This paper addresses the robust enhancement problem in the control of robot manipulators. A new hierarchical multiloop model predictive control (MPC) scheme is proposed by combining an inverse dynamics-based feedback linearization and a nonlinear disturbance observer (NDO) based uncertainty compensation. By employing inverse dynamics-based feedback linearization, the multi-link robot manipulator was decoupled to reduce the computational burden compared with the traditional MPC method. Moreover, an NDO was introduced into the input torque signal to compensate and correct the errors from external disturbances and uncertainties, aiming to enhance the robustness of the proposed controller. The feasibility of the proposed hierarchical multiloop MPC scheme was verified and validated via simulation of a 3-DOF robot manipulator. Results demonstrate that the proposed controller provides comparative accuracy and robustness and extends the existing state-of-the-art algorithms for the trajectory tracking problem of robot manipulators with disturbances.
Citation: Xingjia Li, Jinan Gu, Zedong Huang, Chen Ji, Shixi Tang. Hierarchical multiloop MPC scheme for robot manipulators with nonlinear disturbance observer[J]. Mathematical Biosciences and Engineering, 2022, 19(12): 12601-12616. doi: 10.3934/mbe.2022588
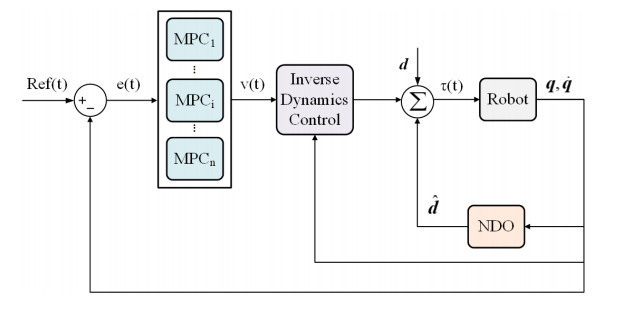
This paper addresses the robust enhancement problem in the control of robot manipulators. A new hierarchical multiloop model predictive control (MPC) scheme is proposed by combining an inverse dynamics-based feedback linearization and a nonlinear disturbance observer (NDO) based uncertainty compensation. By employing inverse dynamics-based feedback linearization, the multi-link robot manipulator was decoupled to reduce the computational burden compared with the traditional MPC method. Moreover, an NDO was introduced into the input torque signal to compensate and correct the errors from external disturbances and uncertainties, aiming to enhance the robustness of the proposed controller. The feasibility of the proposed hierarchical multiloop MPC scheme was verified and validated via simulation of a 3-DOF robot manipulator. Results demonstrate that the proposed controller provides comparative accuracy and robustness and extends the existing state-of-the-art algorithms for the trajectory tracking problem of robot manipulators with disturbances.

| [1] |
Y. Tao, F. Ren, Y. Chen, T. Wang, Y. Zou, C. Chen, et al., A method for robotic grasping based on improved Gaussian mixture model, Math. Biosci. Eng., 17 (2020), 1495–1510. https://doi.org/10.3934/mbe.2020077 doi: 10.3934/mbe.2020077

|
| [2] |
S. Skogestad, Simple analytic rules for model reduction and PID controller tuning, J. Process Contr., 13 (2004), 291–309. https://doi.org/10.1016/S0959-1524(02)00062-8 doi: 10.1016/S0959-1524(02)00062-8
|
| [3] |
F. Vijay Amirtha Raj, V. Kamatchi Kannan, Particle swarm optimized deep convolutional neural Sugeno-Takagi fuzzy PID controller in permanent magnet synchronous motor, Int. J. Fuzzy Syst., 24 (2022), 180–201. https://doi.org/10.1007/s40815-021-01126-6 doi: 10.1007/s40815-021-01126-6
|
| [4] |
R. Fareh, S. Khadraoui, M. Y. Abdallah, M. Baziyad, M. Bettayeb, Active disturbance rejection control for robotic systems: a review, Mechatronics, 80 (2021), 102671. https://doi.org/10.1016/j.mechatronics.2021.102671 doi: 10.1016/j.mechatronics.2021.102671
|
| [5] |
A. B. Yasrebi, A. Hezarkhani, P. Afzal, R. Karami, M. E. Tehrani, A. Borumandnia, Application of an ordinary kriging–artificial neural network for elemental distribution in Kahang porphyry deposit, Central Iran, Arabian J. Geosci., 13 (2020), 1–14. https://doi.org/10.1007/s12517-020-05607-0 doi: 10.1007/s12517-020-05607-0
|
| [6] |
H. Jahanshahi, M. Shahriari-Kahkeshi, R. Alcaraz, X. Wang, V. P. Singh, V. Pham, Entropy analysis and neural network-based adaptive control of a non-equilibrium four-dimensional chaotic system with hidden attractors, Entropy, 21 (2019), 156. https://doi.org/10.3390/e21020156 doi: 10.3390/e21020156
|
| [7] |
S. S. Haq, D. Lenine, S. Lalitha, Performance enhancement of UPQC using Takagi–Sugeno fuzzy logic controller, Int. J. Fuzzy Syst., 23 (2021), 1765–1774. https://doi.org/10.1007/s40815-021-01095-w doi: 10.1007/s40815-021-01095-w
|
| [8] |
H. Jahanshahi, K. Rajagopal, A. Akgul, N. Sari, H. Namazi, S. Jafari, Complete analysis and engineering applications of a megastable nonlinear oscillator, Int. J. Non-Linear Mech., 107 (2018), 126–136. https://doi.org/10.1016/j.ijnonlinmec.2018.08.020 doi: 10.1016/j.ijnonlinmec.2018.08.020
|
| [9] |
H. Jahanshahi, A. Yousefpour, J. M. Munoz-Pacheco, I. Moroz, Z. Wei, O. Castillo, A new multi-stable fractional-order four-dimensional system with self-excited and hidden chaotic attractors: Dynamic analysis and adaptive synchronization using a novel fuzzy adaptive sliding mode control method, Appl. Soft Comput., 87 (2020), 105943. https://doi.org/10.1016/j.asoc.2019.105943 doi: 10.1016/j.asoc.2019.105943
|
| [10] |
H. Benbouhenni, N. Bizon. A synergetic sliding mode controller applied to direct field-oriented control of induction generator-based variable speed dual-rotor wind turbines, Energies, 14 (2021), 4437. https://doi.org/10.3390/en14154437 doi: 10.3390/en14154437
|
| [11] |
H. Jahanshahi, A. Yousefpour, J. M. Munoz-Pacheco, S. Kacar, V. Pham, F. Alsaadi, A new fractional-order hyperchaotic memristor oscillator: Dynamic analysis, robust adaptive synchronization, and its application to voice encryption, Appl. Math. Comput., 383 (2020), 125310. https://doi.org/10.1016/j.amc.2020.125310 doi: 10.1016/j.amc.2020.125310
|
| [12] |
H. Jahanshahi, A. Yousefpour, Z. Wei, R. Alcaraz, S. Bekiros, A financial hyperchaotic system with coexisting attractors: Dynamic investigation, entropy analysis, control and synchronization, Chaos Solitons Fractals, 126 (2019), 66–77. https://doi.org/10.1016/j.chaos.2019.05.023 doi: 10.1016/j.chaos.2019.05.023
|
| [13] |
M. Veysi, J. Aghaei, M. Shasadeghi, R. Razzaghi, B. Bahrani, D. Ryan, Energy-efficient speed control of electric vehicles: linear matrix inequality approach, IEEE Trans. Veh. Technol., 69 (2020), 10469–10483. https://doi:10.1109/tvt.2020.3008500 doi: 10.1109/tvt.2020.3008500
|
| [14] |
A. K. Sharma, R. Sharma, P. Saxena, A. Mohan, A. Bora, P. Kshirsagar, Artificial intelligence based humanoid robot for Covid-19 disinfection, AIP Conf. Proc., 2393 (2022), 020074. https://doi.org/10.1063/5.0074161 doi: 10.1063/5.0074161
|
| [15] |
X. Li, J. Gu, X. Sun, J. Li, S. Tang, Parameter identification of robot manipulators with unknown payloads using an improved chaotic sparrow search algorithm. Appl. Intell., 52 (2022), 10341–10351. https://doi.org/10.1007/s10489-021-02972-5 doi: 10.1007/s10489-021-02972-5
|
| [16] |
P. Quan, Y. Lou, H. Lin, Z. Liang, S. Di, Research on fast identification and location of contour features of electric vehicle charging port in complex scenes, IEEE Access, 99 (2021), 1–13. https://doi.org/10.1109/ACCESS.2021.3092210 doi: 10.1109/ACCESS.2021.3092210
|
| [17] |
L. Roveda, M. Maroni, L. Mazzuchelli, L. Praolini, A. Shahid, G. Bucca, et al., Robot end-effector mounted camera pose optimization in object detection-based tasks, J. Intell. Robotic Syst., 104 (2022), 16. https://doi.org/10.1007/s10846-021-01558-0 doi: 10.1007/s10846-021-01558-0
|
| [18] |
M. Moradi, F. Bayat, M. Charmi, A salient object detection framework using linear quadratic regulator controller, J Visual Commun. Image Represent., 79 (2021), 103259. https://doi.org/10.1016/j.jvcir.2021.103259 doi: 10.1016/j.jvcir.2021.103259
|
| [19] |
A. Hakimzadeh, V. Ghaffari, Designing of non-fragile robust model predictive control for constrained uncertain systems and its application in process control, J. Process Control, 95 (2020), 86–97. https://doi.org/10.1016/j.jprocont.2020.10.004 doi: 10.1016/j.jprocont.2020.10.004
|
| [20] |
H. Jahanshahi, S. Sajjadi, S. Bekiros, A. Aly, On the development of variable-order fractional hyperchaotic economic system with a nonlinear model predictive controller, Chaos SolitonsFractals, 144 (2021), 110698. https://doi.org/10.1016/j.chaos.2021.110698 doi: 10.1016/j.chaos.2021.110698
|
| [21] |
H. F. Erdogan, A. Kural, C. Ozsoy, Model predictive control of an unmanned aerial vehicle, Aircr. Eng. Aerosp. Technol., 89 (2017), 193–202. https://doi.org/10.1108/AEAT-03-2015-0074 doi: 10.1108/AEAT-03-2015-0074
|
| [22] |
E. Kayacan, H. Ramon, W. Saeys, Robust trajectory tracking error model-based predictive control for unmanned ground vehicles, IEEE/ASME Trans. Mechatron., 21 (2016), 806–814. https://doi: 10.1109/TMECH.2015.2492984 doi: 10.1109/TMECH.2015.2492984
|
| [23] |
P. Zhang, Q. Chen, T. Yang, Trajectory Tracking of Autonomous Ground Vehicles with Actuator Dead Zones, Int. J. Comput. Games Tech., 2021 (2021), 2914190. https://doi.org/10.1155/2021/2914190 doi: 10.1155/2021/2914190
|
| [24] | E. H. Guechi, S. Bouzoualegh, Y. Zennir, S. Blazic, MPC control and lq optimal control of a two-link robot arm: a comparative study, Machines, 6 (2018), 37. http://doi.org/10.3390/machines6030037 |
| [25] | J. Wilson, M. Charest, R. Dubay, Non‐linear model predictive control schemes with application on a 2 link vertical robot manipulator, Rob. Comput. Integr. Manuf., 41 (2016), 23–30. http://10.1016/j.rcim.2016.02.003 |
| [26] | C. M. Best, M. T. Gillespie, P. Hyatt, L. Rupert, V. Sherrod, M. Killpack, A new soft robot control method: using model predictive control for a pneumatically actuated humanoid, IEEE Rob. Autom. Mag., 23 (2016), 75–84. http://doi.org/10.1109/mra.2016.2580591 |
| [27] | A. Carron, E. Arcari, M. Wermelinger, L. Hewing, M. Hutter, M. Zeilinger, Data‐driven model predictive control for trajectory tracking with a robotic arm, IEEE Rob. Autom. Lett., 4 (2019), 3758–3765. http://doi.org/10.1109/lra.2019.2929987 |
| [28] | D. Q. Mayne, Model predictive control: recent developments and future promise, Automatica, 50 (2014), 2967–2986. http://doi.org/10.1016/j.automatica.2014.10.128 |
| [29] |
H. Xie, L. Dai, Y. Luo, et al. Robust MPC for disturbed nonlinear discrete-time systems via a composite self-triggered scheme, Automatica, 23 (2021), 109499. https://doi.org/10.1016/j.automatica.2021.109499 doi: 10.1016/j.automatica.2021.109499
|
| [30] |
J. Peng, L. Zhang, Q. Chen, R. Long, K. Zhou, Z. Liu, et al., Anti-disturbance TUBE MPC method of wireless power transmission system based on state feedback, Energy Rep., 7 (2021), 411–418. https://doi.org/10.1016/j.egyr.2021.01.052 doi: 10.1016/j.egyr.2021.01.052
|
| [31] |
G. Bastos, E. Franco. Energy shaping dynamic tube-MPC for underactuated mechanical systems, Nonlinear Dyn., 106 (2021), 359–380. https://doi.org/10.1007/s11071-021-06863-9 doi: 10.1007/s11071-021-06863-9
|
| [32] |
G. P. Incremona, A. Ferrara, L. Magni, MPC for robot manipulators with integral sliding modes generation, IEEE/ASME Trans. Mechatron., 22 (2017), 1299–1307. https://doi.org/10.1109/TMECH.2017.2674701 doi: 10.1109/TMECH.2017.2674701
|
| [33] |
J. Su, W. H. Chen, J. Yang, On relationship between time-domain and frequency-domain disturbance observers and its applications, J. Dyn. Syst. Meas. Control, 138 (2016), 091013. https://doi.org/10.1115/1.4033631 doi: 10.1115/1.4033631
|
| [34] |
J. Yang, W. X. Zheng, S. Li, B. Wu, M. Cheng, Design of a Prediction-Accuracy-Enhanced Continuous-Time MPC for Disturbed Systems via a Disturbance Observer, IEEE T Indust. Electron., 62 (2015), 5807–5816. https://doi.org/10.1109/TIE.2015.2450736. doi: 10.1109/TIE.2015.2450736
|
| [35] |
J. Jin, N. Gans, Parameter identification for industrial robots with a fast and robust trajectory design approach, Rob. Comput. Integer. Manuf., 31 (2015), 21–29. https://doi.org/10.1016/j.rcim.2014.06.004 doi: 10.1016/j.rcim.2014.06.004
|
| [36] |
W. H. Chen, D. J. Balance, P. Gawthrop, J. O'Reilly, A nonlinear disturbance observer for robotic manipulators, IEEE Trans Ind. Electron., 47 (2000), 932–938. https://doi.org/10.1109/41.857974 doi: 10.1109/41.857974
|
| [37] | C. Yu, G. Shi, S. Chung, Y. Yue, A. Wierman, The power of predictions in online control, in NeurlIPS, (2020), 1994–2004. https://dl.acm.org/doi/abs/10.5555/3495724.3495892 |









Figures(10) / Tables(1)

Xingjia Li, Jinan Gu, Zedong Huang, Chen Ji, Shixi Tang. Hierarchical multiloop MPC scheme for robot manipulators with nonlinear disturbance observer[J]. Mathematical Biosciences and Engineering, 2022, 19(12): 12601-12616. doi: 10.3934/mbe.2022588







 DownLoad:
DownLoad: