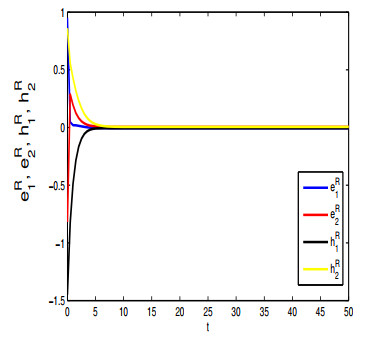
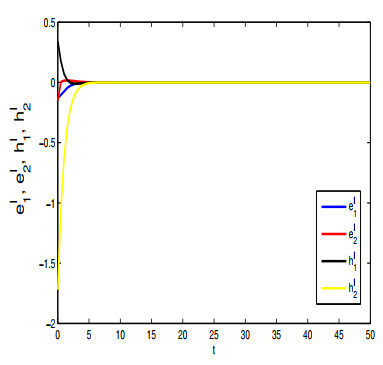
In this paper, the synchronization problem of complex-valued memristive competitive neural networks(CMCNNs) with different time scales is investigated. Based on differential inclusions and inequality techniques, some novel sufficient conditions are derived to ensure synchronization of the drive-response systems by designing a proper controller. Finally, a numerical example is provided to illustrate the usefulness and feasibility of our results.
Citation: Yong Zhao, Shanshan Ren. Synchronization for a class of complex-valued memristor-based competitive neural networks(CMCNNs) with different time scales[J]. Electronic Research Archive, 2021, 29(5): 3323-3340. doi: 10.3934/era.2021041
In this paper, the synchronization problem of complex-valued memristive competitive neural networks(CMCNNs) with different time scales is investigated. Based on differential inclusions and inequality techniques, some novel sufficient conditions are derived to ensure synchronization of the drive-response systems by designing a proper controller. Finally, a numerical example is provided to illustrate the usefulness and feasibility of our results.

| [1] |
Synchronization conditions in simple memristor neural networks. Journal of the Franklin Institute (2015) 352: 3196-3220. 
|
| [2] |
Singularity formation and blowup of complex-valued solutions of the modified KdV equation. Discrete Cont. Dyn. (2013) 33: 4811-4840.
|
| [3] |
Memristor–The missing circuit element. IEEE Trans. Circ. Theor. (1971) 18: 507-519.
|
| [4] |
Improving control effects of absence seizures using single-pulse alternately resetting stimulation (SARS) of corticothalamic circuit. Appl. Math. Mech. -Engl. Ed. (2020) 41: 1287-1302.
|
| [5] |
A. F. Filippov, Differential Equations with Discontinuous Righthand Sides, Kluwer Academic Publishers, Dordrecht, 18 1988. doi: 10.1007/978-94-015-7793-9
|
| [6] |
Global exponential synchronization of memristive competitive neural networks with time-varying delay via nonlinear control. Neural Process. Lett. (2018) 49: 103-119.
|
| [7] |
Excitement and synchronization of small-world neuronal networks with short-term synaptic plasticity. Int. J. Neural Syst. (2011) 21: 415-425.
|
| [8] |
Global Hopf bifurcation analysis on a six-dimensional FitzHugh-Nagumo neural network with delay by a synchronized scheme. Discrete Cont. Dyn. Syst.-B (2011) 16: 457-474.
|
| [9] |
Global anti-synchronization of complex-valued memristive neural networks with time delays. IEEE T. Cybernetics (2019) 49: 1735-1747.
|
| [10] |
Singular perturbation analysis of competitive neural networks with different time scales. Neural. Comput. (1996) 8: 1731-1742.
|
| [11] |
Local and global stability analysis of an unsupervised competitive neural network. IEEE T. Neural Networ. (2008) 19: 346-351.
|
| [12] |
Local exponential stability of competitive neural networks with different time scales. Eng. Appl. Artif. Intell. (2004) 17: 227-232.
|
| [13] |
Anti-synchronization of a class of fuzzy memristive competitive neural networks with different time scales. Neural Process. Lett. (2020) 52: 647-661.
|
| [14] |
Spike synchronization and rate modulation differentially involved in motor cortical function. Science (1997) 278: 1950-1953.
|
| [15] |
Synchronization of memristive competitive neural networks with different time scales. Neural. Comput. and Applic. (2014) 25: 1163-1168.
|
| [16] |
Hybrid memristor chaotic system. J. Nanorlectron. Optoe. (2018) 13: 812-818.
|
| [17] |
Electronics: The fourth element. Nature (2008) 453: 42-43.
|
| [18] |
Complex-valued recurrent correlation neural networks. IEEE Trans. Neural. Netw. Learn. Syst. (2014) 25: 1600-1612.
|
| [19] |
Circuit elements with memory: Memristors, memcapacitors, and meminductors. P. IEEE (2009) 97: 1717-1724.
|
| [20] |
D. Wang, L. Huang and L. Tang, New results for global exponential synchronization in neural networks via functional differential inclusions, Chaos, 25 (2015), 083103, 11 pp. doi: 10.1063/1.4927737
|
| [21] | A review of computational modeling and deep brain stimulation: Applications to Parkinson's disease. Appl. Math. Mech. -Engl. Ed. (2020) 41: 1747-1768. |
| [22] |
Effects of initial conditions on the synchronization of the coupled memristor neural circuits. Nonlinear Dynamics (2019) 95: 1269-1282.
|
| [23] |
W. Zhang, C. Li and T. Huang,, Global robust stability of complex-valued recurrent neural networks with time-delays and uncertainties, Int. J. Biomath., 7 (2014), 1450016. doi: 10.1142/S1793524514500168
|
| [24] |
Input-to-state stability analysis for memristive Cohen-Grossberg-type neural networks with variable time delays. Chaos Soliton. Fract. (2018) 114: 364-369.
|
| [25] |
Exponential stability of a class of competitive neural networks with multi-proportional delays. Neural Process. Lett. (2016) 44: 651-663.
|
| [26] |
Synchronization of memristive complex-valued neural networks with time delays via pinning control method. IEEE T. Cybernetics (2020) 50: 3806-3815.
|
| [27] |
J. Zhuang, Y. Zhou and Y. Xia, Synchronization analysis of drive-response multi-layer dynamical networks with additive couplings and stochastic perturbations, Discrete Cont. Dyn.-S., 14 (2021), 1607–-1629. doi: 10.3934/dcdss.2020279
|
Figures(2)
Yong Zhao, Shanshan Ren. Synchronization for a class of complex-valued memristor-based competitive neural networks(CMCNNs) with different time scales[J]. Electronic Research Archive, 2021, 29(5): 3323-3340. doi: 10.3934/era.2021041







 DownLoad:
DownLoad: