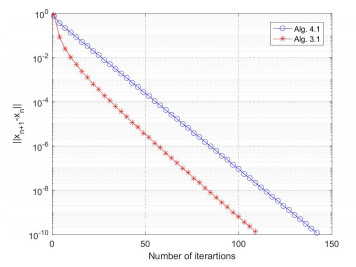
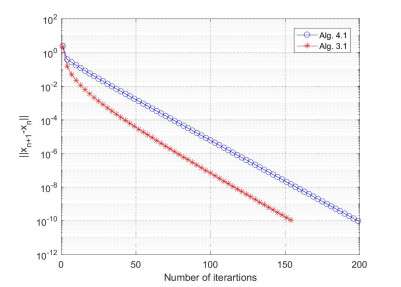
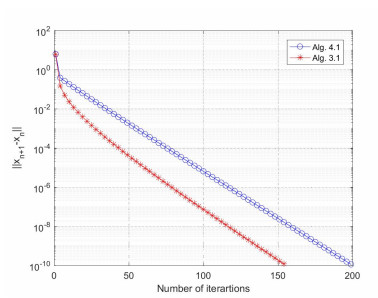
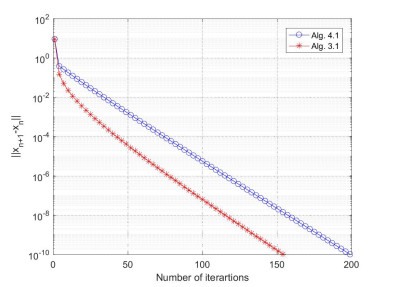
In this paper, we consider the variational inequality problem and the split common fixed point problem. Considering the common fixed points of an infinite family of nonexpansive mappings, instead of just the fixed point of one nonexpansive mapping, we generalize the results of Tian and Jiang. By removing a projection operator, we improve the efficiency of our algorithm. Finally, we propose a very simple modification to the extragradient method, which gives our algorithm strong convergence properties. We also provide some numerical examples to illustrate our main results.
Citation: Wenlong Sun, Gang Lu, Yuanfeng Jin, Zufeng Peng. Strong convergence theorems for split variational inequality problems in Hilbert spaces[J]. AIMS Mathematics, 2023, 8(11): 27291-27308. doi: 10.3934/math.20231396
In this paper, we consider the variational inequality problem and the split common fixed point problem. Considering the common fixed points of an infinite family of nonexpansive mappings, instead of just the fixed point of one nonexpansive mapping, we generalize the results of Tian and Jiang. By removing a projection operator, we improve the efficiency of our algorithm. Finally, we propose a very simple modification to the extragradient method, which gives our algorithm strong convergence properties. We also provide some numerical examples to illustrate our main results.

| [1] | G. Stampacchia, Formes bilineaires coercivites sur les ensembles convexes, C. R. Acad. Paris, 258 (1964), 4413–4416. |
| [2] |
B. F. Svaiter, A class of Fejer convergent algorithms, approximate resolvents and the hybrid proximal extragradient method, J. Optim. Theory Appl., 162 (2014), 133–153. https://doi.org/10.1007/s10957-013-0449-7 doi: 10.1007/s10957-013-0449-7

|
| [3] |
H. K. Xu, Averaged mappings and the gradient-projection algorithm, J. Optim. Theory Appl., 150 (2011), 36–378. https://doi.org/10.1007/s10957-011-9837-z doi: 10.1007/s10957-011-9837-z
|
| [4] |
L. J. Zhu, Y. H. Yao, Algorithms for approximating solutions of split variational inclusion and fixed point problems, Mathematics, 11 (2013), 641. https://doi.org/10.3390/math11030641 doi: 10.3390/math11030641
|
| [5] |
H. Zegeye, N. Shahzad, Y. Yao, Minimum-norm solution of variational inequality and fixed point problem in banach spaces, Optimization, 64 (2015), 453–471. https://doi.org/10.1080/02331934.2013.764522 doi: 10.1080/02331934.2013.764522
|
| [6] |
W. L. Sun, G. Lu, Y. F. Jin, C. Park, A unified framework for solving generalized variational inequalities, J. Math. Inequal., 16 (2022), 189–210. http://doi.org/10.7153/jmi-2022-16-15 doi: 10.7153/jmi-2022-16-15
|
| [7] | G. M. Korpelevich, The extragradient method for finding saddle points and for other problems, Matecon, 12 (1976), 747–756. |
| [8] | H. Rehman, P. Kumam, Y. J. Cho, P. Yordsorn, Weak convergence of explicit extragradient algorithms for solving equilibrium problems, J. Inequal. Appl., 2019 (2019), 282. |
| [9] |
H. Rehman, P. Kumam, Y. J. Cho, Y. I. Suleiman, W. Kumam, Modified popov's explicit iterative algorithms for solving pseudomonotone equilibrium problems, Optim. Method. Softw., 36 (2021), 82–113. https://doi.org/10.1080/10556788.2020.1734805 doi: 10.1080/10556788.2020.1734805
|
| [10] |
H. Rehman, P. Kumam, A. B. Abubakar, Y. J. Cho, The extragradient algorithm with inertial effects extended to equilibrium problems, Comput. Appl. Math., 39 (2020), 100. https://doi.org/10.1007/s40314-020-1093-0 doi: 10.1007/s40314-020-1093-0
|
| [11] |
H. Rehman, P. Kumam, M. Shutaywi, N. A. Alreshidi, W. Kumam, Inertial optimization based two-step methods for solving equilibrium problems with applications in variational inequality problems and growth control equilibrium models, Energies, 13 (2020), 3932. https://doi.org/10.3390/en13123292 doi: 10.3390/en13123292
|
| [12] |
H. Rehman, P. Kumam, Q. L. Dong, Y. Peng, W. Deebani, A new Popov's subgradient extragradient method for two classes of equilibrium programming in a real Hilbert space, Optimization, 70 (2020), 2675–2710. https://doi.org/10.1080/02331934.2020.1797026 doi: 10.1080/02331934.2020.1797026
|
| [13] | H. Iiduka, W. Takahashi, M. Toyoda, Approximation of solutions of variational inequalities for monotone mappings, Panamer. Math. J., 14 (2004), 49–61. |
| [14] |
Y. Censor, A. Gibali, S. Reich, S. Sabach, Common solutions to variational inequalities, Set Valued Var. Anal., 20 (2012), 229–247. https://doi.org/10.1007/s11228-011-0192-x doi: 10.1007/s11228-011-0192-x
|
| [15] |
Y. Censor, A. Gibali, S. Reich, Extensions of Korpelevich's extragradient method for the variational inequality problem in Euclidean space, Optimization, 61 (2012), 1119–1132. https://doi.org/10.1080/02331934.2010.539689 doi: 10.1080/02331934.2010.539689
|
| [16] | W. Takahashi, Introduction to nonlinear and convex analysis, Yokohama: Yokohama Publishers, 2009. |
| [17] |
H. Zhou, Y. Zhou, G. Feng, Iterative methods for solving a class of monotone variational inequality problems with applications, J. Inequal. Appl., 2015 (2015), 68. https://doi.org/10.1186/s13660-015-0590-y doi: 10.1186/s13660-015-0590-y
|
| [18] | Y. Censor, A. Segal, The split common fixed point problem for directed operators, J. Convex. Anal., 16 (2019), 587–600. |
| [19] | Q. H. Ansari, A. Rehan, C. F. Wen, Implicit and explicit algorithms for split common fixed point problems, J. Nonlinear. Convex Anal., 17 (2016), 1381–1397. |
| [20] |
O. A. Boikanyo, A strongly convergent algorithm for the split common fixed point problem, Appl. Math. Comput., 265 (2015), 844–853. https://doi.org/10.1016/j.amc.2015.05.130 doi: 10.1016/j.amc.2015.05.130
|
| [21] | Q. L. Dong, L. Liu, Y. Yao, Self-adaptive projection and contraction methods with alternated inertial terms for solving the split feasibility problem, J. Nonlinear Convex Anal., 23 (2022), 591–605. |
| [22] | W. L. Sun, G. Lu, Y. F. Jin, C. Park, Self-adaptive algorithms for the split problem of the quasi-pseudocontractive operators in Hilbert spaces, AIMS Mathematics, 7 (2022), 8715–8732. http://doi.org/2010.3934/math.2022487 |
| [23] |
Y. Censor, A. Gibali, S. Reich, Algorithms for the split variational inequality problem, Numer. Algorithms, 59 (2012), 301–323. http://doi.org/10.1007/s11075-011-9490-5 doi: 10.1007/s11075-011-9490-5
|
| [24] |
M. Tian, B. N. Jiang, Weak convergence theorem for a class of split variational inequality problems and applications in a Hilbert space, J. Inequal. Appl., 2017 (2017), 123. http://doi.org/10.1186/s13660-017-1397-9 doi: 10.1186/s13660-017-1397-9
|
| [25] | K. Goebel, S. Reich, Uniform convexity, hyperbolic geometry, and nonexpansive mappings, Marcel Dekker, 1984. |
| [26] |
K. Shimoji, W. Takahashi, Strong convergence to common fixed points of infinite nonexpasnsive mappings and applications, Taiwanese J. Math., 5 (2001), 387–404. http://doi.org/10.11650/twjm/1500407345 doi: 10.11650/twjm/1500407345
|
| [27] |
H. K. Xu, Iterative algorithms for nonlinear operators, J. Lond. Math. Soc., 66 (2002), 240–256. https://doi.org/10.1112/S0024610702003332 doi: 10.1112/S0024610702003332
|
| [28] |
P. E. Maingé, Approximation methods for common fixed points of nonexpansive mappings in Hilbert spaces, J. Math. Anal. Appl., 325 (2007), 469–479. https://doi.org/10.1016/j.jmaa.2005.12.066 doi: 10.1016/j.jmaa.2005.12.066
|
| [29] | H. H. Bauschke, P. L. Combettes, Convex analysis and monotone operator theory in Hilbert spaces, New York: Springer, 2011. https://doi.org/10.1007/978-1-4419-9467-7 |
| [30] | L. J. Zhang, J. M. Chen, Z. B. Hou, Viscosity approximation methods for nonexpansive mappings and generalized variational inequalities, Acta Math. Sin., 53 (2010), 691–698. |
Figures(5) / Tables(2)

Wenlong Sun, Gang Lu, Yuanfeng Jin, Zufeng Peng. Strong convergence theorems for split variational inequality problems in Hilbert spaces[J]. AIMS Mathematics, 2023, 8(11): 27291-27308. doi: 10.3934/math.20231396







 DownLoad:
DownLoad: