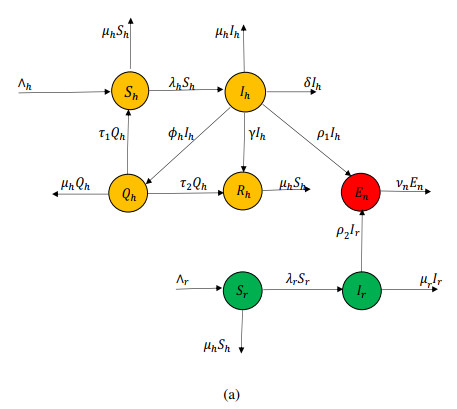
Monkeypox is an emerging zoonotic viral disease resembling that of smallpox, although it is clinically less severe. Following the COVID-19 outbreak, monkeypox is an additional global health concern. The present study aims to formulate a novel mathematical model to examine various epidemiological aspects and to suggest optimized control strategies for the ongoing outbreak. The environmental viral concentration plays an important role in disease incidence. Therefore, in this study, we consider the impact of the environmental viral concentration on disease dynamics and control. The model is first constructed with constant control measures.The basic mathematical properties including equilibria, stability, and reproduction number of the monkeypox model are presented. Furthermore, using the nonlinear least square method, we estimate the model parameters from the actual cases reported in the USA during a recent outbreak in 2022. Normalized sensitivity analysis is performed to develop the optimal control problem. Based on the sensitivity indices of the model parameters, the model is reformulated by introducing six control variables. Based on theoretical and simulation results, we conclude that considering all suggested control measures simultaneously is the effective and optimal strategy to curtail the infection. We believe that the outcomes of this study will be helpful in understanding the dynamics and prevention of upcoming monkeypox outbreaks.
Citation: Ahmed Alshehri, Saif Ullah. Optimal control analysis of Monkeypox disease with the impact of environmental transmission[J]. AIMS Mathematics, 2023, 8(7): 16926-16960. doi: 10.3934/math.2023865
Monkeypox is an emerging zoonotic viral disease resembling that of smallpox, although it is clinically less severe. Following the COVID-19 outbreak, monkeypox is an additional global health concern. The present study aims to formulate a novel mathematical model to examine various epidemiological aspects and to suggest optimized control strategies for the ongoing outbreak. The environmental viral concentration plays an important role in disease incidence. Therefore, in this study, we consider the impact of the environmental viral concentration on disease dynamics and control. The model is first constructed with constant control measures.The basic mathematical properties including equilibria, stability, and reproduction number of the monkeypox model are presented. Furthermore, using the nonlinear least square method, we estimate the model parameters from the actual cases reported in the USA during a recent outbreak in 2022. Normalized sensitivity analysis is performed to develop the optimal control problem. Based on the sensitivity indices of the model parameters, the model is reformulated by introducing six control variables. Based on theoretical and simulation results, we conclude that considering all suggested control measures simultaneously is the effective and optimal strategy to curtail the infection. We believe that the outcomes of this study will be helpful in understanding the dynamics and prevention of upcoming monkeypox outbreaks.

| [1] | World Health Organization, Monkeypox, 2022. Available from: http: /www.who.int/en/news-room/fact-sheets/detail/monkeypox. |
| [2] |
D. Bisanzio, R. Reithinger, Projected burden and duration of the 2022 Monkeypox outbreaks in non-endemic countries, Lancet Microbe, 3 (2022), e643. https://doi.org/10.1016/S2666-5247(22)00183-5 doi: 10.1016/S2666-5247(22)00183-5

|
| [3] |
K. N. Durski, A. M. McCollum, Y. Nakazawa, B. W. Petersen, M. G. Reynolds, S. Briand, et al., Emergence of monkeypox–West and central Africa, 1970–2017, Morbid. Mortal Wkly Rep., 67 (2018), 306–310. https://doi.org/10.15585/mmwr.mm6710a5 doi: 10.15585/mmwr.mm6710a5
|
| [4] | Z. Jezek, M. Szczeniowski, K. M. Paluku, M. Mutombo, B. Grab, Human monkeypox: confusion with chickenpox, Acta Trop., 45 (1988), 297–307. |
| [5] |
E. Alakunle, U. Moens, G. Nchinda, M. I. Okeke, Monkeypox virus in Nigeria: infection biology, epidemiology, and evolution, Viruses, 12 (2020), 1257. https://doi.org/10.3390/v12111257 doi: 10.3390/v12111257
|
| [6] | Centers for Disease Control and Prevention, Monkeypox Vaccination Basics, 2023. Available from: https://www.cdc.gov/poxvirus/mpox/vaccines/index.html. |
| [7] |
T. Li, Y. Guo, Optimal control and cost-effectiveness analysis of a new COVID-19 model for Omicron strain, Phys. A: Stat. Mech. Appls., 606 (2022), 128134. https://doi.org/10.1016/j.physa.2022.128134 doi: 10.1016/j.physa.2022.128134
|
| [8] |
P. A. Naik, J. Zu, M. B. Ghori, M. Naik, Modeling the effects of the contaminated environments on COVID-19 transmission in India, Results Phys., 29 (2021), 104774. https://doi.org/10.1016/j.rinp.2021.104774 doi: 10.1016/j.rinp.2021.104774
|
| [9] |
P. A. Naik, J. Zu, K. M. Owolabi, Global dynamics of a fractional order model for the transmission of HIV epidemic with optimal control, Chaos Solitons Fract., 138 (2020), 109826. https://doi.org/10.1016/j.chaos.2020.109826 doi: 10.1016/j.chaos.2020.109826
|
| [10] |
A. Ahmad, M. Farman, P. A. Naik, N. Zafar, A. Akgul, M. U. Saleem, Modeling and numerical investigation of fractional-order bovine babesiosis disease, Numer. Meth. Part. Differ. Equ., 37 (2021), 1946–1964. https://doi.org/10.1002/num.22632 doi: 10.1002/num.22632
|
| [11] |
S. A. Somma, N. I. Akinwande, U. D. Chado, A mathematical model of monkey pox virus transmission dynamics, Ife J. Sci., 21 (2019), 195–204. https://doi.org/10.4314/ijs.v21i1.17 doi: 10.4314/ijs.v21i1.17
|
| [12] |
N. O. Lasisi, N. I. Akinwande, F. A. Oguntolu, Development and exploration of a mathematical model for transmission of monkey-pox disease in humans, Math. Model. Eng., 6 (2020), 23–33. https://doi.org/10.21595/mme.2019.21234 doi: 10.21595/mme.2019.21234
|
| [13] |
S. Usman, I. I. Adamu, Modeling the transmission dynamics of the monkeypox virus infection with treatment and vaccination interventions, J. Appl. Math. Phys., 5 (2017), 2335–2353. https://doi.org/10.4236/jamp.2017.512191 doi: 10.4236/jamp.2017.512191
|
| [14] |
P. C. Emeka, M. O. Ounorah, F. Y. Eguda, B. G. Babangida, Mathematical model for monkeypox virus transmission dynamics, Epidemiology, 8 (2018), 348. https://doi.org/10.4172/2161-1165.1000348 doi: 10.4172/2161-1165.1000348
|
| [15] |
O. J. Peter, S. Kumar, N. Kumari, F. A. Oguntolu, K. Oshinubi, R. Musa, Transmission dynamics of Monkeypox virus: a mathematical modelling approach, Model. Earth Syst. Environ., 8 (2022), 3423–3434. https://doi.org/10.1007/s40808-021-01313-2 doi: 10.1007/s40808-021-01313-2
|
| [16] |
A. M. Alzubaidi, H. A. Othman, S. Ullah, N. Ahmad, M. M. Alam, Analysis of Monkeypox viral infection with human to animal transmission via a fractional and Fractal-fractional operators with power law kernel, Math. Biosci. Eng., 20 (2023), 6666–6690. https://doi.org/10.3934/mbe.2023287 doi: 10.3934/mbe.2023287
|
| [17] |
C. Madubueze, I. O. O. Onwubuyq, G. N. Nkem, Z. Chazuka, On the transmission dynamics of the monkeypox virus in the presence of environmental transmission, Front. Appl. Math. Stat., 28 (2022), 1–21. https://doi.org/10.3389/fams.2022.1061546 doi: 10.3389/fams.2022.1061546
|
| [18] |
Y. Guo, T. Li, Dynamics and optimal control of an online game addiction model with considering family education, AIMS Math., 7 (2022), 3745–3770. https://doi.org/10.3934/math.2022208 doi: 10.3934/math.2022208
|
| [19] |
J. K. Asamoah, Z. Jin, G. Q. Sun, B. Seidu, E. Yankson, A. Abidemi, et al., Sensitivity assessment and optimal economic evaluation of a new COVID-19 compartmental epidemic model with control interventions, Chaos Solitons Fract., 146 (2021), 110885. https://doi.org/10.1016/j.chaos.2021.110885 doi: 10.1016/j.chaos.2021.110885
|
| [20] |
J. K. K. Asamoah, E. Okyere, A. Abidemi, S. E. Moore, G. Q. Sun, Z. Jin, et al., Optimal control and comprehensive cost-effectiveness analysis for COVID-19, Results Phys., 33 (2022), 105177. https://doi.org/10.1016/j.rinp.2022.105177 doi: 10.1016/j.rinp.2022.105177
|
| [21] |
Y. Guo, T. Li, Modeling and dynamic analysis of novel coronavirus pneumonia (COVID-19) in China, J. Appl. Math. Comput., 68 (2022), 2641–2666. https://doi.org/10.1007/s12190-021-01611-z doi: 10.1007/s12190-021-01611-z
|
| [22] |
S. Majee, S. Jana, T. K. Kar, Dynamical analysis of monkeypox transmission incorporating optimal vaccination and treatment with cost-effectiveness, Chaos, 33 (2023), 043103. https://doi.org/10.1063/5.0139157 doi: 10.1063/5.0139157
|
| [23] |
J. K. Asamoah, Z. Jin, G. Q. Sun, Non-seasonal and seasonal relapse model for Q fever disease with comprehensive cost-effectiveness analysis, Results Phys., 22 (2021), 103889. https://doi.org/10.1016/j.rinp.2021.103889 doi: 10.1016/j.rinp.2021.103889
|
| [24] |
T. Berge, M. Chapwanya, J. S. Lubuma, Y. Terefe, A mathematical model for Ebola epidemic with self-protection measures, J. Biol. Syst., 26 (2018), 107–131. https://doi.org/10.1142/S0218339018500067 doi: 10.1142/S0218339018500067
|
| [25] |
J. P. Tian, J. Wang, Global stability for cholera epidemic models, Math. Biosci., 232 (2011), 31–41. https://doi.org/10.1016/j.mbs.2011.04.001 doi: 10.1016/j.mbs.2011.04.001
|
| [26] | United States Population, 2022. Available from: https://www.worldometers.info/world-population/us-population/. |
| [27] |
P. van den Driessche, J. Watmough, Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission, Math. Biosci., 180 (2002), 29–48. https://doi.org/10.1016/S0025-5564(02)00108-6 doi: 10.1016/S0025-5564(02)00108-6
|
| [28] | A. Hamid, P. Sinha, The impact of media coverage on the dynamics of vector-borne diseases, Comput. Ecol. Soft., 12 (2022), 54–66. |
| [29] | C. C. Chavez, S. Blower, P. Driessche, D. Kirschner, A. A. Yakubu, Mathematical approaches for emerging and reemerging infectious diseases: models, methods, and theory, Springer Science and Business Media, 2002. https://doi.org/10.1007/978-1-4613-0065-6 |
| [30] |
N. Chitnis, J. M. Hyman, J. M. Cushing, Determining important parameters in the spread of malaria through the sensitivity analysis of a mathematical model, Bull. Math. Biol., 70 (2008), 1272–1296. https://doi.org/10.1007/s11538-008-9299-0 doi: 10.1007/s11538-008-9299-0
|
| [31] | W. H. Fleming, R. W. Rishel, Deterministic and stochastic optimal control, Springer Science and Business Media, 1975. https://doi.org/10.1007/978-1-4612-6380-7 |
| [32] | J. K. Hale, Ordinary differential equations, Springer New York, 1998. https://doi.org/10.1007/978-1-4612-0601-9 |
| [33] | L. S. Pontryagin, Mathematical theory of optimal processes, CRC press, 1987. https://doi.org/10.1201/9780203749319. |














Figures(15) / Tables(2)

Ahmed Alshehri, Saif Ullah. Optimal control analysis of Monkeypox disease with the impact of environmental transmission[J]. AIMS Mathematics, 2023, 8(7): 16926-16960. doi: 10.3934/math.2023865







 DownLoad:
DownLoad: