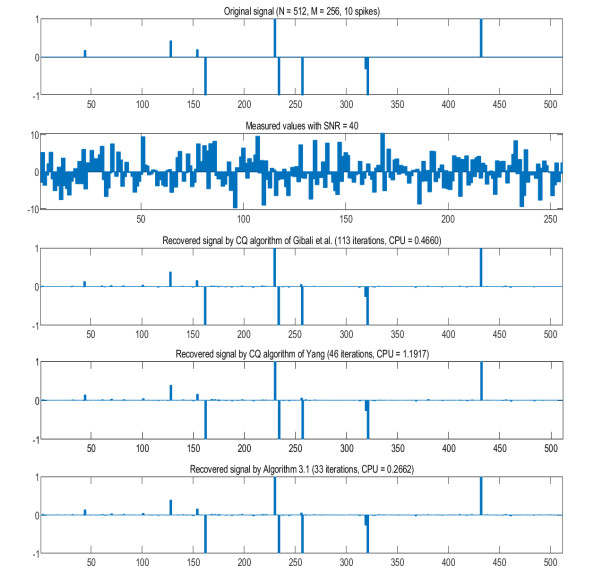
In this work, we propose a new relaxed projection algorithm for the split feasibility problem with a new linesearch. The proposed method does not require the computation on the matrix inverse and the largest eigenvalue of the matrix. We then prove some weak convergence theorems under suitable conditions in the framework of Hilbert spaces. Finally, we give some numerical examples in signal processing to validate the theoretical analysis results. The obtained results improve the corresponding results in the literature.
Citation: Suthep Suantai, Suparat Kesornprom, Nattawut Pholasa, Yeol Je Cho, Prasit Cholamjiak. A relaxed projection method using a new linesearch for the split feasibility problem[J]. AIMS Mathematics, 2021, 6(3): 2690-2703. doi: 10.3934/math.2021163
In this work, we propose a new relaxed projection algorithm for the split feasibility problem with a new linesearch. The proposed method does not require the computation on the matrix inverse and the largest eigenvalue of the matrix. We then prove some weak convergence theorems under suitable conditions in the framework of Hilbert spaces. Finally, we give some numerical examples in signal processing to validate the theoretical analysis results. The obtained results improve the corresponding results in the literature.

| [1] |
H. H. Bauschke, P. L. Combettes, A weak-to-strong convergence principle for Fejér-monotone methods in Hilbert spaces, Math. Oper. Res., 26 (2001), 248–264. doi: 10.1287/moor.26.2.248.10558

|
| [2] | H. H. Bauschke, P. L. Combettes, Convex Analysis and Monotone Operator Theory in Hilbert Spaces, Springer, London, 2011. |
| [3] |
C. Byrne, Iterative oblique projection onto convex sets and the split feasibility problem, Inverse Probl., 18 (2002), 441–453. doi: 10.1088/0266-5611/18/2/310
|
| [4] |
C. Byrne, A unified treatment of some iterative algorithms in signal processing and image reconstruction, Inverse Probl., 20 (2004), 103–120. doi: 10.1088/0266-5611/20/1/006
|
| [5] |
Y. Censor, T. Bortfeld, B. Martin, A. Trofimov, A unified approach for inversion problems in intensity-modulated radiation therapy, Phys. Med. Biol., 51 (2006), 2353–2365. doi: 10.1088/0031-9155/51/10/001
|
| [6] | Y. Censor, T. Bortfeld, B. Martin, A. Trofimov, The split feasibility model leading to a unified approach for inversion problems in intensity-modulated radiation therapy, Technical Report, Department of Mathematics, University of Haifa, Israel, 2005. |
| [7] |
Y. Censor, T. Elfving, A multiprojection algorithms using Bregman projection in a product space, Numer. Algorithms, 8 (1994), 221–239. doi: 10.1007/BF02142692
|
| [8] |
Y. Censor, T. Elfving, N. Kopf, T. Bortfeld, The multiple-sets split feasibility problem and its applications for inverse problem, Inverse Prob., 21 (2005), 2071–2084. doi: 10.1088/0266-5611/21/6/017
|
| [9] | Y. Censor, M. Jiang, G. Wang, Biomedical Mathematics: Promising Directions in Imaging, Therapy Planning and Inverse Problems, Medical Physics Publishing, Madison, Wisconsin, 2010. |
| [10] | P. Cholamjiak, S. Kesornprom, N. Pholasa, Weak and strong convergence theorems for the inclusion problem and the fixed-point problem of nonexpansive mappings, Mathematics, 7 (2019), 1–19. |
| [11] | Y. Z. Dang, J. Sun, H. L. Xu, Inertial accelerated algorithms for solving a split feasibility problem, J. Ind. Manage. Optim., 13 (2017), 1383–1394. |
| [12] |
Q. L. Dong, X. H. Li, D. Kitkuan, Y. J. Cho, P. Kumam, Some algorithms for classes of split feasibility problems involving paramonotone equilibria and convex optimization, J. Inequal. Appl., 2019 (2019), 1–23. doi: 10.1186/s13660-019-1955-4
|
| [13] |
Q. L. Dong, Y. C. Tang, Y. J. Cho, Th. M. Rassias, "Optimal" choice of the step length of the projection and contraction methods for solving the split feasibility problem, J. Global Optim., 71 (2018), 341–360. doi: 10.1007/s10898-018-0628-z
|
| [14] | M. Farid, The subgradient extragradient method for solving mixed equilibrium problems and fixed point problems in Hilbert spaces, J. Appl. Numer. Optim., 1 (2019), 335–345. |
| [15] |
M. Fukushima, A relaxed projection method for variational inequalities, Math. Program., 35 (1986), 58–70. doi: 10.1007/BF01589441
|
| [16] | A. Gibali, L. W. Liu, Y. C. Tang, Note on the modified relaxation $CQ$-algorithm for the split feasibility problem, Optim. Lett., 12 (2017), 1–14. |
| [17] | S. Husain, N. Singh, A hybrid iterative algorithm for a split mixed equilibrium problem and a hierarchical fixed point problem, Appl. Set-Valued Anal. Optim., 1 (2019), 149–169. |
| [18] | G. López, V. Martín-Márquez, F. H. Wang, H. K. Xu, Solving the split feasibility problem without prior knowledge of matrix norms, Inverse Prob., 28 (2012), 085004. Available from: http://iopscience.iop.org/0266-5611/28/8/085004. |
| [19] |
G. López, V. Martín-Márquez, H. K. Xu, Perturbation techniques for nonexpansive mappings with applications, Nonlinear Anal.: Real Word Appl., 10 (2009), 2369–2383. doi: 10.1016/j.nonrwa.2008.04.020
|
| [20] |
B. Qu, N. H. Xiu, A note on the $CQ$-algorithm for the split feasibility problem, Inverse Prob., 21 (2005), 1655–1665. doi: 10.1088/0266-5611/21/5/009
|
| [21] |
S. Suantai, S. Kesornprom, P. Cholamjiak, A new hybrid CQ algorithm for the split feasibility problem in Hilbert spaces and its applications to compressed sensing, Mathematics, 7 (2019), 789. doi: 10.3390/math7090789
|
| [22] | W. Takahahsi, J. C. Yao, The split common fixed point problem for two finite families of nonlinear mappings in Hilbert spaces, J. Nonlinear Convex Anal., 20 (2019), 173–195. |
| [23] |
M. Tian, H. F. Zhang, The regularized CQ algorithm without a priori knowledge of operator norm for solving the split feasibility problem, J. Inequalities Appl., 2017 (2017), 1–10. doi: 10.1186/s13660-016-1272-0
|
| [24] | S. Wang, Y. Zhang, W. Wang, H. Guo, Extragradient algorithms for split pseudomonotone equilibrium problems and fixed point problems in Hilbert spaces, J. Nonlinear Funct. Anal., 2019 (2019), 1–19. |
| [25] |
U. Witthayarat, Y. J. Cho, P. Cholamjiak, On solving proximal split feasibility problems and applications, Ann. Funct. Anal., 9 (2018), 111–122. doi: 10.1215/20088752-2017-0028
|
| [26] |
H. K. Xu, Iterative methods for the split feasibility problem in infinite-dimensional Hilbert spaces, Inverse Prob., 26 (2010), 105018. doi: 10.1088/0266-5611/26/10/105018
|
| [27] |
Q. Z. Yang, The relaxed $CQ$-algorithm for solving the split feasibility problem, Inverse Prob., 20 (2004), 1261–1266. doi: 10.1088/0266-5611/20/4/014
|
| [28] | M. A. Noor, Some developments in general variational inequalities, Appl. Math. Comput., 152 (2004), 199–277. |
| [29] | M. A. Noor, K. I. Noor, M. Th. Rassias, New trends in general variational inequalities, Acta Applicandae Math., 170 (2020), 981–1064. |





Figures(6)

Suthep Suantai, Suparat Kesornprom, Nattawut Pholasa, Yeol Je Cho, Prasit Cholamjiak. A relaxed projection method using a new linesearch for the split feasibility problem[J]. AIMS Mathematics, 2021, 6(3): 2690-2703. doi: 10.3934/math.2021163







 DownLoad:
DownLoad: