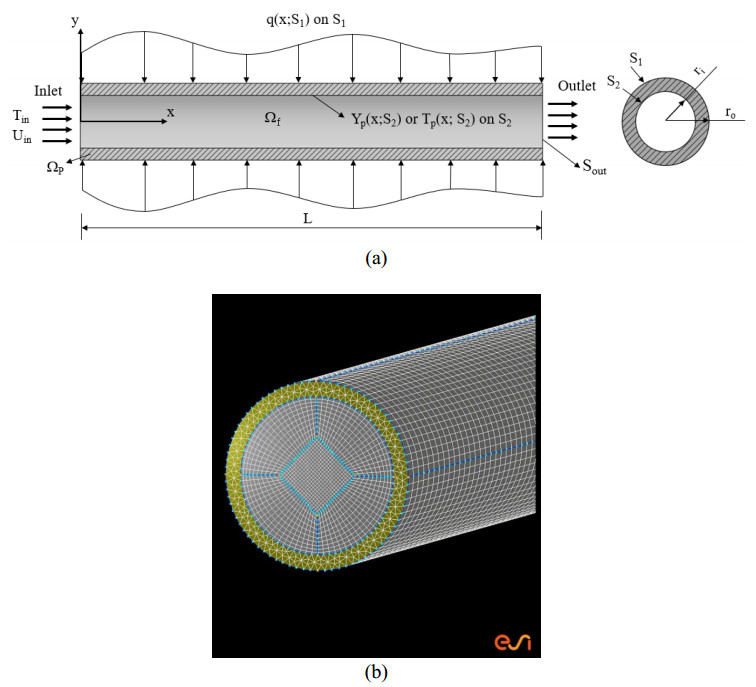
The primary goal of this study is to achieve isothermal temperature control of the fluid at the outlet of a circular pipe through a gradient-based method. Typically, temperatures are set on the outer wall of the pipe to warm the fluid and achieve the desired uniformly consistent exit temperature. However, maintaining a constant temperature on the outer wall of the pipe is challenging due to the heat exchange between the fluid and the wall, as well as external environmental factors. Thus, in this current investigation, the temperature distribution is designated along the inner pipe wall to heat the fluid, employing an optimization algorithm to deduce the appropriate optimal heating function on the outer wall. This enables the attainment of the specified temperature on the inner wall. To guarantee consistent temperature control during optimal heating procedures across extensive distances or expansive areas, a gradient-based optimization technique is employed. In the context of a smaller pipe diameter scenario, applying the designated floor function temperature distribution produces the most accurate outcomes for exit temperatures at the pipe exit. The assessed heating function exhibits abrupt surges and disjointed behaviors, which can be alleviated by introducing a weight coefficient into the cost function. This adaptation preserves the precision of exit temperature and its uniformity. In the context of a larger pipe diameter scenario, while adhering to the floor function temperature specification, the estimated exit temperature remains precise, and the uniformity reaches a contentedly acceptable level. This implies that a larger pipe diameter could potentially require a lengthened tube to enhance the uniformity of exit temperatures.
Citation: Cheng-Hung Huang, Tsung-Yi Lee. Predicting the optimal heating function for uniform exit temperature in a pipe flow[J]. AIMS Mathematics, 2024, 9(1): 1997-2021. doi: 10.3934/math.2024099
The primary goal of this study is to achieve isothermal temperature control of the fluid at the outlet of a circular pipe through a gradient-based method. Typically, temperatures are set on the outer wall of the pipe to warm the fluid and achieve the desired uniformly consistent exit temperature. However, maintaining a constant temperature on the outer wall of the pipe is challenging due to the heat exchange between the fluid and the wall, as well as external environmental factors. Thus, in this current investigation, the temperature distribution is designated along the inner pipe wall to heat the fluid, employing an optimization algorithm to deduce the appropriate optimal heating function on the outer wall. This enables the attainment of the specified temperature on the inner wall. To guarantee consistent temperature control during optimal heating procedures across extensive distances or expansive areas, a gradient-based optimization technique is employed. In the context of a smaller pipe diameter scenario, applying the designated floor function temperature distribution produces the most accurate outcomes for exit temperatures at the pipe exit. The assessed heating function exhibits abrupt surges and disjointed behaviors, which can be alleviated by introducing a weight coefficient into the cost function. This adaptation preserves the precision of exit temperature and its uniformity. In the context of a larger pipe diameter scenario, while adhering to the floor function temperature specification, the estimated exit temperature remains precise, and the uniformity reaches a contentedly acceptable level. This implies that a larger pipe diameter could potentially require a lengthened tube to enhance the uniformity of exit temperatures.

| [1] |
L. Perez-Lombard, J. Ortiz, C. Pout, A review on buildings energy consumption information, Energ. Buildings, 40 (2008), 394−398. https://doi.org/10.1016/j.enbuild.2007.03.007 doi: 10.1016/j.enbuild.2007.03.007

|
| [2] |
S. K. Kim, W. H. Hong, J. H. Hwang, M. S. Jung, Y. S. Park, Optimal control method for HVAC systems in offices with a control algorithm based on thermal environment, Buildings-Basel, 10 (2020), 12. https://doi.org/10.3390/buildings10050095 doi: 10.3390/buildings10050095
|
| [3] |
N. Alamoodi, P. Daoutidis, Nonlinear control of coal-fired steam power plants, Control Eng. Pract., 60 (2017), 63−75. https://doi.org/10.1016/j.conengprac.2016.12.005 doi: 10.1016/j.conengprac.2016.12.005
|
| [4] |
H. Kim, E. K. Kim, J. Kim, K. S. Lee, S. Kim, Y. Han, Prediction-based feedforward control of superheated steam temperature of a power plant, Int. J. Elec. Power, 71 (2015), 351−357. https://doi.org/10.1016/j.ijepes.2015.03.022 doi: 10.1016/j.ijepes.2015.03.022
|
| [5] | A. Sanchez-Lopez, G. Arroyo-Figueroa, A. Villavicencio-Ramirez, Advanced control algorithms for steam temperature regulation of thermal power plants, Int. J. Elec. Power, 26 (2004), 779−785. https://doi.org/10.1016/j.ijepes.2015.03.022 |
| [6] | V. Torres-Costa, C. de Melo, A. Climent-Font, F. Argullo-Rueda, O. de Melo, Isothermal close space sublimation for Ⅱ-Ⅵ semiconductor filling of porous matrices, Nanoscale Res. Lett., 7 (2012), 6. https://doi.org/10.1186/1556-276x-7-409 |
| [7] |
J. C. A. Huang, W. T. K. Chien, C. H. J. Huang, Some practical concerns on isothermal electromigration tests, IEEE Trans. Semicond. Manuf., 14 (2001), 387−394. https://doi.org/10.1109/66.964326 doi: 10.1109/66.964326
|
| [8] | O. M. Alifanov, Inverse heat transfer problems, Springer Science & Business Media, 2012. |
| [9] |
C. J. Chen, M. N. Ozisik, Optimal heating of a slab with a plane heat source of timewise varying strength, Numer. Heat Tr., 21 (1992), 351−361. https://doi.org/10.1080/10407789208944881 doi: 10.1080/10407789208944881
|
| [10] |
C. J. Chen, M. N. Ozisik, Optimal heating of a slab with two plan heat sources of timewise varying strength, J. Frank. I., 329 (1992), 195−206. https://doi.org/10.1016/0016-0032(92)90028-F doi: 10.1016/0016-0032(92)90028-F
|
| [11] |
C. J. Chen, M. N. Ozisik, Optimal convective heating of a hollow cylinder with temperature dependent thermal conductivity, Appl. Sci. Res., 52 (1994), 67−79. https://doi.org/10.1080/10407790.2010.541354 doi: 10.1080/10407790.2010.541354
|
| [12] |
C. H. Huang, A non-linear optimal control problem in determining the strength of the optimal boundary heat fluxes, Numer. Heat Tr., 40 (2001), 411−429. https://doi.org/10.1080/104077901753243197 doi: 10.1080/104077901753243197
|
| [13] | CFD-ACE+ user's manual, ESI-CFD Inc., 2020. |













Figures(14) / Tables(1)

Cheng-Hung Huang, Tsung-Yi Lee. Predicting the optimal heating function for uniform exit temperature in a pipe flow[J]. AIMS Mathematics, 2024, 9(1): 1997-2021. doi: 10.3934/math.2024099







 DownLoad:
DownLoad: