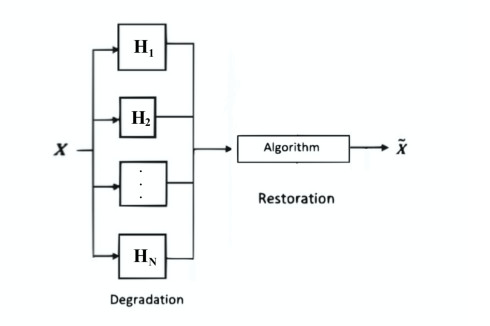
In this paper, we establish a modified proximal point algorithm for solving the common problem between convex constrained minimization and modified variational inclusion problems. The proposed algorithm base on the proximal point algorithm in [
Citation: Areerat Arunchai, Thidaporn Seangwattana, Kanokwan Sitthithakerngkiet, Kamonrat Sombut. Image restoration by using a modified proximal point algorithm[J]. AIMS Mathematics, 2023, 8(4): 9557-9575. doi: 10.3934/math.2023482
In this paper, we establish a modified proximal point algorithm for solving the common problem between convex constrained minimization and modified variational inclusion problems. The proposed algorithm base on the proximal point algorithm in [

| [1] | G. P. Crespi, A. Guerraggio, M. Rocca, Minty variational inequality and optimization: Scalar and vector case, In: Generalized convexity and monotonicity and applications, Boston: Springer, 2005. https://doi.org/10.1007/0-387-23639-2_12 |
| [2] | B. Martinet, Régularisation d'inéquations variationnelles par approximations successives, Recherche Opérationnelle, 4 (1970), 154–158. |
| [3] |
R. T. Rockafellar, Monotone operators and the proximal point algorithm, SIAM J. Control Optim., 14 (1976), 877–898. https://doi.org/10.1137/0314056 doi: 10.1137/0314056

|
| [4] |
O. Güler, On the convergence of the proximal point algorithm for convex minimization, SIAM J. Control Optim., 29 (1991), 403–419. https://doi.org/10.1137/032902 doi: 10.1137/032902
|
| [5] |
S. Kamimura, W. Takahashi, Strong convergence of a proximal-type algorithm in a Banach space, SIAM J. Optim., 13 (2003), 938–945. https://doi.org/10.1137/S105262340139611X doi: 10.1137/S105262340139611X
|
| [6] |
N. Lehdili, A. Moudafi, Combining the proximal algorithm and Tikhonov regularization, Optimization, 37 (1996), 239–252. https://doi.org/10.1080/02331939608844217 doi: 10.1080/02331939608844217
|
| [7] |
S. Reich, Strong convergence theorems for resolvents of accretive operators in Banach spaces, J. Math. Anal. Appl., 75 (1980), 287–292. https://doi.org/10.1016/0022-247X(80)90323-6 doi: 10.1016/0022-247X(80)90323-6
|
| [8] |
M. V. Solodov, B. F. Svaiter, Forcing strong convergence of proximal point iterations in a Hilbert space, Math. Program., 87 (2000), 189–202. https://doi.org/10.1007/s101079900113 doi: 10.1007/s101079900113
|
| [9] |
H. K. Xu, A regularization method for the proximal point algorithm, J. Glob. Optim., 36 (2006), 115–125. https://doi.org/10.1007/s10898-006-9002-7 doi: 10.1007/s10898-006-9002-7
|
| [10] | J. M. Borwein, A. S. Lewis, Convex analysis and nonlinear optimization: Theory and examples, New York: Springer, 2005. https://doi.org/10.1007/978-0-387-31256-9 |
| [11] |
T. Seangwattana, K. Sombut, A. Arunchai, K. Sitthithakerngkiet, A modified Tseng's method for solving the modified variational inclusion problems and its applications, Symmetry, 13 (2021), 2250. https://doi.org/10.3390/sym13122250 doi: 10.3390/sym13122250
|
| [12] |
P. L. Lions, B. Mercier, Splitting algorithms for the sum of two nonlinear operators, SIAM J. Numer. Anal., 16 (1979), 964–979. https://doi.org/10.1137/0716071 doi: 10.1137/0716071
|
| [13] |
G. B. Passty, Ergodic convergence to a zero of the sum of monotone operators in Hilbert spaces, J. Math. Anal. Appl., 72 (1979), 383–390. https://doi.org/10.1016/0022-247X(79)90234-8 doi: 10.1016/0022-247X(79)90234-8
|
| [14] |
P. Tseng, A modified forward-backward splitting method for maximal monotone mappings, SIAM J. Control Optim., 38 (1998), 431–446. https://doi.org/10.1137/S0363012998338806 doi: 10.1137/S0363012998338806
|
| [15] |
G. H-G. Chen, R. T. Rockafellar, Convergence rates in forward-backward splitting, SIAM J. Optim., 7 (1997), 421–444. https://doi.org/10.1137/S1052623495290179 doi: 10.1137/S1052623495290179
|
| [16] |
S. Kamimura, W. Takahashi, Approximating solutions of maximal monotone operators in Hilbert spaces, J. Approx. Theory, 106 (2000), 226–240. https://doi.org/10.1006/jath.2000.3493 doi: 10.1006/jath.2000.3493
|
| [17] |
A. Adamu, D. Kitkuan, P. Kumam, A. Padcharoen, T. Seangwattana, Approximation method for monotone inclusion problems in real Banach spaces with applications, J. Inequal. Appl., 70 (2022), 70. https://doi.org/10.1186/s13660-022-02805-0 doi: 10.1186/s13660-022-02805-0
|
| [18] |
O. A. Boikanyo, The viscosity approximation forward-backward splitting method for zeros of the sum of monotone operators, Abstr. Appl. Anal., 2016 (2016), 2371857. https://doi.org/10.1155/2016/2371857 doi: 10.1155/2016/2371857
|
| [19] |
T. M. M. Sow, A modified proximal point algorithm for solving variational inclusion problem in real Hilbert spaces, e-J. Anal. Appl. Math., 2020 (2020), 28–39. https://doi.org/10.2478/ejaam-2020-0003 doi: 10.2478/ejaam-2020-0003
|
| [20] |
W. Khuangsatung, A. Kangtunyakarn, Algorithm of a new variational inclusion problems and strictly pseudononspreading mapping with application, Fixed Point Theory Appl., 2014 (2014), 209. https://doi.org/10.1186/1687-1812-2014-209 doi: 10.1186/1687-1812-2014-209
|
| [21] |
W. Khuangsatung, A. Kangtunyakarn, A theorem of variational inclusion problems and various nonlinear mappings, Appl. Anal., 97 (2017), 1172–1186. https://doi.org/10.1080/00036811.2017.1307965 doi: 10.1080/00036811.2017.1307965
|
| [22] |
T. M. M. Sow, An iterative algorithm for solving equilibrium problems, variational inequalities and fixed point problems of multivalued quasi-nonexpansive mappings, Appl. Set-Valued Anal. Optim., 1 (2019), 171–185. https://doi.org/10.23952/asvao.1.2019.2.06 doi: 10.23952/asvao.1.2019.2.06
|
| [23] | L. Ambrosio, N. Gigli, G. Savaré, Gradient flows: In metric spaces and in the space of probability measures, Basel: Birkhäuser, 2005. https://doi.org/10.1007/b137080 |
| [24] |
J. Jost, Convex functionals and generalized harmonic maps into spaces of nonpositive curvature, Comment. Math. Helvetici, 70 (1995), 659–673. https://doi.org/10.1007/BF02566027 doi: 10.1007/BF02566027
|
| [25] | I. Miyadera, Translations of mathematical monographs: Nonlinear semigroups, Rhode Island: American Mathematical Society, 1992. https://doi.org/10.1090/mmono/109 |
| [26] |
S. S. Chang, Y. K. Tang, L. Wang, Y. G. Xu, Y. H. Zhao, G. Wang, Convergence theorems for some multi-valued generalized nonexpansive mappings, Fixed Point Theory Appl., 2014 (2014), 33. https://doi.org/10.1186/1687-1812-2014-33 doi: 10.1186/1687-1812-2014-33
|
| [27] | W. Takahashi, Nonlinear function analysis, Yokohama: Yokohama Publishers, 2000. |
| [28] |
H. K. Xu, Inequalities in Banach spaces with applications, Nonlinear Anal., 16 (1991), 1127–1138. https://doi.org/10.1016/0362-546X(91)90200-K doi: 10.1016/0362-546X(91)90200-K
|







Figures(8)

Areerat Arunchai, Thidaporn Seangwattana, Kanokwan Sitthithakerngkiet, Kamonrat Sombut. Image restoration by using a modified proximal point algorithm[J]. AIMS Mathematics, 2023, 8(4): 9557-9575. doi: 10.3934/math.2023482







 DownLoad:
DownLoad: