx.doi.org/10.53570/jnt.1140546 doi: 10.53570/jnt.1140546
|
| [14] |
M. S. Lone, H. Es, M. K. Karacan, B. Bükçü, On some curves with modified orthogonal frame in Euclidean 3-Space, Iran. J. Sci. Technol. Trans. Sci., 43 (2019), 1905–1916. http://dx.doi.org/10.1007/s40995-018-0661-2 doi: 10.1007/s40995-018-0661-2
|
| [15] | B. Bükçü, M. K. Karacan, Spherical curves with modified orthogonal frame, J. New Result. Sci., 5 (2016), 60–68. |
| [16] |
N. Yüksel, N. Oğraş, Canal surfaces with modified orthogonal frame in Minkowski 3-space, Acta Universitatis Apulensis, 70 (2022), 65–86. http://dx.doi.org/10.17114/j.aua.2022.70.07 doi: 10.17114/j.aua.2022.70.07
|
| [17] | F. Doğan, Y. Yaylı, Tubulars with Darboux frame, Int. J. Contemp. Math. Sci., 7 (2012), 751–758. |
| [18] |
F. Doğan, Y. Yaylı, On the curvatures of tubular surface with Bishop frame, Commun. Fac. Sci. Univ., 60 (2011), 59–69. http://dx.doi.org/10.1501/Commua1_0000000669 doi: 10.1501/Commua1_0000000669
|
| [19] | N. Yüksel, Y. Tuncer, M. K. Karacan, Tabular surfaces with Bishop frame of Weingarten types in Euclidean 3-space, Acta Universitatis Apulensis, 27 (2011), 39–50. |
| [20] |
Z. Xu, R. Feng, J. Sun, Analytic and algebraic properties of canal surfaces, J. Comput. Appl. Math., 195 (2006), 220–228. http://dx.doi.org/10.1016/j.cam.2005.08.002 doi: 10.1016/j.cam.2005.08.002
|
| [21] |
R. A. Abdel-Baky, M. Khalifa Saad, Singularities of non-developable ruled surface with space-like ruling, Symmetry, 14 (2022), 716. http://dx.doi.org/10.3390/sym14040716 doi: 10.3390/sym14040716
|
| [22] |
M. Peternell, H. Pottmann, Computing rational parametrizations of canal surfaces, J. Symb. Comput., 23 (1997), 255–266. http://dx.doi.org/10.1006/jsco.1996.0087 doi: 10.1006/jsco.1996.0087
|
| [23] | H. S. Abdel-Aziz, M. Khalifa Saad, Weingarten timelike tube surfaces around a spacelike curve, Int. J. Math. Anal., 5 (2011), 1225-1236. |
| [24] |
Y. H. Kim, H. Liu, J. Qian, Some characterizations of canal surfaces, B. Korean Math. Soc., 53 (2016), 461–477. http://dx.doi.org/10.4134/BKMS.2016.53.2.461 doi: 10.4134/BKMS.2016.53.2.461
|
| [25] | R. López, Linear Weingarten surfaces in Euclidean and hyperbolic space, 2009. http://dx.doi.org/10.48550/arXiv.0906.3302 |
Figures(2)

M. Khalifa Saad, Nural Yüksel, Nurdan Oğraş, Fatemah Alghamdi, A. A. Abdel-Salam. Geometry of tubular surfaces and their focal surfaces in Euclidean 3-space[J]. AIMS Mathematics, 2024, 9(5): 12479-12493. doi: 10.3934/math.2024610







 DownLoad:
DownLoad: