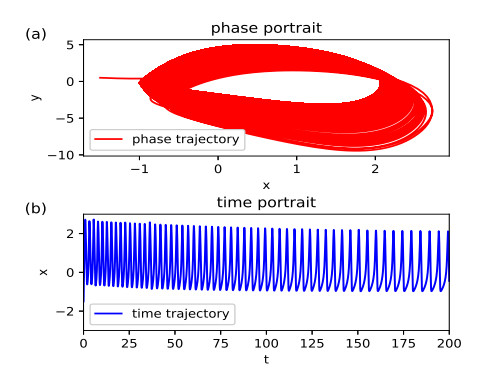
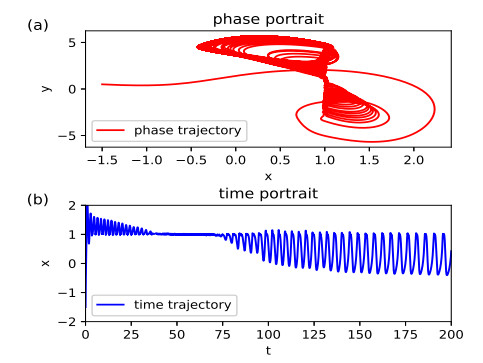
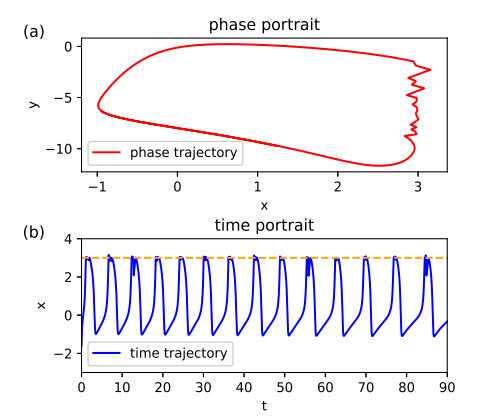
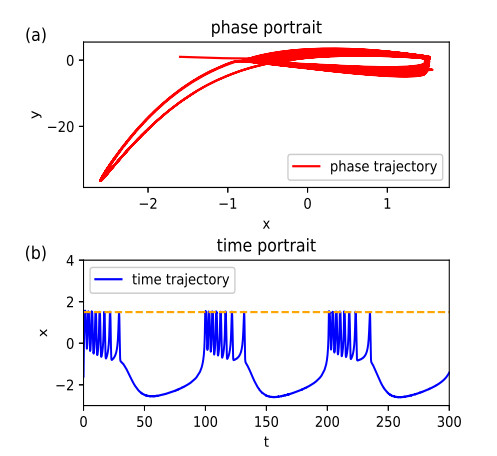
We investigated the phenomenon of pseudo-Hopf bifurcation in a Filippov Hindmarsh-Rose neuronal system with threshold switching, and the existence of crossing limit cycles was proved by constructing the half-return mapping. Through the threshold control, the firing state of the system could be switched, allowing transitions from a non-periodic state to a periodic state, as well as the evolution from spiking to bursting. Furthermore, through threshold switching, the system exhibited the coexistence of multiple attractors, the system could be in multiple stable states, or have multiple stable sets that could attract system trajectories. This meant that neuronal system could exhibits diverse dynamical behaviors than being limited to a single stable state. The phenomenon of period-doubling bifurcation also indicated that the system will eventually enter a chaotic state. By extending the analysis to nonlinear neuronal systems, this study contributes to a deeper understanding of complex dynamics and provides valuable insights for designing state switching in the application of neural dynamics.
Citation: Yi Yang, Rongfeng Li, Xiangguang Dai, Haiqing Li, Changcheng Xiang. Exploring dynamic behavior and bifurcations in a Filippov neuronal system with a double-tangency singularity[J]. AIMS Mathematics, 2024, 9(7): 18984-19014. doi: 10.3934/math.2024924
We investigated the phenomenon of pseudo-Hopf bifurcation in a Filippov Hindmarsh-Rose neuronal system with threshold switching, and the existence of crossing limit cycles was proved by constructing the half-return mapping. Through the threshold control, the firing state of the system could be switched, allowing transitions from a non-periodic state to a periodic state, as well as the evolution from spiking to bursting. Furthermore, through threshold switching, the system exhibited the coexistence of multiple attractors, the system could be in multiple stable states, or have multiple stable sets that could attract system trajectories. This meant that neuronal system could exhibits diverse dynamical behaviors than being limited to a single stable state. The phenomenon of period-doubling bifurcation also indicated that the system will eventually enter a chaotic state. By extending the analysis to nonlinear neuronal systems, this study contributes to a deeper understanding of complex dynamics and provides valuable insights for designing state switching in the application of neural dynamics.

| [1] | B. D. Hassard, N. D. Kazarinoff, Y. H. Wan, Theory and applications of Hopf bifurcation, Cambridge University Press, 1981. https://archive.org/details/theoryapplicatio0000hass |
| [2] | J. Guckenheimer, P. Holmes, Nonlinear oscillations, dynamical systems, and bifurcations of vector fields, Springer, 1984. https://doi.org/10.1115/1.3167759 |
| [3] | S. H. Strogatz, Nonlinear dynamics and Chaos: With applications to physics, biology, chemistry, and engineering, 2 Eds., CRC Press, 2018. https://doi.org/10.1201/9780429492563 |
| [4] | Y. A. Kuznetsov, Elements of applied bifurcation theory, 2 Eds., Springer, 1998. Availble from: https://link.springer.com/book/10.1007/978-1-4757-3978-7. |
| [5] | A. Filippov, Differential equations with discontinuous right-hand sides, Kluwer Academic Publishers, 1988. https://doi.org/10.1007/978-94-015-7793-9 |
| [6] |
Y. A. Kuznetsov, S. Rinaldi, A. Gragnani, One parameter bifurcations in planar filippov systems, Int. J. Bifurcat. Chaos, 13 (2003), 2157–2188. https://doi.org/10.1142/S0218127403007874 doi: 10.1142/S0218127403007874

|
| [7] |
E. Freire, E. Ponce, F. Torres, On the critical crossing cycle bifurcation in planar filippov systems, J. Differ. Equations, 259 (2015), 7086–7107. https://doi.org/10.1016/j.jde.2015.08.013 doi: 10.1016/j.jde.2015.08.013
|
| [8] |
Y. Yang, X. Liao, Filippov hindmarsh-rose neuronal model with threshold policy control, IEEE T. Neur. Net. Lear., 30 (2018), 306–311. https://doi.org/10.1109/TNNLS.2018.2836386 doi: 10.1109/TNNLS.2018.2836386
|
| [9] |
H. Zhou, S. Tang, Bifurcation dynamics on the sliding vector field of a filippov ecological system, Appl. Math. Comput., 424 (2022), 127052. https://doi.org/10.1016/j.amc.2022.127052 doi: 10.1016/j.amc.2022.127052
|
| [10] |
J. Castillo, J. Llibre, F. Verduzco, The pseudo-hopf bifurcation for planar discontinuous piecewise linear differential systems, Nonlinear Dyn., 90 (2017), 1829–1840. https://doi.org/10.1007/s11071-017-3766-9 doi: 10.1007/s11071-017-3766-9
|
| [11] |
J. M. Islas, J. Castillo, B. Aguirre-Hernandez, F. Verduzco, Pseudo-hopf bifurcation for a class of 3d filippov linear systems, Int. J. Bifurcat. Chaos, 31 (2021), 2150025. https://doi.org/10.1142/S0218127421500255 doi: 10.1142/S0218127421500255
|
| [12] |
D. D. Novaes, L. A. Silva, On the cyclicity of monodromic tangential singularities: A look beyond the pseudo-hopf bifurcation, J. Nonlinear Sci., 33 (2023), 189–215. https://doi.org/10.48550/arXiv.2303.06027 doi: 10.48550/arXiv.2303.06027
|
| [13] |
J. Castillo, The pseudo-hopf bifurcation and derived attractors in 3d filippov linear systems with a teixeira singularity, Chaos, 30 (2020), 113101. https://doi.org/10.1063/5.0014830 doi: 10.1063/5.0014830
|
| [14] |
L. Li, Three crossing limit cycles in planar piecewise linear systems with saddle-focus type, Electron. J. Qual. Theo., 2014 (2014), 1–14. https://doi.org/10.14232/ejqtde.2014.1.70 doi: 10.14232/ejqtde.2014.1.70
|
| [15] |
E. Ponce, J. Ros, E. Vela, The boundary focus-saddle bifurcation in planar piecewise linear systems. application to the analysis of memristor oscillators, Nonlinear Anal. Real World Appl., 43 (2018), 495–514. https://doi.org/10.1016/j.nonrwa.2018.03.011 doi: 10.1016/j.nonrwa.2018.03.011
|
| [16] |
J. Wang, C. Huang, L. Huang, Discontinuity-induced limit cycles in a general planar piecewise linear system of saddle-focus type, Nonlinear Anal. Hybrid Syst., 33 (2019), 162–178. https://doi.org/10.1016/j.nahs.2019.03.004 doi: 10.1016/j.nahs.2019.03.004
|
| [17] | S.-M. Huan, X.-S. Yang, Existence of limit cycles in general planar piecewise linear systems of saddle-saddle dynamics, Nonlinear Anal., 92 (2013), 82–95. https://doi.org/10.1016/j.na.2013.06.017 Get rights and content |
| [18] |
S. M. Huan, X. S. Yang, On the number of limit cycles in general planar piecewise linear systems of node-node types, J. Math. Anal. Appl., 411 (2014), 340–353. https://doi.org/10.1016/j.jmaa.2013.08.064 doi: 10.1016/j.jmaa.2013.08.064
|
| [19] |
J. Wang, X. Chen, L. Huang, The number and stability of limit cycles for planar piecewise linear systems of node-saddle type, J. Math. Anal. Appl., 469 (2019), 405–427. https://doi.org/10.1016/j.jmaa.2018.09.024 doi: 10.1016/j.jmaa.2018.09.024
|
| [20] |
J. Llibre, E. Ponce, F. Torres, On the existence and uniqueness of limit cycles in liénard differential equations allowing discontinuities, Nonlinearity, 21 (2008), 2121–2142. https://doi.org/10.1088/0951-7715/21/9/013 doi: 10.1088/0951-7715/21/9/013
|
| [21] |
E. Freire, E. Ponce, F. Torres, Canonical discontinuous planar piecewise linear systems, SIAM J. Appl. Dyn. Syst., 11 (2012), 181–211. https://doi.org/10.1137/11083928X doi: 10.1137/11083928X
|
| [22] |
F. Jiang, M. Han, Qualitative analysis of crossing limit cycles in discontinuous liénard-type differential systems, J. Nonlinear Model. Anal., 1 (2019), 527–543. https://doi.org/10.12150/jnma.2019.527 doi: 10.12150/jnma.2019.527
|
| [23] |
R. Cristiano, D. Pagano, T. Carvalho, D. J. Tonon, Bifurcations at a degenerate two-fold singularity and crossing limit cycles, J. Differ. Equations, 268 (2019), 115–140. https://doi.org/10.1016/j.jde.2019.08.024 doi: 10.1016/j.jde.2019.08.024
|
| [24] |
L. F. Gouveia, J. Torregrosa, 24 crossing limit cycles in only one nest for piecewise cubic systems, Appl. Math. Lett., 103 (2020), 106189. https://doi.org/10.1016/j.aml.2019.106189 doi: 10.1016/j.aml.2019.106189
|
| [25] |
J. L. Cardoso, J. Llibre, D. D. Novaes, D. J. Tonon, Simultaneous occurrence of sliding and crossing limit cycles in piecewise linear planar vector fields, Dyn. Syst., 2020 (2020), 1722064. https://doi.org/10.1080/14689367.2020.1722064 doi: 10.1080/14689367.2020.1722064
|
| [26] |
R. Benterki, J. Llibre, Crossing limit cycles of planar piecewise linear hamiltonian systems without equilibrium points, Mathematics, 8 (2020), 8050755. https://doi.org/10.3390/math8050755 doi: 10.3390/math8050755
|
| [27] |
Z. Jin, Crossing limit cycles of planar piecewise hamiltonian systems with linear centers separated by two parallel straight lines, J. Appl. Math. Phys., 11 (2023), 1429–1447. https://doi.org/10.4236/jamp.2023.115093 doi: 10.4236/jamp.2023.115093
|
| [28] |
M. Colombo, E. di Bernardo, E. Fossas, M. Jeffrey, Teixeira singularities in 3d switched feedback control systems, Syst. Control Lett., 59 (2010), 615–622. https://doi.org/10.1016/j.sysconle.2010.07.006 doi: 10.1016/j.sysconle.2010.07.006
|
| [29] |
A. Colombo, M. R. Jeffrey, Nondeterministic chaos, and the two-fold singularity in piecewise smooth flows, SIAM J. Appl. Dyn. Syst., 10 (2011), 423–451. https://doi.org/10.1137/100801846 doi: 10.1137/100801846
|
| [30] |
R. Cristiano, E. Ponce, D. J. Pagano, M. Granzotto, On the teixeira singularity bifurcation in a dc–dc power electronic converter, Nonlinear Dyn., 96 (2019), 1243–1266. https://doi.org/10.1007/s11071-019-04851-8 doi: 10.1007/s11071-019-04851-8
|
| [31] |
R. Cristiano, D. J. Pagano, E. Freire, E. Ponce, Revisiting the teixeira singularity bifurcation analysis: Application to the control of power converters, Int. J. Bifurcat. Chaos, 28 (2018), 1850106. https://doi.org/10.1142/S0218127418501067 doi: 10.1142/S0218127418501067
|
| [32] |
H. Bao, A. Hu, W. Liu, B. Bao, Hidden bursting firings and bifurcation mechanisms in memristive neuron model with threshold electromagnetic induction, IEEE Trans. Neural Netw. Learn. Syst., 31 (2020), 502–511. https://doi.org/10.1109/TNNLS.2019.2905137 doi: 10.1109/TNNLS.2019.2905137
|
| [33] |
Z. Tabekoueng Njitacke, J. Kengne, H. B. Fotsin, Coexistence of multiple stable states and bursting oscillations in a 4d hopfield neural network, Circuits Syst. Signal Process., 39 (2020), 3424–3444. https://doi.org/10.1007/s00034-019-01324-6 doi: 10.1007/s00034-019-01324-6
|
| [34] |
H. Lin, C. Wang, C. Chen, Y. Sun, C. Zhou, C. Xu, Q. Hong, Neural bursting and synchronization emulated by neural networks and circuits, IEEE Trans. Circuits Syst. I, 68 (2021), 3397–3410. https://doi.org/10.1109/TCSI.2021.3081150 doi: 10.1109/TCSI.2021.3081150
|
| [35] |
Y. Li, Z. Wei, T. Kapitaniak, W. Zhang, Stochastic bifurcation and chaos analysis for a class of ships rolling motion under non-smooth perturbation and random excitation, Ocean Eng., 266 (2022), 112859. https://doi.org/10.1016/j.oceaneng.2022.112859 doi: 10.1016/j.oceaneng.2022.112859
|
| [36] |
Y. Wu, L. Wu, Y. Zhu, M. Yi, L. Lu, Enhancing weak signal propagation by intra- and inter-layer global couplings in a feedforward network, Chaos Soliton. Fract., 181 (2024), 114566. https://doi.org/10.1016/j.chaos.2024.114566 doi: 10.1016/j.chaos.2024.114566
|
| [37] |
J. L. Hindmarsh, R. M. Rose, A model of neuronal bursting using three coupled first order differential equations, P. Roy. Soc. Lond. B., 221 (1984), 87–102. https://doi.org/10.1098/rspb.1984.0024 doi: 10.1098/rspb.1984.0024
|
| [38] | E. M. Izhikevich, Neural excitability, spiking and bursting, Int. J. Bifurcat. Chaos, 10 (2000), 1171–1266. https://doi.org/10.1142/S0218127400000840 |
| [39] | E. M. Izhikevich, Which model to use for cortical spiking neurons? IEEE Trans. Neural Netw., 15 (2004), 1063–1070. https://doi.org/10.1109/TNN.2004.832719 |
Figures(9)

Yi Yang, Rongfeng Li, Xiangguang Dai, Haiqing Li, Changcheng Xiang. Exploring dynamic behavior and bifurcations in a Filippov neuronal system with a double-tangency singularity[J]. AIMS Mathematics, 2024, 9(7): 18984-19014. doi: 10.3934/math.2024924







 DownLoad:
DownLoad: