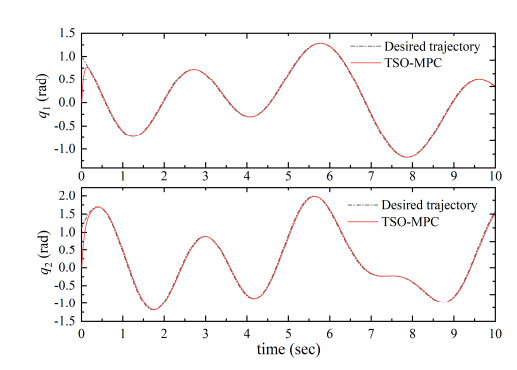
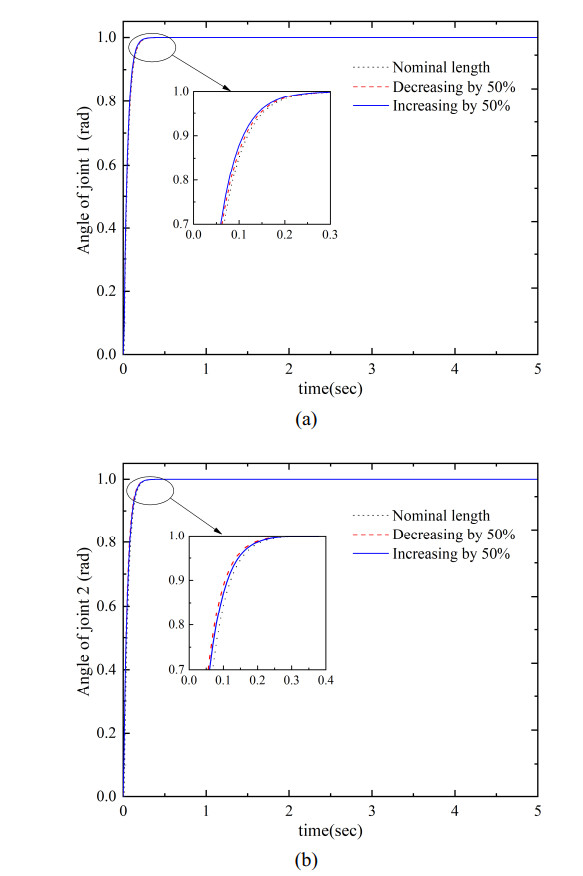
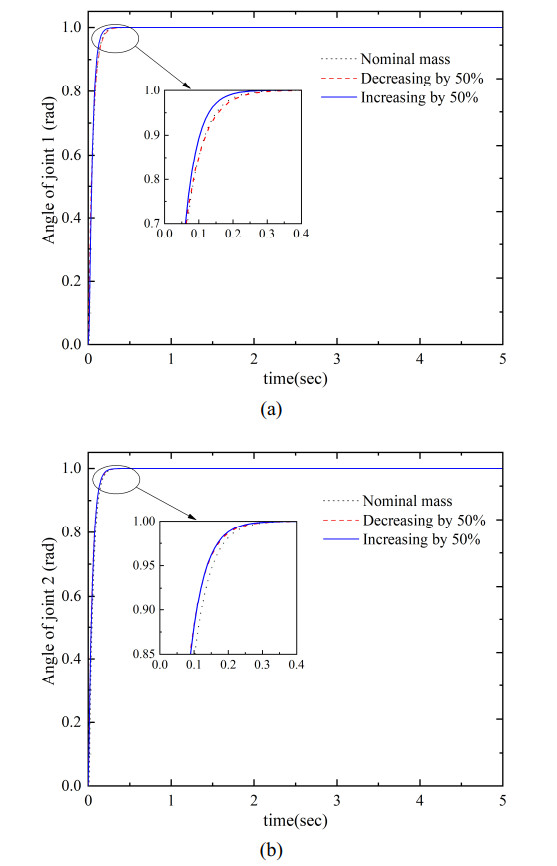
Due to nonlinearity and uncertainty of the robotic manipulator, the design of the robot controller has a crucial impact on its performance of motion and trajectory tracking. In this paper, the linear parameter varying (LPV) - model predictive controller (MPC) of a two-link robot manipulator is established and then the controller's optimal parameters are determined via a newly developed meta-heuristic algorithm, transient search optimization (TSO). The proposed control method is verified by set point and nonlinear trajectory tracking. In the test of set-point tracking, the LPV-MPC scheme optimized by TSO has better performance compared to the computed torque controller (CTC) schemes tuned by TSO or other metaheuristic algorithms. In addition, good performances can also be observed in the tests of nonlinear trajectory tracking via the LPV-MPC scheme by TSO. Moreover, the robustness of the method to structural uncertainty is verified by setting a large system parameter deviation. Results reveal that we achieved some improvements in the optimization of MPC of the robot manipulator by employing the proposed method.
Citation: Xingjia Li, Jinan Gu, Zedong Huang, Wenbo Wang, Jing Li. Optimal design of model predictive controller based on transient search optimization applied to robotic manipulators[J]. Mathematical Biosciences and Engineering, 2022, 19(9): 9371-9387. doi: 10.3934/mbe.2022436
Due to nonlinearity and uncertainty of the robotic manipulator, the design of the robot controller has a crucial impact on its performance of motion and trajectory tracking. In this paper, the linear parameter varying (LPV) - model predictive controller (MPC) of a two-link robot manipulator is established and then the controller's optimal parameters are determined via a newly developed meta-heuristic algorithm, transient search optimization (TSO). The proposed control method is verified by set point and nonlinear trajectory tracking. In the test of set-point tracking, the LPV-MPC scheme optimized by TSO has better performance compared to the computed torque controller (CTC) schemes tuned by TSO or other metaheuristic algorithms. In addition, good performances can also be observed in the tests of nonlinear trajectory tracking via the LPV-MPC scheme by TSO. Moreover, the robustness of the method to structural uncertainty is verified by setting a large system parameter deviation. Results reveal that we achieved some improvements in the optimization of MPC of the robot manipulator by employing the proposed method.

| [1] |
P. Quan, Y. Lou, H. Lin, Z. Liang, S. Di, Research on fast identification and location of contour features of electric vehicle charging port in complex scenes, IEEE Access, 10 (2022), 26702–26714. https://doi.org/10.1109/ACCESS.2021.3092210 doi: 10.1109/ACCESS.2021.3092210

|
| [2] |
S. Skogestad, Simple analytic rules for model reduction and PID controller tuning, J. Process Control, 13 (2003), 291–309. https://doi.org/10.1016/S0959-1524(02)00062-8 doi: 10.1016/S0959-1524(02)00062-8
|
| [3] |
M. K. Singh, D. R. Parhi, Path optimisation of a mobile robot using an artificial neural network controller, Int. J. Syst. Sci., 42 (2011), 107–120. https://doi.org/10.1080/00207720903470155 doi: 10.1080/00207720903470155
|
| [4] |
A. Kosari, H. Jahanshahi, S. A. Razavi, Optimal FPID control approach for a docking maneuver of two spacecraft: translational motion, J. Aerosp. Eng., 30 (2017), 04017011. https://doi.org/10.1061/(ASCE)AS.1943-5525.0000720 doi: 10.1061/(ASCE)AS.1943-5525.0000720
|
| [5] |
S. S. Haq, D. Lenine, S. Lalitha, Performance enhancement of UPQC using Takagi–Sugeno fuzzy logic controller, Int. J. Fuzzy Syst., 23 (2021), 1765–1774. https://doi.org/10.1007/s40815-021-01095-w doi: 10.1007/s40815-021-01095-w
|
| [6] |
A. Kosari, H. Jahanshahi, S. A. Razavi, An optimal fuzzy PID control approach for docking maneuver of two spacecraft: Orientational motion, Eng. Sci. Technol., Int. J., 20 (2017), 293–309. https://doi.org/10.1016/j.jestch.2016.07.018 doi: 10.1016/j.jestch.2016.07.018
|
| [7] |
L. L. Whitcomb, A. A. Rizzi, D. E. Koditschek, Comparative experiments with a new adaptive controller for robot arms, IEEE Trans. Rob. Autom., 9 (1993), 59–70. https://doi.org/10.1109/70.210795 doi: 10.1109/70.210795
|
| [8] |
H. Benbouhenni, N. Bizon, A synergetic sliding mode controller applied to direct field-oriented control of induction generator-based variable speed dual-rotor wind turbines, Energies, 14 (2021), 4437–4453. https://doi.org/10.3390/en14154437 doi: 10.3390/en14154437
|
| [9] |
M. Veysi, J. Aghaei, M. Shasadeghi, R. Razzaghi, B. Bahrani, D. J. Ryan, Energy-efficient speed control of electric vehicles: linear matrix inequality approach, IEEE Trans. Veh. Technol., 69 (2020), 10469–10483. https://doi:10.1109/tvt.2020.3008500 doi: 10.1109/tvt.2020.3008500
|
| [10] |
M. Moradi, F. Bayat, M. Charmi, A salient object detection framework using linear quadratic regulator controller, J. Visual Commun. Image Represent., 79 (2021), 103259. https://doi.org/10.1016/j.jvcir.2021.103259 doi: 10.1016/j.jvcir.2021.103259
|
| [11] |
F. W. Alsaade, H. Jahanshahi, Q. Yao, M. S. Al-zahrani, A. S. Alzahrani, A new neural network-based optimal mixed H2/H∞ control for a modified unmanned aerial vehicle subject to control input constraints, Adv. Space Res., 2022. https://doi.org/10.1016/j.asr.2022.02.012 doi: 10.1016/j.asr.2022.02.012
|
| [12] |
S. Bekiros, H. Jahanshahi, F. Bezzina, A. A. Aly, A novel fuzzy mixed H2/H∞ optimal controller for hyperchaotic financial systems, Chaos, Solitons Fractals, 146 (2021), 110878. https://doi.org/10.1016/j.chaos.2021.110878 doi: 10.1016/j.chaos.2021.110878
|
| [13] |
Q. Ding, H. Jahanshahi, Y. Wang, S. Bekiros, M. O. Alassafi, Optimal reinforcement learning-based control algorithm for a class of nonlinear macroeconomic systems, Mathematics, 10 (2022), 499–512. https://doi.org/10.3390/math10030499 doi: 10.3390/math10030499
|
| [14] |
H. Jahanshahi, S. S. Sajjadi, S. Bekiros, A. A. Aly, On the development of variable-order fractional hyperchaotic economic system with a nonlinear model predictive controller, Chaos, Solitons Fractals, 144 (2021), 110698. https://doi.org/10.1016/j.chaos.2021.110698 doi: 10.1016/j.chaos.2021.110698
|
| [15] |
A. Hakimzadeh, V. Ghaffari, Designing of non-fragile robust model predictive control for constrained uncertain systems and its application in process control, J. Process Control, 95 (2020), 86–97. https://doi.org/10.1016/j.jprocont.2020.10.004 doi: 10.1016/j.jprocont.2020.10.004
|
| [16] |
S. B. Chen, S. Soradi-Zeid, H. Jahanshahi, R. Alcaraz, J. F. Gómez-Aguilar, S. Bekiros, et al., Optimal control of time-delay fractional equations via a joint application of radial basis functions and collocation method, Entropy, 22 (2020), 1213. https://doi.org/10.3390/e22111213 doi: 10.3390/e22111213
|
| [17] |
S. B. Chen, S. Soradi-Zeid, M. Alipour, Y. Chu, J. F. Gomez-Aguilar, H. Jahanshahi, Optimal control of nonlinear time-delay fractional differential equations with Dickson polynomials, Fractals, 29 (2021), 2150079. https://doi.org/10.1142/S0218348X21500791 doi: 10.1142/S0218348X21500791
|
| [18] |
H. Wang, H. Jahanshahi, M. K. Wang, S. Bekiros, J. Liu, A. A. Aly, A Caputo–Fabrizio fractional-order model of HIV/AIDS with a treatment compartment: sensitivity analysis and optimal control strategies, Entropy, 23 (2021), 610. https://doi.org/10.3390/e23050610 doi: 10.3390/e23050610
|
| [19] |
G. P. Incremona, A. Ferrara, L. Magni, MPC for robot manipulators with integral sliding modes generation, IEEE/ASME Trans. Mechatron., 22 (2017), 1299–1307. https://doi.org/10.1109/TMECH.2017.2674701 doi: 10.1109/TMECH.2017.2674701
|
| [20] |
T. Satoh, R. Abe, N. Saito, Control of a two-link manipulator using disturbance observer-based model predictive control, Trans. Japan Soc. Mech. Eng., 81 (2015), 15-00084. https://doi.org/10.1299/transjsme.15-00084 doi: 10.1299/transjsme.15-00084
|
| [21] |
J. Wilson, M. Charest, R. Dubay, Non‐linear model predictive control schemes with application on a 2 link vertical robot manipulator, Rob. Comput. Integr. Manuf., 41 (2016), 23–30. http://doi.org/10.1016/j.rcim.2016.02.003 doi: 10.1016/j.rcim.2016.02.003
|
| [22] |
C. M. Best, M. T. Gillespie, P. Hyatt, L. Rupert, V. Sherrod, M. D. Killpack, A new soft robot control method: using model predictive control for a pneumatically actuated humanoid, IEEE Rob. Autom. Mag., 23 (2016), 75–84. http://doi.org/10.1109/mra.2016.2580591 doi: 10.1109/mra.2016.2580591
|
| [23] | E. H. Guechi, S. Bouzoualegh, Y. Zennir, Sašo Blažič, MPC control and LQ optimal control of a two-link robot arm: a comparative study, Machines, 6 (2018), 37. http://doi.org/10.3390/machines6030037 |
| [24] |
A. Carron, E. Arcari, M. Wermelinger, L. Hewing, M. Hutter, M. N. Zeilinger, Data‐driven model predictive control for trajectory tracking with a robotic arm, IEEE Rob. Autom. Lett., 4 (2019), 3758–3765. http://doi.org/10.1109/lra.2019.2929987 doi: 10.1109/lra.2019.2929987
|
| [25] |
F. Liu, H. Huang, B. Li, F. Xi, A parallel learning particle swarm optimizer for inverse kinematics of robotic manipulator, Int. J. Intell. Syst., 36 (2021), 6101–6132. https://doi.org/10.1002/int.22543 doi: 10.1002/int.22543
|
| [26] |
S. Mirjalili, S. M. Mirjalili, A. Lewis, Grey Wolf optimizer, Adv. Eng. Software, 69 (2014), 46–61. https://doi.org/10.1016/j.advengsoft.2013.12.007 doi: 10.1016/j.advengsoft.2013.12.007
|
| [27] |
G. G. Wang, S. Deb, Z. Cui, Monarch butterfly optimization, Neural Comput. Appl., 31 (2019), 1995–2014. https://doi.org/10.1007/s00521-015-1923-y doi: 10.1007/s00521-015-1923-y
|
| [28] |
X. Li, J. Gu, X. Sun, J. Li, S. Tang, Parameter identification of robot manipulators with unknown payloads using an improved chaotic sparrow search algorithm, Appl. Intell., 52 (2022), 10341–10351. https://doi.org/10.1007/s10489-021-02972-5 doi: 10.1007/s10489-021-02972-5
|
| [29] |
S. Li, H. Chen, M. Wang, A. A. Heidari, S. Mirjalili, Slime mould algorithm: a new method for stochastic optimization, Future Gener. Comput. Syst., 111 (2020), 300–323. https://doi.org/10.1016/j.future.2020.03.055 doi: 10.1016/j.future.2020.03.055
|
| [30] |
G. G. Wang, Moth search algorithm: a bio-inspired metaheuristic algorithm for global optimization problems, Memetic Comput., 10 (2018), 151–164. https://doi.org/10.1007/s12293-016-0212-3 doi: 10.1007/s12293-016-0212-3
|
| [31] |
Y. Yang, H. Chen, A. A. Heidari, A. H. Gandomi, Hunger games search: visions, conception, implementation, deep analysis, perspectives, and towards performance shifts, Expert Syst. Appl., 177 (2021), 114864. https://doi.org/10.1016/j.eswa.2021.114864 doi: 10.1016/j.eswa.2021.114864
|
| [32] |
I. Ahmadianfar, A. A. Heidari, A. H. Gandomi, X. Chu, H. Chen, RUN beyond the metaphor: an efficient optimization algorithm based on Runge Kutta method, Expert Syst. Appl., 181 (2021), 115079. https://doi.org/10.1016/j.eswa.2021.115079 doi: 10.1016/j.eswa.2021.115079
|
| [33] |
J. Tu, H. Chen, M. Wang, A. H. Gandomi, The colony predation algorithm, J. Bionic Eng., 18 (2021), 674–710. https://doi.org/10.1007/s42235-021-0050-y doi: 10.1007/s42235-021-0050-y
|
| [34] |
E. Zakeri, S. A. Moezi, Y. Bazargan-Lari, A. Zare, Multi-tracker optimization algorithm: a general algorithm for solving engineering optimization problems, Iran. J. Sci. Technol., Trans. Mech. Eng., 41 (2017), 315–341. https://doi.org/10.1007/s40997-016-0066-9 doi: 10.1007/s40997-016-0066-9
|
| [35] |
I. Ahmadianfar, A. A. Heidari, S. Noshadian, H. Chen, A. H. Gandomi, INFO: an efficient optimization algorithm based on weighted mean of vectors, Expert Syst. Appl., 195 (2022), 116516. https://doi.org/10.1016/j.eswa.2022.116516 doi: 10.1016/j.eswa.2022.116516
|
| [36] |
A. A. Heidari, S. Mirjalili, H. Faris, I. Aljarah, M. Mafarja, H. Chen, Harris hawks optimization: algorithm and applications, Future Gener. Comput. Syst., 97 (2019), 849–872. https://doi.org/10.1016/j.future.2019.02.028 doi: 10.1016/j.future.2019.02.028
|
| [37] |
K. Zervoudakis, S. Tsafarakis, A mayfly optimization algorithm, Comput. Ind. Eng., 145 (2020), 106559. https://doi.org/10.1016/j.cie.2020.106559 doi: 10.1016/j.cie.2020.106559
|
| [38] |
S. Moosavi, V. K. Bardsiri, Satin bowerbird optimizer: a new optimization algorithm to optimize anfis for software development effort estimation, Eng. Appl. Artif. Intell., 60 (2017), 1–15. https://doi.org/10.1016/j.engappai.2017.01.006 doi: 10.1016/j.engappai.2017.01.006
|
| [39] |
M. H. Qais, H. M. Hasanien, S. Alghuwainem, Transient search optimization: a new meta-heuristic optimization algorithm, Appl. Intell., 50 (2020), 3926–3941. https://doi.org/10.1007/s10489-020-01727-y doi: 10.1007/s10489-020-01727-y
|
| [40] |
M. Elsisi, Optimal design of nonlinear model predictive controller based on new modified multitracker optimization algorithm, Int. J. Intell. Syst., 35 (2020), 1857–1878. https://doi.org/10.1002/int.22275 doi: 10.1002/int.22275
|
| [41] |
J. Jin, N. Gans, Parameter identification for industrial robots with a fast and robust trajectory design approach, Rob. Comput. Integr. Manuf., 31 (2015), 21–29. https://doi.org/10.1016/j.rcim.2014.06.004 doi: 10.1016/j.rcim.2014.06.004
|
| [42] | V. Bhatia, R. Ram, V. Kalaichelvi, R. Karthikeyan, Application of model predictive controller for 2-DOF robot manipulator, in 2015 10th International Symposium on Mechatronics and its Applications (ISMA), (2015), 1–5. https://doi.org/10.1109/ISMA.2015.7373478 |
Figures(7) / Tables(3)

Xingjia Li, Jinan Gu, Zedong Huang, Wenbo Wang, Jing Li. Optimal design of model predictive controller based on transient search optimization applied to robotic manipulators[J]. Mathematical Biosciences and Engineering, 2022, 19(9): 9371-9387. doi: 10.3934/mbe.2022436







 DownLoad:
DownLoad: