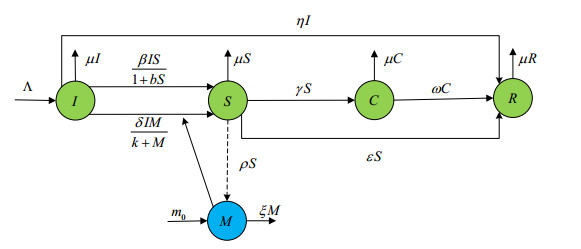
Modern social networks are especially beneficial for spreading rumors since they perform as multichannel communication platforms. The spread of false information has a detrimental impact on people, communities, and businesses. Media reports significantly affect rumor propagation by providing inhibiting factors. In this paper, we propose a new ISCRM fractional-order model to analyze the law of rumor propagation and provide appropriate control strategies. First, under fractional differential equations, the boundedness and non-negativeness of the solutions are obtained. Second, the local and global asymptotic stability of the rumor-free equilibrium and rumor-permanence equilibrium are proved. Third, employing Pontryagin's maximum principle, the conditions necessary for fractional optimum control are derived for the rumor model, and the optimal solutions are analyzed. Finally, several numerical simulations are presented to verify the accuracy of the theoretical results. For instance, while media reports can mitigate the propagation of rumors across various dynamic regions, they are unable to completely restrain rumor spread.
Citation: Xuefeng Yue, Weiwei Zhu. The dynamics and control of an ISCRM fractional-order rumor propagation model containing media reports[J]. AIMS Mathematics, 2024, 9(4): 9721-9745. doi: 10.3934/math.2024476
Modern social networks are especially beneficial for spreading rumors since they perform as multichannel communication platforms. The spread of false information has a detrimental impact on people, communities, and businesses. Media reports significantly affect rumor propagation by providing inhibiting factors. In this paper, we propose a new ISCRM fractional-order model to analyze the law of rumor propagation and provide appropriate control strategies. First, under fractional differential equations, the boundedness and non-negativeness of the solutions are obtained. Second, the local and global asymptotic stability of the rumor-free equilibrium and rumor-permanence equilibrium are proved. Third, employing Pontryagin's maximum principle, the conditions necessary for fractional optimum control are derived for the rumor model, and the optimal solutions are analyzed. Finally, several numerical simulations are presented to verify the accuracy of the theoretical results. For instance, while media reports can mitigate the propagation of rumors across various dynamic regions, they are unable to completely restrain rumor spread.

| [1] |
A. Bodaghi, S. Goliaei, M. Salehi, The number of followings as an influential factor in rumor spreading, Appl. Math. Comput., 357 (2019), 167–184. https://doi.org/10.1016/j.amc.2019.04.005 doi: 10.1016/j.amc.2019.04.005

|
| [2] |
S. Z. Yu, Z. Y. Yu, H. J. Jiang, S. Yang, The dynamics and control of 2I2SR rumor spreading models in multilingual online social networks, Inform. Sci., 581 (2021), 18–41. https://doi.org/10.1016/j.ins.2021.08.096 doi: 10.1016/j.ins.2021.08.096
|
| [3] |
P. Luo, C. X. Wang, F. Guo, L. Luo, Factors affecting individual online rumor sharing behavior in the COVID-19 pandemic, Comput. Human Behav., 125 (2021), 106968. https://doi.org/10.1016/j.chb.2021.106968 doi: 10.1016/j.chb.2021.106968
|
| [4] |
D. J. Daley, D. G. Kendall, Epidemics and rumours, Nature, 204 (1964), 1118. https://doi.org/10.1038/2041118a0 doi: 10.1038/2041118a0
|
| [5] | D. P. Maki, Mathematical models and applications: with emphasis on the social, life, and management sciences, Upper Saddle River, NJ, USA: Prentice-Hall, 1973. |
| [6] |
D. H. Zanette, Dynamics of rumor propagation on small-world networks, Phys. Rev. E, 65 (2002), 041908. https://doi.org/10.1103/PhysRevE.65.041908 doi: 10.1103/PhysRevE.65.041908
|
| [7] |
Y. Moreno, M. Nekovee, A. F. Pacheco, Dynamics of rumor spreading in complex networks, Phys. Rev. E, 69 (2004), 066130. https://doi.org/10.1103/PhysRevE.69.066130 doi: 10.1103/PhysRevE.69.066130
|
| [8] |
L. L. Xia, G. P. Jiang, B. Song, Y. R. Song, Rumor spreading model considering hesitating mechanism in complex social networks, Phys. A, 437 (2015), 295–303. https://doi.org/10.1016/j.physa.2015.05.113 doi: 10.1016/j.physa.2015.05.113
|
| [9] |
W. K. Chen, H. Zhang, P. Georgescu, T. Li, B. Zhang, Taming obstinate spreaders: the dynamics of a rumor spreading model incorporating inhibiting mechanisms and attitude adjustment, Comput. Appl. Math., 40 (2021), 125. https://doi.org/10.1007/s40314-021-01492-9 doi: 10.1007/s40314-021-01492-9
|
| [10] |
T. Y. Yuan, G. Guan, S. L. Shen, L. H. Zhu, Stability analysis and optimal control of epidemic-like transmission model with nonlinear inhibition mechanism and time delay in both homogeneous and heterogeneous networks, J. Math. Anal. Appl., 526 (2023), 127273. https://doi.org/10.1016/j.jmaa.2023.127273 doi: 10.1016/j.jmaa.2023.127273
|
| [11] |
L. H. Zhu, W. S. Liu, Z. D. Zhang, Delay differential equations modeling of rumor propagation in both homogeneous and heterogeneous networks with a forced silence function, Appl. Math. Comput., 370 (2020), 124925. https://doi.org/10.1016/j.amc.2019.124925 doi: 10.1016/j.amc.2019.124925
|
| [12] |
S. Z. Yu, Z. Y. Yu, H. J. Jiang, X. H. Mei, J. R. Li, The spread and control of rumors in a multilingual environment, Nonlinear Dyn., 100 (2020), 2933–2951. https://doi.org/10.1007/s11071-020-05621-7 doi: 10.1007/s11071-020-05621-7
|
| [13] |
Y. Y. Cheng, L. A. Huo, L. J. Zhao, Stability analysis and optimal control of rumor spreading model under media coverage considering time delay and pulse vaccination, Chaos Solitons Fract., 157 (2022), 111931. https://doi.org/10.1016/j.chaos.2022.111931 doi: 10.1016/j.chaos.2022.111931
|
| [14] |
L. A. Huo, L. Wang, X. M. Zhao, Stability analysis and optimal control of a rumor spreading model with media report, Phys. A, 517 (2019), 551–562. https://doi.org/10.1016/j.physa.2018.11.047 doi: 10.1016/j.physa.2018.11.047
|
| [15] |
W. Q. Pan, W. J. Yan, Y. H. Hu, R. M. He, L. B. Wu, Dynamic analysis of a SIDRW rumor propagation model considering the effect of media reports and rumor refuters, Nonlinear Dyn., 111 (2023), 3925–3936. https://doi.org/10.1007/s11071-022-07947-w doi: 10.1007/s11071-022-07947-w
|
| [16] |
H. M. Guo, X. F. Yan, Dynamic modeling and simulation of rumor propagation based on the double refutation mechanism, Inform. Sci., 630 (2023), 385–402. https://doi.org/10.1016/j.ins.2022.10.095 doi: 10.1016/j.ins.2022.10.095
|
| [17] |
H. M. Guo, X. F. Yan, Y. B. Niu, J. P. Zhang, Dynamic analysis of rumor propagation model with media report and time delay on social networks, J. Appl. Math. Comput., 69 (2023), 2473–2502. https://doi.org/10.1007/s12190-022-01829-5 doi: 10.1007/s12190-022-01829-5
|
| [18] |
M. Saeedian, M. Khalighi, N. Azimi-Tafreshi, G. R. Jafari, M. Ausloos, Memory effects on epidemic evolution: the susceptible-infected-recovered epidemic model, Phys. Rev. E, 95 (2017), 022409. https://doi.org/10.1103/PhysRevE.95.022409 doi: 10.1103/PhysRevE.95.022409
|
| [19] |
G. González-Parra, A. J. Arenas, B. M. Chen-Charpentier, A fractional order epidemic model for the simulation of outbreaks of influenza A(H1N1), Math. Methods Appl. Sci., 37 (2014), 2218–2226. https://doi.org/10.1002/mma.2968 doi: 10.1002/mma.2968
|
| [20] |
F. Alzahrani, O. A. Razzaq, D. U. Rehman, N. A. Khan, A. S. Alshomrani, M. Z. Ullah, Repercussions of unreported populace on disease dynamics and its optimal control through system of fractional order delay differential equations, Chaos Solitons Fract., 158 (2022), 111997. https://doi.org/10.1016/j.chaos.2022.111997 doi: 10.1016/j.chaos.2022.111997
|
| [21] |
H. Kheiri, M. Jafari, Stability analysis of a fractional order model for the HIV/AIDS epidemic in a patchy environment, J. Comput. Appl. Math., 346 (2019), 323–339. https://doi.org/10.1016/j.cam.2018.06.055 doi: 10.1016/j.cam.2018.06.055
|
| [22] |
H. M. Ali, I. G. Ameen, Optimal control strategies of a fractional order model for Zika virus infection involving various transmissions, Chaos Solitons Fract., 146 (2021), 110864. https://doi.org/10.1016/j.chaos.2021.110864 doi: 10.1016/j.chaos.2021.110864
|
| [23] |
J. J. Huo, H. Y. Zhao, Dynamical analysis of a fractional SIR model with birth and death on heterogeneous complex networks, Phys. A, 448 (2016), 41–56. https://doi.org/10.1016/j.physa.2015.12.078 doi: 10.1016/j.physa.2015.12.078
|
| [24] |
E. O. Alzahrani, M. A. Khan, Modeling the dynamics of Hepatitis E with optimal control, Chaos Solitons Fract., 116 (2018), 287–301. https://doi.org/10.1016/j.chaos.2018.09.033 doi: 10.1016/j.chaos.2018.09.033
|
| [25] |
X. S. Cui, D. Y. Xue, F. Pan, Dynamic analysis and optimal control for a fractional-order delayed SIR epidemic model with saturated treatment, Eur. Phys. J. Plus, 137 (2022), 1–18. https://doi.org/10.1140/epjp/s13360-022-02810-8 doi: 10.1140/epjp/s13360-022-02810-8
|
| [26] |
X. H.Wang, Z. Wang, X. Huang, Y. X. Li, Dynamic analysis of a delayed fractional-order SIR model with saturated incidence and treatment functions, Int. J. Bifur. Chaos, 28 (2018), 1850180. https://doi.org/10.1142/S0218127418501808 doi: 10.1142/S0218127418501808
|
| [27] |
M. R. Sidi Ammi, M. Tahiri, D. F. M. Torres, Global stability of a Caputo fractional SIRS model with general incidence rate, Math. Comput. Sci., 15 (2021), 91–105. https://doi.org/10.1007/s11786-020-00467-z doi: 10.1007/s11786-020-00467-z
|
| [28] |
Z. A. Khan, A. L. Alaoui, A. Zeb, M. Tilioua, S. Djilali, Global dynamics of a SEI epidemic model with immigration and generalized nonlinear incidence functional, Results Phys., 27 (2021), 104477. https://doi.org/10.1016/j.rinp.2021.104477 doi: 10.1016/j.rinp.2021.104477
|
| [29] |
M. B. Ghori, P. A. Naik, J. Zu, Z. Eskandari, M. Naik, Global dynamics and bifurcation analysis of a fractional-order SEIR epidemic model with saturation incidence rate, Math. Methods Appl. Sci., 45 (2022), 3665–3688. https://doi.org/10.1002/mma.8010 doi: 10.1002/mma.8010
|
| [30] |
M. Naim, F. Lahmidi, A. Namir, A. Kouidere, Dynamics of an fractional SEIR epidemic model with infectivity in latent period and general nonlinear incidence rate, Chaos Solitons Fract., 152 (2021), 111456. https://doi.org/10.1016/j.chaos.2021.111456 doi: 10.1016/j.chaos.2021.111456
|
| [31] |
R. K. Upadhyay, A. K. Pal, S. Kumari, P. Roy, Dynamics of an SEIR epidemic model with nonlinear incidence and treatment rates, Nonlinear Dyn., 96 (2019), 2351–2368. https://doi.org/10.1007/s11071-019-04926-6 doi: 10.1007/s11071-019-04926-6
|
| [32] |
X. Liu, M. Arfan, M. Ur Rahman, B. Fatima, Analysis of SIQR type mathematical model under Atangana-Baleanu fractional differential operator, Comput. Methods Biomech. Biomed. Eng., 26 (2023), 98–112. https://doi.org/10.1080/10255842.2022.2047954 doi: 10.1080/10255842.2022.2047954
|
| [33] |
X. Liu, K. Zhao, J. L. Wang, H. T. Chen, Stability analysis of a SEIQRS epidemic model on the finite scale-free network, Fractals, 30 (2022), 2240054. https://doi.org/10.1142/S0218348X22400540 doi: 10.1142/S0218348X22400540
|
| [34] |
J. Singh, A new analysis for fractional rumor spreading dynamical model in a social network with Mittag-Leffler law, Chaos, 29 (2019), 013137. https://doi.org/10.1063/1.5080691 doi: 10.1063/1.5080691
|
| [35] |
M. L. Ye, J. R. Li, X. Han, H. J. Jiang, Global analysis of a fractional-order reaction-diffusion rumor-spreading model in multi-lingual environment, Eur. Phys. J. Plus, 138 (2023), 102. https://doi.org/10.1140/epjp/s13360-023-03698-8 doi: 10.1140/epjp/s13360-023-03698-8
|
| [36] | I. Podlubny, Fractional differential equations, Academic Press, 1999. |
| [37] | A. A. Kilbas, O. I. Marichev, S. G. Samko, Fractional integrals and derivatives (theory and applications), Switzerland: Gordon and Breach, 1993. |
| [38] |
Y. Li, Y. Q. Chen, I. Podlubny, Mittag-Leffler stability of fractional order nonlinear dynamic systems, Automatica, 45 (2009), 1965–1969. https://doi.org/10.1016/j.automatica.2009.04.003 doi: 10.1016/j.automatica.2009.04.003
|
| [39] |
L. H. Zhu, B. X. Wang, Stability analysis of a SAIR rumor spreading model with control strategies in online social networks, Inform. Sci., 526 (2020), 1–19. https://doi.org/10.1016/j.ins.2020.03.076 doi: 10.1016/j.ins.2020.03.076
|
| [40] |
H. L. Li, L. Zhang, C. Hu, Y. L. Jiang, Z. D. Teng, Dynamical analysis of a fractional-order predator-prey model incorporating a prey refuge, J. Appl. Math. Comput., 54 (2017), 435–449. https://doi.org/10.1007/s12190-016-1017-8 doi: 10.1007/s12190-016-1017-8
|
| [41] |
P. Van Den Driessche, J. Watmough, Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission, Math. Biosci., 180 (2002), 29–48. https://doi.org/10.1016/S0025-5564(02)00108-6 doi: 10.1016/S0025-5564(02)00108-6
|
| [42] |
E. X. DeJesus, C. Kaufman, Routh-Hurwitz criterion in the examination of eigenvalues of a system of nonlinear ordinary differential equations, Phys. Rev. A, 35 (1987), 5288. https://doi.org/10.1103/PhysRevA.35.5288 doi: 10.1103/PhysRevA.35.5288
|
| [43] |
J. P. Hespanha, Uniform stability of switched linear systems: extensions of LaSalle's invariance principle, IEEE Trans. Automat. Control, 49 (2004), 470–482. https://doi.org/10.1109/TAC.2004.825641 doi: 10.1109/TAC.2004.825641
|
| [44] | L. S. Pontryagin, The mathematical theory of optimal processes, London: Routledge, 2018. https://doi.org/10.1201/9780203749319 |
| [45] |
T. Roshan, S. Ghosh, R. P. Chauhan, S. Kumar, A robust study on fractional order HIV/AIDS model by using numerical methods, Eng. Comput., 40 (2023), 1545–1569. https://doi.org/10.1108/EC-10-2022-0626 doi: 10.1108/EC-10-2022-0626
|
| [46] |
B. W. Cao, G. Guan, S. L. Shen, L. H. Zhu, Dynamical behaviors of a delayed SIR information propagation model with forced silence function and control measures in complex networks, Eur. Phys. J. Plus, 138 (2023), 402. https://doi.org/10.1140/epjp/s13360-023-04005-1 doi: 10.1140/epjp/s13360-023-04005-1
|
| [47] |
X. R. Tong, H. J. Jiang, X. Y. Chen, J. R. Li, Z. Cao, Deterministic and stochastic evolution of rumor propagation model with media coverage and class-age-dependent education, Math. Methods Appl. Sci., 46 (2023), 7125–7139. https://doi.org/10.1002/mma.8959 doi: 10.1002/mma.8959
|
| [48] |
X. R. Tong, H. J. Jiang, J. L. Qiu, X. P. Luo, S. S. Chen, Dynamic analysis of the IFCD rumor propagation model under stochastic disturbance on heterogeneous networks, Chaos Solitons Fract., 173 (2023), 113637. https://doi.org/10.1016/j.chaos.2023.113637 doi: 10.1016/j.chaos.2023.113637
|




Figures(5) / Tables(2)

Xuefeng Yue, Weiwei Zhu. The dynamics and control of an ISCRM fractional-order rumor propagation model containing media reports[J]. AIMS Mathematics, 2024, 9(4): 9721-9745. doi: 10.3934/math.2024476







 DownLoad:
DownLoad: