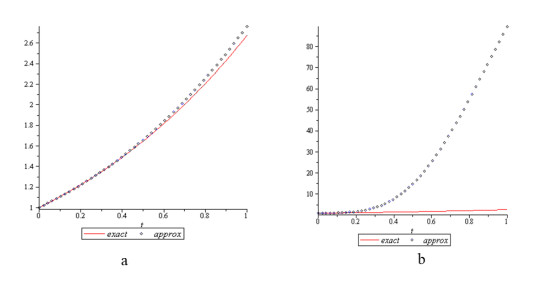
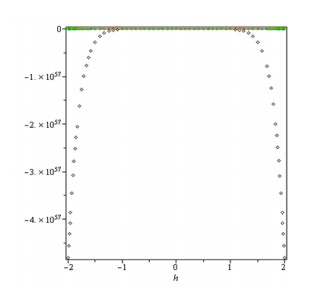
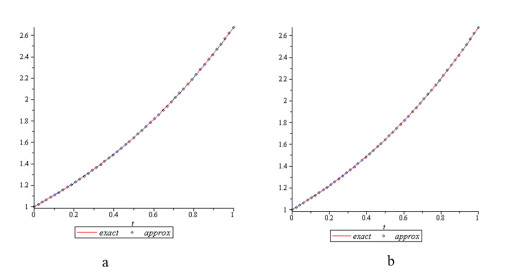
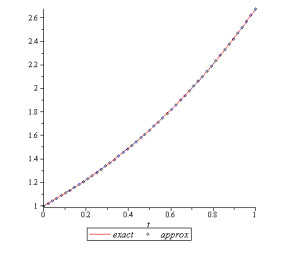
Mathematical applications in engineering have a long history. One of the most well-known analytical techniques, the optimal variational iteration method (OVIM), is utilized to construct a quick and accurate algorithm for a special fourth-order ordinary initial value problem. Many researchers have discussed the problem involving a parameter c. We solve the parametric boundary value problem that can't be addressed using conventional analytical methods for greater values of c using a new method and a convergence control parameter h. We achieve a convergent solution no matter how huge c is. For the approximation of the convergence control parameter h, two strategies have been discussed. The advantages of one technique over another have been demonstrated. Optimal variational iteration method can be seen as an effective technique to solve parametric boundary value problem.
Citation: Qura Tul Ain, Muhammad Nadeem, Shazia Karim, Ali Akgül, Fahd Jarad. Optimal variational iteration method for parametric boundary value problem[J]. AIMS Mathematics, 2022, 7(9): 16649-16656. doi: 10.3934/math.2022912
Mathematical applications in engineering have a long history. One of the most well-known analytical techniques, the optimal variational iteration method (OVIM), is utilized to construct a quick and accurate algorithm for a special fourth-order ordinary initial value problem. Many researchers have discussed the problem involving a parameter c. We solve the parametric boundary value problem that can't be addressed using conventional analytical methods for greater values of c using a new method and a convergence control parameter h. We achieve a convergent solution no matter how huge c is. For the approximation of the convergence control parameter h, two strategies have been discussed. The advantages of one technique over another have been demonstrated. Optimal variational iteration method can be seen as an effective technique to solve parametric boundary value problem.

| [1] |
Q. T. Ain, N. Anjum, A. Din, A. Zeb, S. Djilali, Z. A. Khan, On the analysis of Caputo fractional order dynamics of Middle East Lungs Coronavirus (MERS-CoV) model, Alex. Eng. J., 61 (2022), 5123–5131. https://doi.org/10.1016/j.aej.2021.10.016 doi: 10.1016/j.aej.2021.10.016

|
| [2] |
Q. T. Ain, A. Khan, M. I. Ullah, M. A. Alqudah, T. Abdeljawad, On fractional impulsive system for methanol detoxification in human body, Chaos Soliton. Fract., 160 (2022), 112235. https://doi.org/10.1016/j.chaos.2022.112235 doi: 10.1016/j.chaos.2022.112235
|
| [3] |
Q. T. Ain, T. Sathiyaraj, S. Karim, M. Nadeem, P. K. Mwanakatwe, ABC fractional derivative for the alcohol drinking model using two-scale fractal dimension, Complexity, 2022 (2022), 8531858. https://doi.org/10.1155/2022/8531858 doi: 10.1155/2022/8531858
|
| [4] |
A. Din, Q. T. Ain, Stochastic optimal control analysis of a mathematical model: Theory and application to non-singular kernels, Fractal Fract., 6 (2022), 279. https://doi.org/10.3390/fractalfract6050279 doi: 10.3390/fractalfract6050279
|
| [5] |
S. Abbasbandy, E. Shivanian, K. Vajravelu, Mathematical properties of $\hbar $-curve in the frame work of the homotopy analysis method, Commun. Nonlinear Sci. Numer. Simul., 16 (2011), 4268–4275. https://doi.org/10.1016/j.cnsns.2011.03.031 doi: 10.1016/j.cnsns.2011.03.031
|
| [6] |
M. A. Abdou, A. A. Soliman, New applications of variational iteration method, Physica D, 211 (2005), 1–8. https://doi.org/10.1016/j.physd.2005.08.002 doi: 10.1016/j.physd.2005.08.002
|
| [7] |
M. A. Abdou, A. A. Soliman, Variational iteration method for solving Burger's and coupled Burger's equations, J. Comput. Appl. Math., 181 (2005), 245–251. https://doi.org/10.1016/j.cam.2004.11.032 doi: 10.1016/j.cam.2004.11.032
|
| [8] |
S. Das, Analytical solution of a fractional diffusion equation by variational iteration method, Comput. Math. Appl., 57 (2009), 483–487. https://doi.org/10.1016/j.camwa.2008.09.045 doi: 10.1016/j.camwa.2008.09.045
|
| [9] |
J. H. He, Variational iteration method—some recent results and new interpretations, J. Comput. Appl. Math., 207 (2007), 3–17. https://doi.org/10.1016/j.cam.2006.07.009 doi: 10.1016/j.cam.2006.07.009
|
| [10] |
J. H. He, Variational iteration method for autonomous ordinary differential systems, Appl. Math. Comput., 114 (2000), 115–123. https://doi.org/10.1016/S0096-3003(99)00104-6 doi: 10.1016/S0096-3003(99)00104-6
|
| [11] |
J. H. He, Variational iteration method—a kind of non-linear analytical technique: Some examples, Int. J. Nonlin. Mech., 34 (1999), 699–708. https://doi.org/10.1016/S0020-7462(98)00048-1 doi: 10.1016/S0020-7462(98)00048-1
|
| [12] |
A. Golbabai, M. Javidi, Application of homotopy perturbation method for solving eighth-order boundary value problems, Appl. Math. Comput., 191 (2007), 334–346. https://doi.org/10.1016/j.amc.2007.02.091 doi: 10.1016/j.amc.2007.02.091
|
| [13] | M. Inokuti, H. Sekine, T. Mura, General use of the Lagrange multiplier in nonlinear mathematical physics, Var. Method Mech. solids, 33 (1978), 156–162. |
| [14] |
S. Momani, Z. Odibat, Comparison between the homotopy perturbation method and the variational iteration method for linear fractional partial differential equations, Comput. Math. Appl., 54 (2007), 910–919. https://doi.org/10.1016/j.camwa.2006.12.037 doi: 10.1016/j.camwa.2006.12.037
|
| [15] |
Z. M. Odibat, S. Momani, Application of variational iteration method to nonlinear differential equations of fractional order, Int. J. Nonlinear Sci. Numer. Simul., 7 (2006), 27–34. https://doi.org/10.1515/IJNSNS.2006.7.1.27 doi: 10.1515/IJNSNS.2006.7.1.27
|
| [16] |
M. Turkyilmazoglu, An optimal variational iteration method, Appl. Math. Lett., 24 (2011), 762–765. https://doi.org/10.1016/j.aml.2010.12.032 doi: 10.1016/j.aml.2010.12.032
|
| [17] |
S. Momani, M. A. Noor, Numerical comparison of methods for solving a special fourth-order boundary value problem, Appl. Math. Comput., 191 (2007), 218–224. https://doi.org/10.1016/j.amc.2007.02.081 doi: 10.1016/j.amc.2007.02.081
|
| [18] |
S. X. Liang, D. J. Jeffrey, An efficient analytical approach for solving fourth order boundary value problems, Comput. Phys. Commun., 180 (2009), 2034–2040. https://doi.org/10.1016/j.cpc.2009.06.006 doi: 10.1016/j.cpc.2009.06.006
|
| [19] |
M. Farman, A. Akgül, K. S. Nisar, D. Ahmad, A. Ahmad, S. Kamangar, et al., Epidemiological analysis of fractional order COVID-19 model with Mittag-Leffler kernel, AIMS Mathematics, 7 (2022), 756–783. https://doi.org/10.3934/math.2022046 doi: 10.3934/math.2022046
|
| [20] |
M. M. A. Khater, S. H. Alfalqi, J. F. Alzaidi, S. A. Salama, F. Z. Wang, Plenty of wave solutions to the ill-posed Boussinesq dynamic wave equation under shallow water beneath gravity, AIMS Mathematics, 7 (2022), 54–81. https://doi.org/10.3934/math.2022004 doi: 10.3934/math.2022004
|
Figures(4)

Qura Tul Ain, Muhammad Nadeem, Shazia Karim, Ali Akgül, Fahd Jarad. Optimal variational iteration method for parametric boundary value problem[J]. AIMS Mathematics, 2022, 7(9): 16649-16656. doi: 10.3934/math.2022912







 DownLoad:
DownLoad: