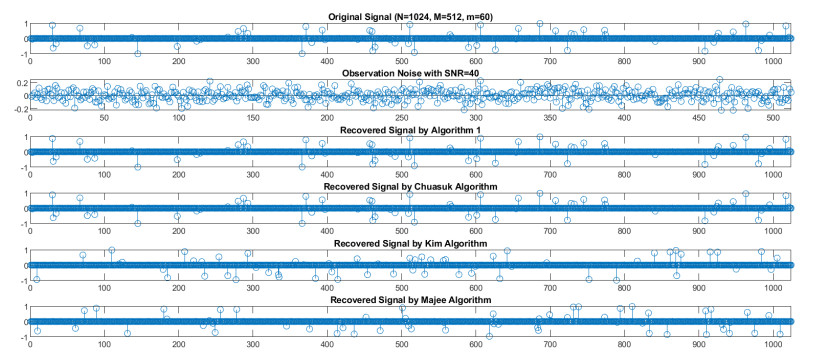
In this study, we establish a new inertial generalized viscosity approximation method and prove that the resulting sequence strongly converges to a common solution of a split generalized mixed equilibrium problem, fixed point problem for a finite family of nonexpansive mappings and hierarchical fixed point problem in real Hilbert spaces. As an application, we demonstrate the use of our main finding in compressed sensing in signal processing. Additionally, we include numerical examples to evaluate the efficiency of the suggested method and then conduct a comparative analysis of its efficiency with different methods. Our findings can be used in a variety of contexts to improve results.
Citation: Charu Batra, Renu Chugh, Mohammad Sajid, Nishu Gupta, Rajeev Kumar. Generalized viscosity approximation method for solving split generalized mixed equilibrium problem with application to compressed sensing[J]. AIMS Mathematics, 2024, 9(1): 1718-1754. doi: 10.3934/math.2024084
In this study, we establish a new inertial generalized viscosity approximation method and prove that the resulting sequence strongly converges to a common solution of a split generalized mixed equilibrium problem, fixed point problem for a finite family of nonexpansive mappings and hierarchical fixed point problem in real Hilbert spaces. As an application, we demonstrate the use of our main finding in compressed sensing in signal processing. Additionally, we include numerical examples to evaluate the efficiency of the suggested method and then conduct a comparative analysis of its efficiency with different methods. Our findings can be used in a variety of contexts to improve results.

| [1] |
Y. Censor, T. Bortfeld, B. Martin, A. Trofimov, A unified approach for inversion problems in intensity-modulated radiation therapy, Phys. Med. Biol., 51 (2006), 2353–2365. https://doi.org/10.1088/0031-9155/51/10/001 doi: 10.1088/0031-9155/51/10/001

|
| [2] |
Y. Censor, A. Segal, The split common fixed point problem for directed operators, J. Convex Anal., 26 (2010), 55007. https://doi.org/10.1088/0266-5611/26/5/055007 doi: 10.1088/0266-5611/26/5/055007
|
| [3] | K. Fan, A minimax inequality and applications, In: Inequality III, New York: Academic Press, 1972,103–113. |
| [4] | E. Blum, W. Oettli, From optimization and variational inequalities to equilibrium problems, Mathematics Student, 63 (1994), 123–145. |
| [5] |
S. Suantai, S. Kesornprom, P. Cholamjiak, A new hybrid CQ algorithm for the split feasibility problem in Hilbert spaces and its applications to compressed sensing, Mathematics, 7 (2019), 789. https://doi.org/10.3390/math7090789 doi: 10.3390/math7090789
|
| [6] |
R. Chugh, R. Kumar, C. Batra, A novel inertial Tseng's method for solving generalized variational inequality problem, J. Appl. Math. Comput., 2023 (2023), 1–27. https://doi.org/10.1007/s12190-023-01942-z doi: 10.1007/s12190-023-01942-z
|
| [7] |
J. W. Peng, J. C. Yao, A new hybrid-extragradient method for generalized mixed equilibrium problems, fixed point problems and variational inequality problems, Taiwanese J. Math., 12 (2008), 1401–1432. https://doi.org/10.11650/twjm/1500405033 doi: 10.11650/twjm/1500405033
|
| [8] | S. Chaiyasil, S. Suantai, Aproximation method for generalized mixed equilibrium problems and fixed point problems for a countable family of nonexpansive mappings, Journal of Nonlinear Analysis and Optimization: Theory and Applications, 2 (2011), 337–353. |
| [9] |
I. Inchan, Extragradient method for generalized mixed equilibrium problems and fixed point problems of finite family of nonexpansive mapping, Appl. Math. Comput., 219 (2012), 2949–2959. https://doi.org/10.1016/j.amc.2012.09.020 doi: 10.1016/j.amc.2012.09.020
|
| [10] |
F. U. Ogbuisi, O. T. Mewomo, On split generalised mixed equilibrium problems and fixed-point problems with no prior knowledge of operator norm, J. Fixed Point Theory Appl., 19 (2017), 2109–2128. https://doi.org/10.1007/s11784-016-0397-6 doi: 10.1007/s11784-016-0397-6
|
| [11] | O. K. Oyewole, O. T. Mewomo, A new inertial-projection method for solving split generalized mixed equilibrium and hierarchical fixed point problems, Kragujev. J. Math., 48 (2024), 199–223. |
| [12] |
A. Moudafi, P. E. Mainge, Towards viscosity approximations of hierarchical fixed point problems, Fixed Point Theory Appl., 2006 (2006), 95453. https://doi.org/10.1155/FPTA/2006/95453 doi: 10.1155/FPTA/2006/95453
|
| [13] |
Y. Yao, Y. C. Liou, J. C. Yao, Iterative algorithms for the split variational inequality and fixed point problems under nonlinear transformations, J. Nonlinear Sci. Appl., 10 (2017), 843–854. https://doi.org/10.22436/jnsa.010.02.43 doi: 10.22436/jnsa.010.02.43
|
| [14] |
A. Kangtunyakarn, S. Suantai, A new mapping for finding common solutions of equilibrium problems and fixed point problems of finite family of nonexpansive mappings, Nonlinear Anal. Theor., 71 (2009), 4448–4460. https://doi.org/10.1016/j.na.2009.03.003 doi: 10.1016/j.na.2009.03.003
|
| [15] |
Anjali, R. Chugh, C. Batra, Fixed point theorems of enriched Ciric's type and enriched Hardy-Rogers contractions, Numer. Algebr. Control, 2023 (2023), 022. https://doi.org/10.3934/naco.2023022 doi: 10.3934/naco.2023022
|
| [16] |
A. Gangwar, A. Tomar, M. Sajid, R. C. Dimri, Common fixed points and convergence results for $\alpha$-Krasnosel'skii mappings, AIMS Mathematics, 8 (2023), 9911–9923. https://doi.org/10.3934/math.2023501 doi: 10.3934/math.2023501
|
| [17] |
C. Batra, N. Gupta, R. Chugh, R. Kumar, Generalized viscosity extragradient algorithm for pseudomonotone equilibrium and fixed point problems for finite family of demicontractive operators, J. Appl. Math. Comput., 68 (2022), 4195–4222. https://doi.org/10.1007/s12190-022-01699-x doi: 10.1007/s12190-022-01699-x
|
| [18] |
R. Chugh, N. Gupta, Strong convergence of new split general system of monotone variational inclusion problem, Appl. Anal., 2023 (2023), 2178423. https://doi.org/10.1080/00036811.2023.2178423 doi: 10.1080/00036811.2023.2178423
|
| [19] |
H. ur Rehman, W. Kumam, K. Sombut, Inertial modification using self-adaptive subgradient extragradient techniques for equilibrium programming applied to variational inequalities and fixed-point problems, Mathematics, 10 (2022), 1751. https://doi.org/10.3390/math10101751 doi: 10.3390/math10101751
|
| [20] | C. Batra, R. Chugh, R. Kumar, Variational inequality problem with application to convex minimization problem, Mathematics in Engineering, Science and Aerospace, 14 (2023), 71–82. |
| [21] |
N. Gupta, L. O. Jolaoso, A. Nandal, R. Chugh, Convergence analysis of multiple-sets split equality common fixed point problem with applications, Numer. Algebr. Control, 2023 (2023), 012. https://doi.org/10.3934/naco.2023012 doi: 10.3934/naco.2023012
|
| [22] |
N. Gupta, M. Postolache, A. Nandal, R. Chugh, A cyclic iterative algorithm for multiple-sets split common fixed point problem of demicontractive mappings without prior knowledge of operator norm, Mathematics, 9 (2021), 372. https://doi.org/10.3390/math9040372 doi: 10.3390/math9040372
|
| [23] |
K. R. Kazmi, R. Ali, M. Furkan, Krasnosel'skii-Mann type iterative method for hierarchical fixed point problem and split mixed equilibrium problem, Numer. Algor., 77 (2018), 289–308. https://doi.org/10.1007/s11075-017-0316-y doi: 10.1007/s11075-017-0316-y
|
| [24] |
P. Majee, C. Nahak, A hybrid viscosity iterative method with averaged mappings for split equilibrium problems and fixed point problems, Numer. Algor., 74 (2017), 609–635. https://doi.org/10.1007/s11075-016-0164-1 doi: 10.1007/s11075-016-0164-1
|
| [25] |
P. Majee, C. Nahak, A modified iterative method for capturing a common solution of split generalized equilibrium problem and fixed point problem, Racsam. Rev. R. Acad. A., 112 (2018), 1327–1348. https://doi.org/10.1007/s13398-017-0428-1 doi: 10.1007/s13398-017-0428-1
|
| [26] |
J. K. Kim, P. Majee, Modified Krasnosel'skii-Mann iterative method for hierarchical fixed point problem and split mixed equilibrium problem, J. Inequal. Appl., 2020 (2020), 227. https://doi.org/10.1186/s13661–250-020-02493-8 doi: 10.1186/s13661–250-020-02493-8
|
| [27] |
M. Yazdi, S. H. Sababe, A viscosity approximation method for solving general system of variational inequalities, generalized mixed equilibrium problems and fixed point problems, Symmetry, 14 (2022), 1507. https://doi.org/10.3390/sym14081507 doi: 10.3390/sym14081507
|
| [28] |
K. Zhao, Solvability, approximation and stability of periodic boundary value problem for a nonlinear Hadamard fractional differential equation with p-Laplacian, Axioms, 12 (2023), 733. https://doi.org/10.3390/axioms12080733 doi: 10.3390/axioms12080733
|
| [29] |
K. Zhao, Generalized UH-stability of a nonlinear fractional coupling ($p_1, p_2$)-Laplacian system concerned with nonsingular Atangana-Baleanu fractional calculus, J. Inequal. Appl., 2023 (2023), 96. https://doi.org/10.1186/s13660-023-03010-3 doi: 10.1186/s13660-023-03010-3
|
| [30] |
K. Zhao, Stability of a nonlinear Langevin system of ML-type fractional derivative affected by time-varying delays and differential feedback control, Fractal Fract., 6 (2022), 725. https://doi.org/10.3390/fractalfract6120725 doi: 10.3390/fractalfract6120725
|
| [31] |
K. Zhao, Stability of a nonlinear fractional Langevin system with nonsingular exponential kernel and delay control, Discrete Dyn. Nat. Soc., 2022 (2022), 9169185. https://doi.org/10.1155/2022/9169185 doi: 10.1155/2022/9169185
|
| [32] | K. Zhao, Global asymptotic stability for a classical controlled nonlinear periodic commensalism AG-ecosystem with distributed lags on time scales, Filomat, 37 (2023), 9899–9911. |
| [33] | R. Chugh, C. Batra, G. Biban, A. Ahuja, New four step iteration process for approximating fixed point of contraction mappings, Mathematics in Engineering, Science and Aerospace, 13 (2022), 1071–1087. |
| [34] |
T. Jin, X. Yang, Monotonicity theorem for the uncertain fractional differential equation and application to uncertain financial market, Math. Comput. Simulat., 190 (2021), 203–221. https://doi.org/10.1016/j.matcom.2021.05.018 doi: 10.1016/j.matcom.2021.05.018
|
| [35] |
T. Jin, H. Xia, Lookback option pricing models based on the uncertain fractional-order differential equation with Caputo type, J. Ambient Intell. Human. Comput., 14 (2021), 6435–6448. https://doi.org/10.1007/s12652-021-03516-y doi: 10.1007/s12652-021-03516-y
|
| [36] |
B. T. Polyak, Some methods of speeding up the convergence of iterative methods, Comp. Math. Math. Phys. 4 (1964), 1–17. https://doi.org/10.1016/0041-5553(64)90137-5 doi: 10.1016/0041-5553(64)90137-5
|
| [37] |
P. Chuasuk, A. Kaewcharoen, Krasnosel'skii-Mann-type inertial method for solving split generalized mixed equilibrium and hierarchical fixed point problems, J. Inequal. Appl., 2021 (2021), 94. https://doi.org/10.1186/s13660-021-02632-9 doi: 10.1186/s13660-021-02632-9
|
| [38] |
G. C. Ugwunnadi, L. Y. Haruna, M. H. Harbau, Accelerated Krasnoselski-Mann type algorithm for hierarchical fixed point and split monotone variational inclusion problems in Hilbert spaces, Carpathian Math. Publ., 15 (2023), 158–179. https://doi.org/10.15330/cmp.15.1.158-179 doi: 10.15330/cmp.15.1.158-179
|
| [39] |
A. Moudafi, P. E. Mainge, Towards viscosity approximations of hierarchical fixed point problems, Fixed Point Theory Appl., 2006 (2006), 95453. https://doi.org/10.1155/FPTA/2006/95453 doi: 10.1155/FPTA/2006/95453
|
| [40] | K. Goebel, S. Reich, Uniform convexity, hyperbolic geometry, and nonexpansive mappings, New York: Dekker, 1983. |
| [41] |
H. H. Bauschke, J. M. Borwein, On projection algorithms for solving convex feasibility problems, SIAM Rev., 38 (1996), 367–426. https://doi.org/10.1137/S0036144593251710 doi: 10.1137/S0036144593251710
|
| [42] |
M. Bianchi, S. Schaible, Generalized monotone bifunctions and equilibrium problems, J. Optimiz. Theory App., 90 (1996), 31–43. https://doi.org/10.1007/BF02192244 doi: 10.1007/BF02192244
|
| [43] |
H. U. Rehman, P. Kumam, Q. L. Dong, Y. Peng, W. Deebani, A new Popov' subgradient extragradient method for two classes of equilibrium programming in a real Hilbert space, Optimization, 70 (2021), 2675–2710. https://doi.org/10.1080/02331934.2020.1797026 doi: 10.1080/02331934.2020.1797026
|
| [44] |
H. A. Abass, C. Izuchukwu, O. T. Mewomo, Viscosity approximation method for modified split generalized equilibrium and fixed point problems, Rev. Union Mat. Argent., 61 (2020), 389–411. https://doi.org/10.33044/revuma.v61n2a13 doi: 10.33044/revuma.v61n2a13
|
| [45] |
G. Marino, H. K. Xu, A general iterative method for nonexpansive mapping in Hilbert spaces, J. Math. Anal. Appl., 318 (2006), 43–52. https://doi.org/10.1016/j.jmaa.2005.05.028 doi: 10.1016/j.jmaa.2005.05.028
|
| [46] |
B. V. Dinh, D. S. Kim, Projection algorithms for solving nonmonotone equilibrium problems in Hilbert space, J. Comput. Appl. Math., 302 (2016), 106–117. https://doi.org/10.1016/j.cam.2016.01.054 doi: 10.1016/j.cam.2016.01.054
|
| [47] |
A. Moudafi, Split monotone variational inclusions, J. Optim. Theory Appl., 150 (2011), 275–283. https://doi.org/10.1007/s10957-011-9814-6 doi: 10.1007/s10957-011-9814-6
|
| [48] | H. H. Bauschke, P. L. Combettes, Convex analysis and monotone operator theory in Hilbert space, Cham: Springer, 2017. https://doi.org/10.1007/978-3-319-48311-5 |
| [49] |
H. Zhou, Convergence theorems of fixed points for k-strict pseudo-contractions in Hilbert spaces, Nonlinear Anal. Theor., 69 (2008), 456–462. https://doi.org/10.1016/j.na.2007.05.032 doi: 10.1016/j.na.2007.05.032
|
| [50] |
P. E. Maingè, Strong convergence of projected subgradient methods for nonsmooth and nonstrictly convex minimization, Set-Valued Analysis, 16 (2008), 899–912. https://doi.org/10.1007/s11228-008-0102-z doi: 10.1007/s11228-008-0102-z
|
| [51] |
S. Li, L. Li L. Cao, X. He, X. Yue, Hybrid extragradient method for generalized mixed equilibrium problem and fixed point problems in Hilbert space, Fixed Point Theory Appl., 2013 (2013), 240. https://doi.org/10.1186/1687-1812-2013-240 doi: 10.1186/1687-1812-2013-240
|
| [52] | P. L. Combettes, S. A. Hirstoaga, Equilibrium programming in Hilbert spaces, J. Nonlinear Convex A., 6 (2005), 117–136. |
| [53] |
T. Suzuki, Strong convergence of Krasnosel'skiii and Mann's type sequences for one parameter nonexpansive semigroups without Bochner integrals, J. Math. Anal. Appl., 305 (2005), 227–239. https://doi.org/10.1016/j.jmaa.2004.11.017 doi: 10.1016/j.jmaa.2004.11.017
|
| [54] |
A. Kangtunyakar, S. Suantai, A new mapping for finding common solutions of equilibrium problems and fixed point problems of finite family of nonexpansive mappings, Nonlinear Anal. Theor., 71 (2009), 4448–4460. https://doi.org/10.1016/j.na.2009.03.003 doi: 10.1016/j.na.2009.03.003
|
| [55] | K. Goebel, W. A. Kirk, Topics in metric fixed point theory, Cambridge: Cambridge University Press, 1990. https://doi.org/10.1017/CBO9780511526152 |
| [56] |
S. H. Rizvi, A strong convergence theorem for split mixed equilibrium and fixed point problems for nonexpansive mappings, J. Fixed Point Theory Appl., 20 (2018), 8. https://doi.org/10.1007/s11784-018-0487-8 doi: 10.1007/s11784-018-0487-8
|
| [57] |
S. Husain, N. Singh, A hybrid iterative algorithm for a split mixed equilibrium problem and a hierarchical fixed point problem, Appl. Set-Valued Anal. Optim., 1 (2019), 149–169. https://doi.org/10.23952/asvao.1.2019.2.05 doi: 10.23952/asvao.1.2019.2.05
|
| [58] |
R. Tibshirani, Regression shrinkage and selection via the Lasso, J. R. Stat. Soc. B, 58 (1996), 267–288. https://doi.org/10.1111/j.2517-6161.1996.tb02080.x doi: 10.1111/j.2517-6161.1996.tb02080.x
|



Figures(4) / Tables(3)

Charu Batra, Renu Chugh, Mohammad Sajid, Nishu Gupta, Rajeev Kumar. Generalized viscosity approximation method for solving split generalized mixed equilibrium problem with application to compressed sensing[J]. AIMS Mathematics, 2024, 9(1): 1718-1754. doi: 10.3934/math.2024084







 DownLoad:
DownLoad: