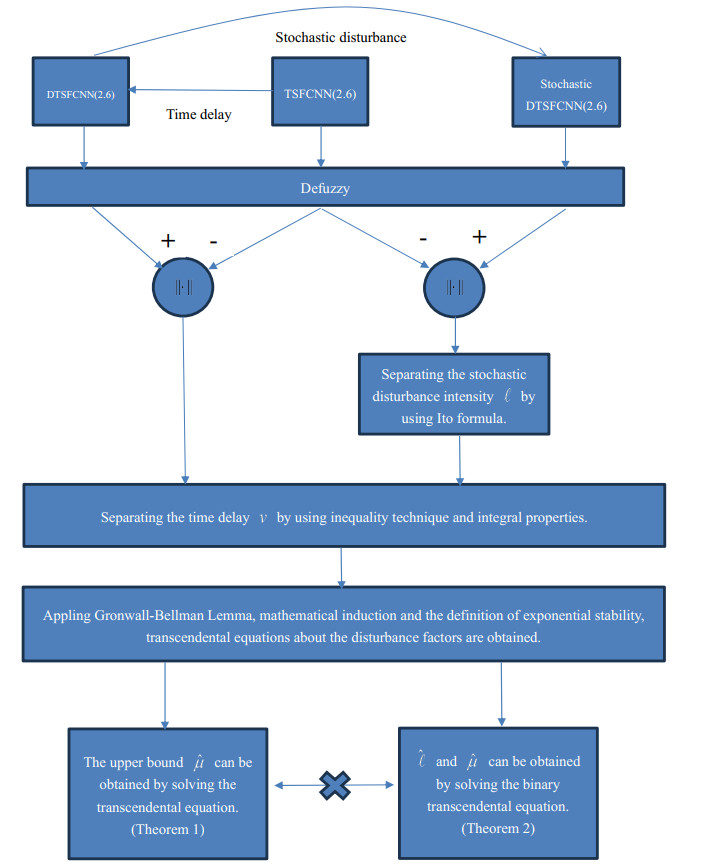
In this paper, inequality techniques, stochastic analysis and algebraic methods are used to analyze the robustness of the stability of recurrent neural networks containing Takagi-Sugeno fuzzy rules. By solving the transcendental equations, the upper bounds of time delay and noise intensity are given, and the dynamic relationship between the two disturbance factors is derived. Finally, numerical examples are given to verify the results of this paper.
Citation: Wenxiang Fang, Tao Xie. Robustness analysis of stability of Takagi-Sugeno type fuzzy neural network[J]. AIMS Mathematics, 2023, 8(12): 31118-31140. doi: 10.3934/math.20231593
In this paper, inequality techniques, stochastic analysis and algebraic methods are used to analyze the robustness of the stability of recurrent neural networks containing Takagi-Sugeno fuzzy rules. By solving the transcendental equations, the upper bounds of time delay and noise intensity are given, and the dynamic relationship between the two disturbance factors is derived. Finally, numerical examples are given to verify the results of this paper.

| [1] |
L. O. Chua, L. Yang, Cellular neural networks: Theory, IEEE Trans. Circuits Syst., 35 (1988), 1257–1272. https://doi.org/10.1109/31.7600 doi: 10.1109/31.7600

|
| [2] |
L. O. Chua, L. Yang, Cellular neural networks: Applications, IEEE Trans. Circuits Syst., 35 (1988), 1273–1290. https://doi.org/10.1109/31.7601 doi: 10.1109/31.7601
|
| [3] |
F. Musanna, D. Dangwal, S. Kumar, Novel image encryption algorithm using fractional chaos and cellular neural network, J. Ambient Intell. Human. Comput., 13 (2022), 2205–2226. https://doi.org/10.1007/s12652-021-02982-8 doi: 10.1007/s12652-021-02982-8
|
| [4] |
X. Hu, G. Feng, S. Duan, L. Liu, A memristive multilayer cellular neural network with applications to image processing, IEEE Trans. Neural Netw. Learn. Syst., 28 (2017), 1889–1901. https://doi.org/10.1109/TNNLS.2016.2552640 doi: 10.1109/TNNLS.2016.2552640
|
| [5] |
C. Xiu, R. Zhou, Y. Liu, New chaotic memristive cellular neural network and its application in secure communication system, Chaos Solitons Fractals, 141 (2020), 110316. https://doi.org/10.1016/j.chaos.2020.110316 doi: 10.1016/j.chaos.2020.110316
|
| [6] |
T. Takagi, M. Sugeno, Fuzzy identification of systems and its applications to modeling and control, IEEE Trans. Syst. Man Cybern., SMC-15 (1985), 116–132. https://doi.org/10.1109/TSMC.1985.6313399 doi: 10.1109/TSMC.1985.6313399
|
| [7] |
M. Syed Ali, P. Balasubramaniam, Global asymptotic stability of stochastic fuzzy cellular neural networks with multiple discrete and distributed time-varying delays, Commun. Nonlinear Sci. Numer. Simul., 16 (2011), 2907–2916. https://doi.org/10.1016/j.cnsns.2010.10.011 doi: 10.1016/j.cnsns.2010.10.011
|
| [8] |
Y. Liu, Y. Sun, Fixed-time synchronization of fuzzy cellular neural networks with time-varying delays and discontinuous activations, IEEE Access, 8 (2020), 65801–65811. https://doi.org/10.1109/ACCESS.2020.2985212 doi: 10.1109/ACCESS.2020.2985212
|
| [9] |
A. Singh, J. N. Rai, Stability of fractional order fuzzy cellular neural networks with distributed delays via hybrid feedback controllers, Neural Process. Lett., 53 (2021), 1469–1499. https://doi.org/10.1007/s11063-021-10460-7 doi: 10.1007/s11063-021-10460-7
|
| [10] |
A. Kumar, S. Das, V. K. Yadav, Rajeev, J. Cao, C. Huang, Synchronizations of fuzzy cellular neural networks with proportional time-delay, AIMS Mathematics, 6 (2021), 10620–10641. https://doi.org/10.3934/math.2021617 doi: 10.3934/math.2021617
|
| [11] |
W. Fang, T. Xie, B. Li, Robustness analysis of fuzzy BAM cellular neural network with time-varying delays and stochastic disturbances, AIMS Mathematics, 8 (2023), 9365–9384. https://doi.org/10.3934/math.2023471 doi: 10.3934/math.2023471
|
| [12] |
H. Li, Y. Kao, Y. Chen, Mittag-leffler stability of fractional-order nonlinear differential systems with state-dependent delays, IEEE Trans. Circuits Syst. I Regul. Pap., 69 (2022), 2108–2116. https://doi.org/10.1109/TCSI.2022.3142765 doi: 10.1109/TCSI.2022.3142765
|
| [13] |
B. Almarri, A. H. Ali, A. M. Lopes, O. Bazighifan, Nonlinear differential equations with distributed delay: Some new oscillatory solutions, Mathematics, 10 (2022), 995. https://doi.org/10.3390/math10060995 doi: 10.3390/math10060995
|
| [14] |
Y. Y. Hou, T. L. Liao, J. J. Yan, Stability analysis of Takagi-Sugeno fuzzy cellular neural networks with time-varying delays, IEEE Trans. Syst. Man Cybern. Part B Cybern., 37 (2007), 720–726. https://doi.org/10.1109/TSMCB.2006.889628 doi: 10.1109/TSMCB.2006.889628
|
| [15] |
P. Balasubramaniam, M. Syed Ali, S. Arik, Global asymptotic stability of stochastic fuzzy cellular neural networks with multiple time-varying delays, Expert Syst. Appl., 37 (2010), 7737–7744. https://doi.org/10.1016/j.eswa.2010.04.067 doi: 10.1016/j.eswa.2010.04.067
|
| [16] |
H. Yang, L. Sheng, Robust stability of uncertain stochastic fuzzy cellular neural networks, Neurocomputing, 73 (2009), 133–138. https://doi.org/10.1016/j.neucom.2009.02.021 doi: 10.1016/j.neucom.2009.02.021
|
| [17] |
S. Long, D. Xu, Global exponential p-stability of stochastic non-autonomous Takagi-Sugeno fuzzy cellular neural networks with time-varying delays and impulses, Fuzzy Sets Syst., 253 (2014), 82–100. https://doi.org/10.1016/j.fss.2013.11.012 doi: 10.1016/j.fss.2013.11.012
|
| [18] |
P. Balasubramaniam, V. Vembarasan, R. Rakkiyappan, Leakage delays in T-S fuzzy cellular neural networks, Neural Process. Lett., 33 (2011), 111–136. https://doi.org/10.1007/s11063-010-9168-3 doi: 10.1007/s11063-010-9168-3
|
| [19] |
Y. Shen, J. Wang, Robustness analysis of global exponential stability of recurrent neural networks in the presence of time delays and random disturbances, IEEE Trans. Neural Netw. Learn. Syst., 23 (2012), 87–96. https://doi.org/10.1109/TNNLS.2011.2178326 doi: 10.1109/TNNLS.2011.2178326
|
| [20] |
W. Si, T. Xie, B. Li, Robustness analysis of exponential stability of neutral-type nonlinear systems with multi-interference, IEEE Access, 9 (2021), 116015–116032. https://doi.org/10.1109/access.2021.3105521 doi: 10.1109/access.2021.3105521
|
| [21] |
W. Si, T. Xie, B. Li, Exploration on robustness of exponentially global stability of recurrent neural networks with neutral terms and generalized piecewise constant arguments, Discrete Dyn. Nat. Soc., 2021 (2021), 9941881. https://doi.org/10.1155/2021/9941881 doi: 10.1155/2021/9941881
|
| [22] |
W. Fang, T. Xie, B. Li, Robustness analysis of fuzzy cellular neural network with deviating argument and stochastic disturbances, IEEE Access, 11 (2023), 3717–3728. https://doi.org/10.1109/access.2023.3233946 doi: 10.1109/access.2023.3233946
|
| [23] |
T. Roska, L. O. Chua, Cellular neural networks with nonlinear and delay-type template elements, IEEE Int. Workshop Cell. Neural Netw. Appl., 1990, 12–25. https://doi.org/10.1109/CNNA.1990.207503 doi: 10.1109/CNNA.1990.207503
|
| [24] |
Q. Zhang, W. Fang, T. Xie, Robustness analysis of exponential synchronization in complex dynamic networks with random perturbations, AIMS Mathematics, 8 (2023), 20487–20509. https://doi.org/10.3934/math.20231044 doi: 10.3934/math.20231044
|

Figures(11) / Tables(1)

Wenxiang Fang, Tao Xie. Robustness analysis of stability of Takagi-Sugeno type fuzzy neural network[J]. AIMS Mathematics, 2023, 8(12): 31118-31140. doi: 10.3934/math.20231593







 DownLoad:
DownLoad: