In this paper, we proposed a reachable set control method for a class of Markov jump cyber-physical systems (MJCPSs) with time-varying delays, which addressed the challenges posed by false data injection (FDI) attacks to system security. The goal was to find the set of regions where all MJCPSs states were reachable from the origin in the presence of bounded disturbances. The adaptive event-triggered control strategy was introduced to save network resources. It also reduced the impact of FDI attacks and external disturbances on system security. The conservatism of the results were reduced by constructing the Lyapunov-Krasovskii (L-K) functional with time-varying delays. Difference terms were estimated by using the discrete Wirtinger inequality and the improved extended reciprocally convex matrix inequality, and the ellipsoid reachable set of the MJCPS was obtained. Then, the reachable set controller was obtained by linear matrix inequalities (LMIs) solving technique. Finally, an example simulation proved the validity of the results.
Citation: Sheng-Ran Jia, Wen-Juan Lin. Adaptive event-triggered reachable set control for Markov jump cyber-physical systems with time-varying delays[J]. AIMS Mathematics, 2024, 9(9): 25127-25144. doi: 10.3934/math.20241225
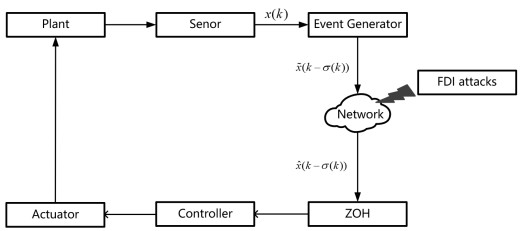
In this paper, we proposed a reachable set control method for a class of Markov jump cyber-physical systems (MJCPSs) with time-varying delays, which addressed the challenges posed by false data injection (FDI) attacks to system security. The goal was to find the set of regions where all MJCPSs states were reachable from the origin in the presence of bounded disturbances. The adaptive event-triggered control strategy was introduced to save network resources. It also reduced the impact of FDI attacks and external disturbances on system security. The conservatism of the results were reduced by constructing the Lyapunov-Krasovskii (L-K) functional with time-varying delays. Difference terms were estimated by using the discrete Wirtinger inequality and the improved extended reciprocally convex matrix inequality, and the ellipsoid reachable set of the MJCPS was obtained. Then, the reachable set controller was obtained by linear matrix inequalities (LMIs) solving technique. Finally, an example simulation proved the validity of the results.

| [1] |
V. Gunes, S. Peter, T. Givargis, F. Vahid, A survey on concepts, applications, and challenges in cyber-physical systems, KSII T. Internet Inf., 8 (2014), 4242–4268. https://doi.org/10.3837/tiis.2014.12.001 doi: 10.3837/tiis.2014.12.001

|
| [2] |
M. S. Ali, S. Arik, R. Saravanakumar, Delay-dependent stability criteria of uncertain Markovian jump neural networks with discrete interval and distributed time-varying delays, Neurocomputing, 158 (2015), 167–173. https://doi.org/10.1016/j.neucom.2015.01.056 doi: 10.1016/j.neucom.2015.01.056
|
| [3] |
M. Q. Xing, Y. Q. Wang, G. M. Zhuang, F. Chen, Event-based asynchronous and resilient filtering for singular Markov jump LPV systems against deception attacks, Appl. Math. Comput., 403 (2021), 126176. https://doi.org/10.1016/j.amc.2021.126176 doi: 10.1016/j.amc.2021.126176
|
| [4] |
H. Y. Chen, G. D. Zong, X. Liu, X. D. Zhao, B. Niu, F. Z. Gao, A sub-domain-awareness adaptive probabilistic event-triggered policy for attack-compensated output control of Markov jump CPSs with dynamically matching modes, IEEE T. Autom. Sci. Eng., 21 (2024), 4419–4431. https://doi.org/10.1109/TASE.2023.3296259 doi: 10.1109/TASE.2023.3296259
|
| [5] |
W. H. Qi, C. Y. Lv, J. H. Park, G. D. Zong, J. Cheng, K. B. Shi, SMC for Semi-Markov jump cyber-physical systems subject to randomly occurring deception attacks, IEEE T. Circuits-Ⅱ, 69 (2022), 159–163. https://doi.org/10.1109/TCSII.2021.3076132 doi: 10.1109/TCSII.2021.3076132
|
| [6] |
H. Y. Yang, H. G. Han, S. Yin, H. Y. Han, P. Wang, Sliding mode-based adaptive resilient control for Markovian jump cyber-physical systems in face of simultaneous actuator and sensor attacks, Automatica, 142 (2022), 110345. https://doi.org/10.1016/j.automatica.2022.110345 doi: 10.1016/j.automatica.2022.110345
|
| [7] |
H. Q. Lu, X. W. Wang, W. N. Zhou, Y. X. Gou, Hybrid-driven-based $H_{\infty }$ filtering for networked systems under randomly occurring deception attacks, J. Franklin Ⅰ., 359 (2022), 6544–6566. https://doi.org/10.1016/j.jfranklin.2022.05.049 doi: 10.1016/j.jfranklin.2022.05.049
|
| [8] |
H. L. Ren, G. D. Zong, X. L. Qian, W. C. Yue, K. B. Shi, Hybrid event-based asynchronous finite-time control for cyber-physical switched systems under denial-of-service attacks, J. Franklin Ⅰ., 360 (2023), 1036–1057. https://doi.org/10.1016/j.jfranklin.2022.11.028 doi: 10.1016/j.jfranklin.2022.11.028
|
| [9] |
Z. H. Pang, L. Z. Fan, J. Sun, K. Liu, G. P. Liu, Detection of stealthy false data injection attacks against networked control systems via active data modification, Inform. Sciences, 546 (2021), 192–205. https://doi.org/10.1016/j.ins.2020.06.074 doi: 10.1016/j.ins.2020.06.074
|
| [10] |
W. J. Lin, Y. He, M. Wu, Q. P. Liu, Reachable set estimation for Markovian jump neural networks with time-varying delay, Neural Networks, 108 (2018), 527–532. https://doi.org/10.1016/j.neunet.2018.09.011 doi: 10.1016/j.neunet.2018.09.011
|
| [11] |
Q. R. Zhang, K. Liu, Z. H. Pang, Y. Q. Xia, T. Liu, Reachability analysis of cyber-physical systems under stealthy attacks, IEEE T. Cybernetics, 52 (2022), 4926–4934. https://doi.org/10.1109/TCYB.2020.3025307 doi: 10.1109/TCYB.2020.3025307
|
| [12] |
X. Y. Fan, W. J. Lin, Z. Liu, L. Zhao, Reachable set control for nonlinear Markov jump cyber-physical systems with false data injection attacks, J. Franklin Ⅰ., 361 (2024), 224–233. https://doi.org/10.1016/j.jfranklin.2023.12.013 doi: 10.1016/j.jfranklin.2023.12.013
|
| [13] |
F. Farivar, M. S. Haghighi, A. Jolfaei, M. Alazab, Artificial intelligence for detection, estimation, and compensation of malicious attacks in nonlinear cyber-physical systems and industrial IoT, IEEE T. Ind. Inform., 16 (2020), 2716–2725. https://doi.org/10.1109/TII.2019.2956474 doi: 10.1109/TII.2019.2956474
|
| [14] |
J. X. Hu, G. Q. Tan, L. Liu, A new result on $H_{\infty }$ state estimation for delayed neural networks based on an extended reciprocally convex inequality, IEEE T. Circuits-II, 71 (2024), 1181–1185. https://doi.org/10.1109/TCSII.2023.3323834 doi: 10.1109/TCSII.2023.3323834
|
| [15] |
C. C. Qin, W. J. Lin, Adaptive event-triggered fault-tolerant control for Markov jump nonlinear systems with time-varying delays and multiple faults, Commun. Nonlinear Sci., 128 (2024), 107655. https://doi.org/10.1016/j.cnsns.2023.107655 doi: 10.1016/j.cnsns.2023.107655
|
| [16] |
G. Q. Tan, Z. S. Wang, Stability analysis of recurrent neural networks with time-varying delay based on a flexible negative-determination quadratic function method, IEEE T. Neur. Net. Lear., 2023 (2023), 1–6. https://doi.org/10.1109/TNNLS.2023.3327318 doi: 10.1109/TNNLS.2023.3327318
|
| [17] |
X. Jin, W. M. Haddad, T. Yucelen, An adaptive control architecture for mitigating sensor and actuator attacks in cyber-physical systems, IEEE T. Automat. Contr., 62 (2017), 6058–6064. https://doi.org/10.1109/TAC.2017.2652127 doi: 10.1109/TAC.2017.2652127
|
| [18] |
S. A. Karthick, B. S. Chen, Hybrid-triggered and fault-tolerant observer-based control for neural networks under malicious attacks, Neurocomputing, 532 (2023), 114–128. https://doi.org/10.1016/j.neucom.2023.02.009 doi: 10.1016/j.neucom.2023.02.009
|
| [19] |
W. L. He, Z. K. Mo, Secure event-triggered consensus control of linear multiagent systems subject to sequential scaling attacks, IEEE T. Cybernetics, 52 (2022), 10314–10327. https://doi.org/10.1109/TCYB.2021.3070356 doi: 10.1109/TCYB.2021.3070356
|
| [20] |
K. X. Sun, Y. Q. Wang, G. M. Zhuang, J. H. Wang, Asynchronous secure controller design for singularly perturbation stochastic semi-Markov jump CPSs with the memory-based dynamic event-triggered scheme against complex cyber-attacks, Commun. Nonlinear Sci., 125 (2023), 107408. https://doi.org/10.1016/j.cnsns.2023.107408 doi: 10.1016/j.cnsns.2023.107408
|
| [21] |
Q. Zhang, Z. W. Guo, Y. Y. Zhu, P. Vijayakumar, A. Castiglione, B. B. Gupta, A deep learning-based fast fake news detection model for cyber-physical social services, Pattern Recogn. Lett., 168 (2023), 31–38. https://doi.org/10.1016/j.patrec.2023.02.026 doi: 10.1016/j.patrec.2023.02.026
|
| [22] |
D. Yue, E. G. Tian, Q. L. Han, A delay system method for designing event-triggered controllers of networked control systems, IEEE T. Automat. Contr., 58 (2013), 475–481. https://doi.org/10.1109/TAC.2012.2206694 doi: 10.1109/TAC.2012.2206694
|
| [23] |
R. R. Wu, N. F. Zhong, M. H. Sun, Dynamic event-triggered non-fragile filtering for singular Markovian jump systems with packet dropouts, Eur. J. Control, 78 (2024), 101018. https://doi.org/10.1016/j.ejcon.2024.101018 doi: 10.1016/j.ejcon.2024.101018
|
| [24] |
Y. J. Liu, S. H. Liu, Y. Z. Liu, S. M. Lee, Adaptive event-triggered dissipative control for semi-Markovian jump systems with stochastic deception attack, J. Franklin Ⅰ., 360 (2023), 12358–12377. https://doi.org/10.1016/j.jfranklin.2023.09.037 doi: 10.1016/j.jfranklin.2023.09.037
|
| [25] |
W. J. Lin, Q. L. Han, X. M. Zhang, J. P. Yu, Reachable set synthesis of Markov jump systems with time-varying delays and mismatched modes, IEEE T. Circuits-Ⅱ, 69 (2022), 2186–2190. https://doi.org/10.1109/TCSII.2021.3126262 doi: 10.1109/TCSII.2021.3126262
|
| [26] |
A. Seuret, F. Gouaisbaut, Wirtinger-based integral inequality: application to time-delay systems, Automatica, 49 (2013), 2860–2866. https://doi.org/10.1016/j.automatica.2013.05.030 doi: 10.1016/j.automatica.2013.05.030
|
| [27] |
C. K. Zhang, Y. He, L. Jiang, M. Wu, Q. G. Wang, An extended reciprocally convex matrix inequality for stability analysis of systems with time-varying delay, Automatica, 85 (2017), 481–485. https://doi.org/10.1016/j.automatica.2017.07.056 doi: 10.1016/j.automatica.2017.07.056
|
| [28] |
N. Malone, H. T. Chiang, K. Lesser, M. Oishi, L. Tapia, Hybrid dynamic moving obstacle avoidance using a stochastic reachable set-based potential field, IEEE T. Robot., 33 (2017), 1124–1138. https://doi.org/10.1109/TRO.2017.2705034 doi: 10.1109/TRO.2017.2705034
|
| [29] |
X. L. Wang, J. W. Xia, J. Wang, Z. Wang, J. Wang, Reachable set estimation for Markov jump LPV systems with time delays, Appl. Math. Comput., 376 (2020), 125117. https://doi.org/10.1016/j.amc.2020.125117 doi: 10.1016/j.amc.2020.125117
|
| [30] |
H. Y. Chen, G. D. Zong, F. Z. Gao, Y. Shi, Probabilistic event-triggered policy for extended dissipative finite-time control of MJSs under cyber-attacks and actuator failures, IEEE T. Automat. Contr., 68 (2023), 7803–7810. https://doi.org/10.1109/TAC.2023.3246429 doi: 10.1109/TAC.2023.3246429
|





Figures(6)

Sheng-Ran Jia, Wen-Juan Lin. Adaptive event-triggered reachable set control for Markov jump cyber-physical systems with time-varying delays[J]. AIMS Mathematics, 2024, 9(9): 25127-25144. doi: 10.3934/math.20241225







 DownLoad:
DownLoad: