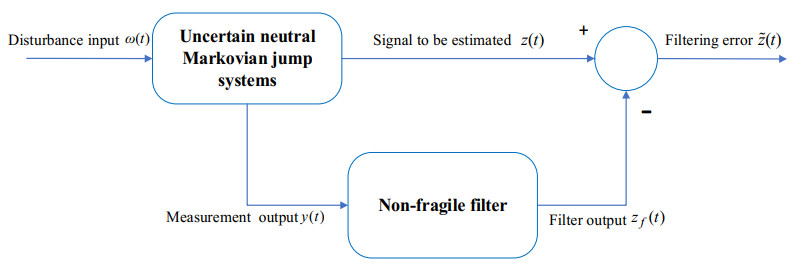
This paper deals with the problem of non-fragile ${H_\infty }$ filter design for a class of neutral Markovian jump systems with parameter uncertainties and time-varying delays. The parameter uncertainties are norm-bounded, and time-varying delays include state and neutral time-varying delays. First, by selecting the appropriate stochastic Lyapunov-Krasovskii functional and using the integral inequality technique, sufficient conditions are obtained to make the filtering error system not only stochastically stabilized, but also mode and delay dependent. Second, by the utilizing linear matrix inequality method, sufficient conditions are obtained for the filtering error system to be stochastically stable and to have a prescribed ${H_\infty }$ performance level $\gamma $. Based on this result, by processing the uncertainty terms, sufficient conditions for the existence of the filter are obtained, and mode-dependent filter parameters are given. Finally, by numerical simulation, the feasibility and validity of the theoretical results are verified.
Citation: Yakufu Kasimu, Gulijiamali Maimaitiaili. Non-fragile ${H_\infty }$ filter design for uncertain neutral Markovian jump systems with time-varying delays[J]. AIMS Mathematics, 2024, 9(6): 15559-15583. doi: 10.3934/math.2024752
This paper deals with the problem of non-fragile ${H_\infty }$ filter design for a class of neutral Markovian jump systems with parameter uncertainties and time-varying delays. The parameter uncertainties are norm-bounded, and time-varying delays include state and neutral time-varying delays. First, by selecting the appropriate stochastic Lyapunov-Krasovskii functional and using the integral inequality technique, sufficient conditions are obtained to make the filtering error system not only stochastically stabilized, but also mode and delay dependent. Second, by the utilizing linear matrix inequality method, sufficient conditions are obtained for the filtering error system to be stochastically stable and to have a prescribed ${H_\infty }$ performance level $\gamma $. Based on this result, by processing the uncertainty terms, sufficient conditions for the existence of the filter are obtained, and mode-dependent filter parameters are given. Finally, by numerical simulation, the feasibility and validity of the theoretical results are verified.

| [1] | N. N. Krasovskii, Analytical design of controllers in systems with random attributes, Automat. Rem. Contr., 22 (1961), 1021–1025. |
| [2] |
A. Friedman, Stochastic differential equations and applications, Stochastic differential equations, Berlin, Heidelberg: Springer Berlin Heidelberg, 77 (1975), 75–148. https://doi.org/10.1007/978-3-642-11079-5_2 doi: 10.1007/978-3-642-11079-5_2

|
| [3] | E. K. Boukas, Stochastic switching systems: Analysis and design, Springer Science & Business Media, 2007.https://doi.org/10.1007/0-8176-4452-0 |
| [4] | O. L. V. Costa, M. D. Fragoso, R. P. Marques, Discrete-time Markov jump linear systems, Springer Science & Business Media, 2005.https://doi.org/10.1007/b138575 |
| [5] |
O. L. V. Costa, M. V. Araujo, A generalized multi-period mean-variance portfolio optimization with Markov switching parameters, Automatica, 44 (2008), 2487–2497. https://doi.org/10.1016/j.automatica.2008.02.014 doi: 10.1016/j.automatica.2008.02.014
|
| [6] |
G. Zhuang, Q. Ma, B. Zhang, S. Y. Xu, J. W. Xia, Admissibility and stabilization of stochastic singular Markovian jump systems with time delays, Syst. Control Lett., 114 (2018), 1–10. https://doi.org/10.1016/j.sysconle.2018.02.004 doi: 10.1016/j.sysconle.2018.02.004
|
| [7] |
L. Xiong, J. Tian, X. Liu, Stability analysis for neutral Markovian jump systems with partially unknown transition probabilities, J. Franklin I., 349 (2012), 2193–2214. https://doi.org/10.1016/j.jfranklin.2012.04.003 doi: 10.1016/j.jfranklin.2012.04.003
|
| [8] |
X. H. Liu, H. S. Xi, On delay-range-dependent stochastic stability conditions of uncertain neutral delay Markovian jump systems, J. Appl. Math., 2013 (2013). https://doi.org/10.1155/2013/101485 doi: 10.1155/2013/101485
|
| [9] |
Y. Zhang, Y. Shi, P. Shi, Robust and non-fragile finite-time control for uncertain Markovian jump nonlinear systems, Appl. Math. Comput., 279 (2016), 125–138. https://doi.org/10.1016/j.amc.2016.01.012 doi: 10.1016/j.amc.2016.01.012
|
| [10] |
J. Cheng, H. Zhu, S. Zhong, Y. Zeng, X. C. Dong, Finite-time control for a class of Markovian jump systems with mode-dependent time-varying delays via new Lyapunov functionals, ISA T., 52 (2013), 768–774. https://doi.org/10.1016/j.isatra.2013.07.015 doi: 10.1016/j.isatra.2013.07.015
|
| [11] |
G. M. Zhuang, S. Y. Xu, J. W. Xia, Q. Ma, Z. Q. Zhang, Non-fragile delay feedback control for neutral stochastic Markovian jump systems with time-varying delays, Appl. Math. Comput., 355 (2019), 21–32. https://doi.org/10.1016/j.amc.2019.02.057 doi: 10.1016/j.amc.2019.02.057
|
| [12] |
S. Xu, J. Lam, X. Mao, Delay-dependent control and filtering for uncertain Markovian jump systems with time-varying delays, IEEE T. Circuits-I, 54 (2007), 2070–2077. https://doi.org/10.1109/TCSI.2007.904640 doi: 10.1109/TCSI.2007.904640
|
| [13] |
M. Sathishkumar, R. Sakthivel, C. Wang, B. Kaviarasan, S. M. Anthoni, Non-fragile filtering for singular Markovian jump systems with missing measurements, Signal Proces., 142 (2018), 125–136. https://doi.org/10.1016/j.sigpro.2017.07.012 doi: 10.1016/j.sigpro.2017.07.012
|
| [14] |
P. Cheng, S. P. He, W. Xie, W. D. Zhang, Finite-region dissipative control for 2-D fuzzy jump systems under hidden mode detection, IEEE T. Syst. Man Cy. S., 2023. https://doi.org/10.1109/TSMC.2023.3278746 doi: 10.1109/TSMC.2023.3278746
|
| [15] |
P. Cheng, H. Chen, S. He, W. Zhang, Asynchronous deconvolution filtering for 2-D Markov jump systems with packet loss compensation, IEEE T. Autom. Sci. Eng., 2023. https://doi.org/10.1109/TASE.2023.3292891 doi: 10.1109/TASE.2023.3292891
|
| [16] | H. Beikzadeh, H. D. Taghirad, Robust ${H_\infty }$ filtering for nonlinear uncertain systems using state-dependent Riccati equation technique, Proceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, IEEE, 2009, 4438–4445.https://doi.org/10.1109/CDC.2009.5399746 |
| [17] |
M. Abbaszadeh, H. J. Marquez, Dynamical robust ${H_\infty }$ filtering for nonlinear uncertain systems: An LMI approach, J. Franklin I., 347 (2010), 1227–1241. https://doi.org/10.1016/j.jfranklin.2010.05.016 doi: 10.1016/j.jfranklin.2010.05.016
|
| [18] |
H. D. Tuan, P. Apkarian, T. Q. Nguyen, Robust and reduced-order filtering: New LMI-based characterizations and methods, IEEE T. Signal Proces., 49 (2001), 2975–2984. https://doi.org/10.1109/78.969506 doi: 10.1109/78.969506
|
| [19] |
D. F. Coutinho, C. E. De Souza, K. A. Barbosa, A. Trofino, Robust linear ${H_\infty }$ filter design for a class of Encertain nonlinear systems: An LMI approach, SIAM J. Control Optim., 48 (2009), 1452–1472. https://doi.org/10.1137/060669504 doi: 10.1137/060669504
|
| [20] | L. Liang, Non-fragile ${H_\infty }$ filtering for fuzzy discrete-time systems with Markovian jump and data Loss, 2021 IEEE 10th Data Driven Control and Learning Systems Conference (DDCLS), IEEE, 2021, 1183–1188.https://doi.org/10.1109/DDCLS52934.2021.9455549 |
| [21] |
W. Qi, Y. Zhou, L. Zhang, J. Cao, J. Cheng, Non-fragile ${H_\infty }$ SMC for Markovian jump systems in a finite-time, J. Franklin I., 358 (2021), 4721–4740. https://doi.org/10.1016/j.jfranklin.2021.04.010 doi: 10.1016/j.jfranklin.2021.04.010
|
| [22] | S. Yan, M. Shen, L. W. Li, B. C. Zheng, Non-fragile ${H_\infty }$ filtering for Markov jump systems with incomplete transition probabilities and intermittent measurements, 2018 Chinese Control And Decision Conference (CCDC), IEEE, 2018, 2133–2138.https://doi.org/10.1109/CCDC.2018.8407479 |
| [23] | H. Zhang, S. Yan, M. Shen, Non-fragile ${H_\infty }$ filtering for discrete stochastic Markov jump systems with intermittent measurements, 2017 Eighth International Conference on Intelligent Control and Information Processing (ICICIP), IEEE, (2017), 135–140.https://doi.org/10.1109/ICICIP.2017.8113930 |
| [24] |
M. Shen, J. H. Park, S. Fei, Event-triggered nonfragile ${H_\infty }$ filtering of Markov jump systems with imperfect transmissions, Signal Proces., 149 (2018), 204–213. https://doi.org/10.1016/j.sigpro.2018.03.015 doi: 10.1016/j.sigpro.2018.03.015
|
| [25] |
G. Zhuang, Y. Wei, Non-fragile ${H_\infty }$ filter design for uncertain stochastic nonlinear time-delay Markovian jump systems, Circ. Syst. Signal Pr., 33 (2014), 3389–3419. https://doi.org/10.1007/s00034-014-9809-2 doi: 10.1007/s00034-014-9809-2
|
| [26] |
Z. X. Li, H. Y. Su, Y. Gu, Z. G. Wu, ${H_\infty }$ filtering for discrete-time singular networked systems with communication delays and data missing, Int. J. Syst. Sci., 44 (2013), 604–614. https://doi.org/10.1080/00207721.2011.617892 doi: 10.1080/00207721.2011.617892
|
| [27] |
Z. Wu, H. Su, J. Chu, Delay-dependent ${H_\infty }$ filtering for singular Markovian jump time-delay systems, Signal Proces., 90 (2010), 1815–1824. https://doi.org/10.1016/j.sigpro.2009.11.029 doi: 10.1016/j.sigpro.2009.11.029
|
| [28] |
J. Chen, S. Xu, B. Zhang, Single/multiple integral inequalities with applications to stability analysis of time-delay systems, IEEE T. Autom. Contr., 62 (2016), 3488–3493. https://doi.org/10.1109/TAC.2016.2617739 doi: 10.1109/TAC.2016.2617739
|
| [29] |
Y. Chen, A. Xue, S. Zhou, New delay-dependent ${L_2} - {L_\infty }$ filter design for stochastic time-delay systems, Signal Process., 89 (2009), 974–980. https://doi.org/10.1016/j.sigpro.2008.11.015 doi: 10.1016/j.sigpro.2008.11.015
|
| [30] |
G. Zhuang, J. Lu, M. Zhang, Robust ${H_\infty }$ filter design for uncertain stochastic Markovian jump Hopfield neural networks with mode-dependent time-varying delays, Neurocomputing, 127 (2014), 181–189. https://doi.org/10.1016/j.neucom.2013.08.016 doi: 10.1016/j.neucom.2013.08.016
|
| [31] |
G. Liu, S. Xu, J. H. Park, G. M. Zhuang, Reliable exponential filtering for singular Markovian jump systems with time-varying delays and sensor failures, Int. J. Robust Nonlin., 28 (2018), 4230–4245. https://doi.org/10.1002/rnc.4230 doi: 10.1002/rnc.4230
|
| [32] | W. Wang, S. Kong, G. Cui, Robust ${H_\infty }$ filtering for discrete-time Markovian jump systems with time-varying delay and parametric uncertainties, 2020 39th Chinese Control Conference (CCC). IEEE, 2020,932–937.https://doi.org/10.23919/CCC50068.2020.9188423 |
| [33] |
R. Rabah, G. M. Sklyar, A. V. Rezounenko, On strong regular stabilizability for linear neutral type systems, J. Differ. Equations, 245 (2008), 569–593. https://doi.org/10.1016/j.jde.2008.02.041 doi: 10.1016/j.jde.2008.02.041
|
| [34] |
W. Chen, Q. Ma, B. Zhang, State estimation of neutral Markovian jump systems: A relaxed L-K functional approach, J. Franklin I., 355 (2018), 3659–3676. https://doi.org/10.1016/j.jfranklin.2018.01.041 doi: 10.1016/j.jfranklin.2018.01.041
|
| [35] |
Y. Li, J. Liu, Robust filtering for Markovian jump neutral systems with distributed delays, Syst. Sci. Control Eng., 4 (2016), 295–306. https://doi.org/10.1080/21642583.2016.1238326 doi: 10.1080/21642583.2016.1238326
|
| [36] |
H. Wang, Y. Wang, G. Zhuang, Asynchronous ${H_\infty }$ controller design for neutral singular Markov jump systems under dynamic event-triggered schemes, J. Franklin I., 358 (2021), 494–515. https://doi.org/10.1016/j.jfranklin.2020.10.034 doi: 10.1016/j.jfranklin.2020.10.034
|
| [37] |
Y. Yu, X. Tang, T. Li, S. M. Fei, Mixed-delay-dependent ${L_2} - {L_\infty }$ filtering for neutral stochastic systems with time-varying delays, Int. J. Control Autom., 17 (2019), 2862–2870. https://doi.org/10.1007/s12555-019-0160-z doi: 10.1007/s12555-019-0160-z
|
| [38] |
M. Hua, H. Tan, J. Fei, J. J. Ni, Robust stability and ${H_\infty }$ filter design for neutral stochastic neural networks with parameter uncertainties and time-varying delay, Int. J. Mach. Learn. Cyb., 8 (2017), 511–524. https://doi.org/10.1007/s13042-015-0342-9 doi: 10.1007/s13042-015-0342-9
|
| [39] |
Y. Li, F. Deng, F. Xie, Robust delay-dependent ${H_\infty }$ filtering for uncertain Takagi-Sugeno fuzzy neutral stochastic time-delay systems, J. Franklin I., 356 (2019), 11561–11580. https://doi.org/10.1016/j.jfranklin.2019.02.043 doi: 10.1016/j.jfranklin.2019.02.043
|
| [40] |
G. Zhao, G. Zhuang, J. W. Xia, W. Sun, J. S. Zhao, M. S. Zhang, Mode-dependent ${H_\infty }$ filtering for time-varying delays neutral jump systems based on FWM technique, Int. J. Control Autom., 19 (2021), 2092–2104. https://doi.org/10.1007/s12555-020-0362-4 doi: 10.1007/s12555-020-0362-4
|
| [41] |
G. Zhuang, S. Xu, B. Zhang, H. L. Xu, Y. M. Chu, Robust ${H_\infty }$ deconvolution filtering for uncertain singular Markovian jump systems with time‐varying delays, Int. J. Robust Nonlin., 26 (2016), 2564–2585. https://doi.org/10.1002/rnc.3461 doi: 10.1002/rnc.3461
|
| [42] | D. Yue, Q. L. Han, A delay-dependent stability criterion of neutral systems and its application to a partial element equivalent circuit model, Proceedings of the 2004 American control conference, IEEE, 6 (2004), 5438–5442. |








Figures(9) / Tables(1)

Yakufu Kasimu, Gulijiamali Maimaitiaili. Non-fragile ${H_\infty }$ filter design for uncertain neutral Markovian jump systems with time-varying delays[J]. AIMS Mathematics, 2024, 9(6): 15559-15583. doi: 10.3934/math.2024752







 DownLoad:
DownLoad: