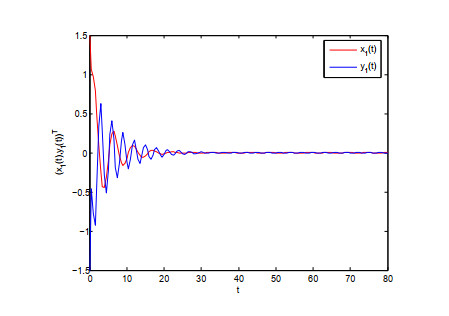
We discuss periodic solution problems and asymptotic stability for inertial neural networks with $ D- $operator and variable parameters. Based on Mawhin's continuation theorem and Lyapunov functional method, some new sufficient conditions on the existence and asymptotic stability of periodic solutions are established. Finally, a numerical example verifies the effectiveness of the obtained results.
Citation: Lingping Zhang, Bo Du. Periodic solution for inertial neural networks with variable parameters[J]. AIMS Mathematics, 2021, 6(12): 13580-13591. doi: 10.3934/math.2021789
We discuss periodic solution problems and asymptotic stability for inertial neural networks with $ D- $operator and variable parameters. Based on Mawhin's continuation theorem and Lyapunov functional method, some new sufficient conditions on the existence and asymptotic stability of periodic solutions are established. Finally, a numerical example verifies the effectiveness of the obtained results.

| [1] |
C. Koch, Cable theory in neurons with active linearized membrane, Biol. Cybern., 50 (1984), 15–33. doi: 10.1007/BF00317936

|
| [2] |
D. Wheeler, W. Schieve, Stability and chaos in an inertial two neuron system, Physcia D, 105 (1997), 267–284. doi: 10.1016/S0167-2789(97)00008-0
|
| [3] |
K. Babcock, R. Westervelt, Stability and dynamics of simple electronic neural networks with added inertia, Physcia D, 23 (1986), 464–469. doi: 10.1016/0167-2789(86)90152-1
|
| [4] |
Z. Tu, J. Cao, T. Hayat, Global exponential stability in Lagrange sense for inertial neural networks with time-varying delays, Neurocomputing, 171 (2016), 524–531. doi: 10.1016/j.neucom.2015.06.078
|
| [5] |
P. Wan, J. Jian, Global convergence analysis of impulsive inertial neural networks with time-varying delays, Neurocomputing, 245 (2017), 68–76. doi: 10.1016/j.neucom.2017.03.045
|
| [6] |
Z. Tu, J. Cao, T. Hayat, Matrix measure based dissipativity analysis for inertial delayed uncertain neural networks, Neural Networks, 75 (2016), 47–55. doi: 10.1016/j.neunet.2015.12.001
|
| [7] |
Y. Wang, X. Hu, K. Shi, X. Song, H. Shen, Network-based passive estimation for switched complex dynamical networks under persistent dwell-time with limited signals, J. Franklin I., 357 (2020), 10921–10936. doi: 10.1016/j.jfranklin.2020.08.037
|
| [8] | J. Wang, X. Hu, J. Cao, H. Ju, H. Shen, H$_\infty$ state estimation for switched inertial neural networks with time-varying delays: A persistent dwell-time scheme, IEEE T. Syst. Man Cy-S., 99 (2021), 1–11. |
| [9] |
Y. Liu, J. Xia, B. Meng, X. Song, H. Shen, Extended dissipative synchronization for semi-Markov jump complex dynamic networks via memory sampled-data control scheme, J. Franklin I., 357 (2020), 10900–10920. doi: 10.1016/j.jfranklin.2020.08.023
|
| [10] |
A. B. Abubakar, P. Kumam, A. H. Ibrahim, Inertial derivative-free projection method for nonlinear monotone operator equations with convex constraints, IEEE Access, 9 (2021), 92157–92167. doi: 10.1109/ACCESS.2021.3096125
|
| [11] |
A. H. Ibrahim, P. Kumam, A. B. Abubakar, U. B. Yusuf, S. E. Yimer, K. O. Aremu, An efficient gradient-free projection algorithm for constrained nonlinear equations and image restoration, AIMS Math., 6 (2021), 235–260. doi: 10.3934/math.2021016
|
| [12] |
A. B. Abubakar, P. Kumam, M. Malik, P. Chaipunya, A. H. Ibrahim, A hybrid FR-DY conjugate gradient algorithm for unconstrained optimization with application in portfolio selection, AIMS Math., 6 (2021), 6506–6527. doi: 10.3934/math.2021383
|
| [13] |
L. Hien, L. Hai An, Positive solutions and exponential stability of positive equilibrium of inertial neural networks with multiple time-varying delays, Neural Comput. Appl., 31 (2019), 6933–6943. doi: 10.1007/s00521-018-3536-8
|
| [14] |
H. Ding, Q. Liu, J. Nieto, Existence of positive almost periodic solutions to a class of hematopoiesis model, Appl. Math. Model., 40 (2016), 3289–3297. doi: 10.1016/j.apm.2015.10.020
|
| [15] |
Z. Zhang, M. Chen, A. Li, Further study on finite-time synchronization for delayed inertial neural networks via inequality skills, Neurocomputing, 373 (2020), 15–23. doi: 10.1016/j.neucom.2019.09.034
|
| [16] |
A. Alimi, C. Aouiti, E. Assali, Finite-time and fixed-time synchronization of a class of inertial neural networks with multi-proportional delays and its application to secure communication, Neurocomputing, 332 (2019), 29–43. doi: 10.1016/j.neucom.2018.11.020
|
| [17] |
Z. Gui, W. Ge, X. Yang, Periodic oscillation for a Hopfield neural networks with neutral delays, Phys. Lett. A, 364 (2007), 267–273. doi: 10.1016/j.physleta.2006.12.013
|
| [18] |
R. Rakkiyappan, P. Balasubramaniama, J. Cao, Global exponential stability results for neutral-type impulsive neural networks, Nonlinear Anal-Real., 11 (2010), 122–130. doi: 10.1016/j.nonrwa.2008.10.050
|
| [19] | J. Hale, Functional Differential Equations, Springer, New York, NY, 1971. |
| [20] |
G. Aouiti, E. A. Assali, I. B. Gharbia, Y. E. Foutayeni, Existence and exponential stability of piecewise pseudo almost periodic solution of neutral-type inertial neural networks with mixed delay and impulsive perturbations, Neurocomputing, 357 (2019), 292–309. doi: 10.1016/j.neucom.2019.04.077
|
| [21] |
L. Duan, J. Jian, B. Wang, Global exponential dissipativity of neutral-type BAM inertial neural networks with mixed time-varying delays, Neurocomputing, 378 (2020), 399–412. doi: 10.1016/j.neucom.2019.10.082
|
| [22] |
B. Du, L. Guo, W. Ge, S. Lu, Periodic solutions for generalized Li$\acute{e}$nard neutral equation with variable parameter, Nonlinear Anal-Theor., 70 (2009), 2387–2394. doi: 10.1016/j.na.2008.03.021
|
| [23] |
S. Lu, J. Ren, W. Ge, Problems of periodic solutions for a kind of second order neutral functional differential equation, Appl. Anal., 82 (2003), 411–426. doi: 10.1080/0003681031000103013
|
| [24] |
M. Xu, B. Du, Periodic solution for neutral-type inertial neural networks with time-varying delays, Adv. Differ. Equ., 2020 (2020), 607. doi: 10.1186/s13662-020-03069-y
|
| [25] | R. Gaines, J. Mawhin, Coincidence Degree and Nonlinear Differential Equations, Springer, Berlin, 1977. |
| [26] | I. Barbalat, Systems d'equations differential d'oscillationsn onlinearities, Rev. Rounm. Math. Pures Appl., 4 (1959), 267–270. |
| [27] |
S. Lu, W. Ge, Periodic solutions to a kind of neutral functional differential equation in the critical case, J. Math. Anal. Appl., 293 (2004), 462–475. doi: 10.1016/j.jmaa.2004.01.031
|
| [28] |
B. Du, S. Lu, Y. Liu, Periodic solution for neutral-type neural networks in the critical case, Neural Process. Lett., 44 (2016), 765–777. doi: 10.1007/s11063-015-9493-7
|
Figures(1)

Lingping Zhang, Bo Du. Periodic solution for inertial neural networks with variable parameters[J]. AIMS Mathematics, 2021, 6(12): 13580-13591. doi: 10.3934/math.2021789







 DownLoad:
DownLoad: