In the present work, we consider a one-dimensional Bresse-Timoshenko system with neutral delay term and a viscous damping acting on vertical displacement of the beam. Under appropriate assumptions on the kernel of this kind of delay and based on the multipliers method, we construct a suitable Lyapunov functional that allows us to establish an exponential decay of the energy in spite of the existence of the delay. Moreover, our result does not depend on any condition on the coefficients of the system. Finally, we present some numerical results to illustrate the theoretical result obtained.
Citation: Houssem Eddine Khochemane, Ali Rezaiguia, Hasan Nihal Zaidi. Exponential stability and numerical simulation of a Bresse-Timoshenko system subject to a neutral delay[J]. AIMS Mathematics, 2023, 8(9): 20361-20379. doi: 10.3934/math.20231038
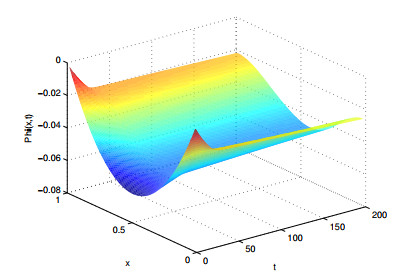
In the present work, we consider a one-dimensional Bresse-Timoshenko system with neutral delay term and a viscous damping acting on vertical displacement of the beam. Under appropriate assumptions on the kernel of this kind of delay and based on the multipliers method, we construct a suitable Lyapunov functional that allows us to establish an exponential decay of the energy in spite of the existence of the delay. Moreover, our result does not depend on any condition on the coefficients of the system. Finally, we present some numerical results to illustrate the theoretical result obtained.

| [1] | C. Abdallah, P. Dorato, J. Benitez-Read, R. Byrne, Delayed positive feedback can stabilize oscillatory system, 1993 American Control Conference, San Francisco, USA, 1993, 3106–3107. https://doi.org/10.23919/ACC.1993.4793475 |
| [2] |
B. Almarri, S. Janaki, V. Ganesan, A. H. Ali, K. Nonlaopon, O. Bazighifan, Novel oscillation theorems and symmetric properties of nonlinear delay differential equations of fourth-order with a middle term, Symmetry, 14 (2022), 585. https://doi.org/10.3390/sym14030585 doi: 10.3390/sym14030585

|
| [3] |
B. Almarri, A. H. Ali, A. M. Lopes, O. Bazighifan, Nonlinear differential equations with distributed delay: some new oscillatory solutions, Mathematics, 10 (2022), 995. https://doi.org/10.3390/math10060995 doi: 10.3390/math10060995
|
| [4] | T. A. Apalara, S. A. Messaoudi, M. I. Mustafa, Energy decay in thermoelastic type Ⅲ with viscoelastic damping and delay, Electron. J. Differ. Eq., 2012 (2012), 128. |
| [5] |
J. Awrejcewicz, A. V. Krysko, V. Soldatov, V. A. Krysko, Analysis of the nonlinear dynamics of the Timoshenko flexible beams using wavelets, J. Comput. Nonlinear Dynam., 7 (2012), 011005. https://doi.org/10.1115/1.4004376 doi: 10.1115/1.4004376
|
| [6] |
J. Awrejcewicz, A. V. Krysko, S. P. Pavlov, M. V. Zhigalov, V. A. Krysko, Stability of the size-dependent and fnctionally graded curvilinear Timoshenko beams, J. Comput. Nonlinear Dynam., 12 (2017), 041018. https://doi.org/10.1115/1.4035668 doi: 10.1115/1.4035668
|
| [7] |
J. Awrejcewicz, A. V. Krysko, S. P. Pavlov, M. V. Zhigalov, V. A. Krysko, Chaotic dynamics of size dependent Timoshenko beams with functionally graded properties along their thickness, Mech. Syst. Signal Pr., 93 (2017), 415–430. https://doi.org/10.1016/j.ymssp.2017.01.047 doi: 10.1016/j.ymssp.2017.01.047
|
| [8] |
J. Awrejcewicz, V. A. Krysko, S. P. Pavlov, M. V. Zhigalov, L. A. Kalutsky, A. V. Krysko, Thermoelastic vibrations of Timoshenko microbeam based on the modified couple stress theory, Nonlinear Dyn., 99 (2020), 919–943. https://doi.org/10.1007/s11071-019-04976-w doi: 10.1007/s11071-019-04976-w
|
| [9] | J. Awrejcewicz, V. A. Krysko, I. V. Papkova, A. V. Krysko, Deterministic chaos in one-dimensional continuous systems, Singapore: World Scientific, 2016. https://doi.org/10.1142/9775 |
| [10] |
R. Datko, Not all feedback stabilized hyperbolic systems are robust with respect to small time delays in their feedbacks, SIAM J. Control Optim., 26 (1988), 697–713. https://doi.org/10.1137/0326040 doi: 10.1137/0326040
|
| [11] |
R. Datko, J. Lagnese, M. P. Polis, An example on the effect of time delays in boundary feedback stabilization of wave equations, SIAM J. Control Optim., 24 (1986), 152–156. https://doi.org/10.1137/0324007 doi: 10.1137/0324007
|
| [12] |
R. D. Driver, A mixed neutral system, Nonlinear Anal. Theor., 8 (1984), 155–158. https://doi.org/10.1016/0362-546X(84)90066-X doi: 10.1016/0362-546X(84)90066-X
|
| [13] | I. Elishakoff, An equation both more consistent and simpler than the Bresse-Timoshenko equation, In: Advanced in mathematical modeling and experimental methods for materials and structures, Dordrecht: Springer, 2009, 249–254. https://doi.org/10.1007/978-90-481-3467-0_19 |
| [14] |
I. Elishakoff, J. Kaplunov, E. Nolde, Celebrating the centenary of Timoshenko's study of effects of shear deformation and rotary inertia, Appl. Mech. Rev., 67 (2015), 060802. https://doi.org/10.1115/1.4031965 doi: 10.1115/1.4031965
|
| [15] |
I. Elishakoff, F. Hache, N. Challamel, Critical contrasting of three versions of vibrating Bresse-Timoshenko beam with a crack, Int. J. Solids Struct., 109 (2017), 143–151. https://doi.org/10.1016/j.ijsolstr.2017.01.015 doi: 10.1016/j.ijsolstr.2017.01.015
|
| [16] |
E. H. Morales, H. R. Henriquez, M. A. McKibben, Existence of solutions for second order partial neutral functional differential equations, Integr. Equ. Oper. Theory, 62 (2008), 191–217. https://doi.org/10.1007/s00020-008-1618-1 doi: 10.1007/s00020-008-1618-1
|
| [17] |
A. Guesmia, Well-posedness and exponential stability of an abstract evolution equation with infinity memory and time delay, IMA J. Math. Control I., 30 (2013), 507–526. https://doi.org/10.1093/imamci/dns039 doi: 10.1093/imamci/dns039
|
| [18] |
D. S. A. Junior, I. Elishakoff, A. J. A. Ramos, L. G. R. Miranda, The hypothesis of equal wave speeds for stabilization of Timoshenko beam is not necessary anymore: the time delay cases, IMA J. Appl. Math., 84 (2019), 763–796. https://doi.org/ 10.1093/imamat/hxz014 doi: 10.1093/imamat/hxz014
|
| [19] |
D. S. A. Junior, A. J. A. Ramos, On the nature of dissipative Timoshenko systems at light of the second spectrum, Z. Angew. Math. Phys., 68 (2017), 145. https://doi.org/10.1007/s00033-017-0881-x doi: 10.1007/s00033-017-0881-x
|
| [20] | H. E. Khochemane, S. Zitouni, L. Bouzettouta, Stability result for a nonlinear damping porous-elastic system with delay term, Nonlinear Studies, 27 (2020), 487–503. |
| [21] |
H. E. Khochemane, L. Bouzettouta, A. Guerouah, Exponential decay and well-posedness for a one-dimensional porous-elastic system with distributed delay, Appl. Anal., 100 (2021), 2950–2964. https://doi.org/10.1080/00036811.2019.1703958 doi: 10.1080/00036811.2019.1703958
|
| [22] | C. Lanczos, The variational principles of mechanics, New York: Dover Publications, 1964. |
| [23] |
G. Liu, J. Yan, Global asymptotic stability of nonlinear neutral differential equation, Commun. Nonlinear Sci., 19 (2014), 1035–1041. https://doi.org/10.1016/j.cnsns.2013.08.035 doi: 10.1016/j.cnsns.2013.08.035
|
| [24] |
S. Loucif, R. Guefaifia, S. Zitouni, H. E. Khochemane, Global well-posedness and exponential decay of fully dynamic and electrostatic or quasi-static piezoelectric beams subject to a neutral delay, Z. Angew. Math. Phys., 74 (2023), 83. https://doi.org/10.1007/s00033-023-01972-4 doi: 10.1007/s00033-023-01972-4
|
| [25] |
S. Nicaise, C. Pignotti, Stabilization of the wave equation with boundary or internal distributed delay, Differ. Integral Equ., 21 (2008), 935–958. https://doi.org/10.57262/die/1356038593 doi: 10.57262/die/1356038593
|
| [26] |
S. Nicaise, C. Pignotti, Stability and instability results of the wave equation with a delay term in the boundary or internal feedbacks, SIAM J. Control Optim., 45 (2006), 1561–1585. https://doi.org/10.1137/060648891 doi: 10.1137/060648891
|
| [27] |
R. Racke, Instability of coupled systems with delay, Commun. Pur. Appl. Anal., 11 (2012), 1753–1773. https://doi.org/10.3934/cpaa.2012.11.1753 doi: 10.3934/cpaa.2012.11.1753
|
| [28] | J. W. S. Rayleigh, The theory of sound, Cambridge: Cambridge University Press, 1877. https://doi.org/10.1017/CBO9781139058087 |
| [29] |
L. Seghour, N. E. Tatar, A. Berkani, Stability of a thermoelastic laminated system subject to a neutral delay, Math. Method. Appl. Sci., 43 (2020), 281–304. https://doi.org/10.1002/mma.5878 doi: 10.1002/mma.5878
|
| [30] |
N. E. Tatar, Stability for the damped wave equation with neutral delay, Math. Nach., 290 (2017), 2401–2412. https://doi.org/10.1002/mana.201600229 doi: 10.1002/mana.201600229
|
| [31] |
S. P. Timoshenko, On the correction for shear of the differential equation for transverse vibrations of prismatic bars, The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science, 6 (1921), 744–746. https://doi.org/10.1080/14786442108636264 doi: 10.1080/14786442108636264
|
| [32] | J. Wang, Existence and stability of solutions for neutral differential equations with delay, International Conference on Multimedia Technology (ICMT), Hangzhou, China, 2011, 2462–2465. https://doi.org/10.1109/ICMT.2011.6002527 |
| [33] |
G. Q. Xu, S. P. Yung, L. K. Li, Stabilization of wave systems with input delay in the boundary control, ESAIM Control Optim. Calc. Var., 12 (2006), 770–785. https://doi.org/10.1051/cocv:2006021 doi: 10.1051/cocv:2006021
|
| [34] |
K. Zennir, D. Ouchenane, A. Choucha, M. Biomy, Well-posedness and stability for Bresse-Timoshenko type systems with thermodiffusion effects and nonlinear damping, AIMS Mathematics, 6 (2021), 2704–2721. https://doi.org/10.3934/math.2021164 doi: 10.3934/math.2021164
|



Figures(4)

Houssem Eddine Khochemane, Ali Rezaiguia, Hasan Nihal Zaidi. Exponential stability and numerical simulation of a Bresse-Timoshenko system subject to a neutral delay[J]. AIMS Mathematics, 2023, 8(9): 20361-20379. doi: 10.3934/math.20231038







 DownLoad:
DownLoad: