In this paper, a rotating blades equation is considered. The arbitrary pre-twisted angle, arbitrary pre-setting angle and arbitrary rotating speed are taken into account when establishing the rotating blades model. The nonlinear PDEs of motion and two types of boundary conditions are derived by the extended Hamilton principle and the first-order piston theory. The well-posedness of weak solution (global in time) for the rotating blades equation with Clamped-Clamped (C-C) boundary conditions can be proved by compactness method and energy method. Strong energy estimates are derived under additional assumptions on the initial data. In addition, the existence and regularity of weak solutions (global in time) for the rotating blades equation with Clamped-Free (C-F) boundary conditions are proved as well.
Citation: Lin Shen, Shu Wang, Yongxin Wang. The well-posedness and regularity of a rotating blades equation[J]. Electronic Research Archive, 2020, 28(2): 691-719. doi: 10.3934/era.2020036
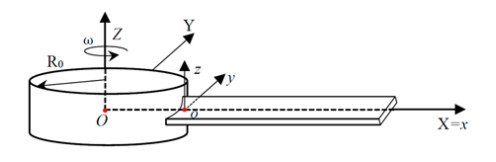
In this paper, a rotating blades equation is considered. The arbitrary pre-twisted angle, arbitrary pre-setting angle and arbitrary rotating speed are taken into account when establishing the rotating blades model. The nonlinear PDEs of motion and two types of boundary conditions are derived by the extended Hamilton principle and the first-order piston theory. The well-posedness of weak solution (global in time) for the rotating blades equation with Clamped-Clamped (C-C) boundary conditions can be proved by compactness method and energy method. Strong energy estimates are derived under additional assumptions on the initial data. In addition, the existence and regularity of weak solutions (global in time) for the rotating blades equation with Clamped-Free (C-F) boundary conditions are proved as well.

| [1] |
On the extensional and flexural vibrations of rotating bars. International Journal of Non-Linear Mechanics (1975) 10: 223-236. 
|
| [2] |
Nonlinear free vibration analysis of rotating composite Timoshenko beams. Composite Structures (2013) 96: 29-43.
|
| [3] |
Analysis of flexural-flexural-torsional nonlinear vibrations of twisted rotating beams with cross-sectional deplanation. Strength of Materials (2009) 41: 200-208.
|
| [4] |
On the cauchy problem for a dynamical Euler's Elastica. Communications in Partial Differential Equations (2013) 28: 271-300.
|
| [5] |
Global existence and asymptotic stability for the nonlinear and generalized damped extensible plate equation. Communications in Contemporary Mathematics (2004) 6: 705-731.
|
| [6] |
Modeling, stabilization and control of serially connected beams. SIAM Journal on Control and Optimization (1987) 25: 526-546.
|
| [7] | Dynamic stability of rotating blades with geometric non-linearity. Journal of Sound and Vibration (1995) 187: 421-433. |
| [8] |
Vibration control of pre-twisted rotating composite thin-walled beams with piezoelectric fiber composites. Journal of Sound and Vibration (2007) 300: 176-196.
|
| [9] |
S. A. Fazelzadeh and M. Hosseini, Aerothermoelastic behavior of supersonic rotating thin-walled beams made of functionally graded materials, Pressure Vessels and Piping Conference, (2006), 227–236. doi: 10.1115/PVP2006-ICPVT-11-93624
|
| [10] |
Vibration analysis of functionally graded thin-walled rotating blades under high temperature supersonic flow using the differential quadrature method. Journal of Sound and Vibration (2007) 306: 333-348.
|
| [11] |
Equations of motion of rotating composite beam with a nonconstant rotation speed and an arbitrary preset angle. Meccanica (2014) 49: 1833-1858.
|
| [12] |
The well-posedness and stability of a beam equation with conjugate variables assigned at the same boundary point. IEEE Transactions on Automatic Control (2005) 50: 2087-2093.
|
| [13] |
Identification of unknown temporal and spatial load distributions in a vibrating Euler-Bernoulli beam from Dirichlet boundary measured data. Automatica J. IFAC (2016) 71: 106-117.
|
| [14] |
Classical solutions of nonlinear beam equations: Existence and stabilization. SIAM Journal on Control and Optimization (2012) 50: 703-719.
|
| [15] |
Fundamental vibration of rotating cantilever blades with pre-twist. Journal of Sound and Vibration (2004) 271: 47-66.
|
| [16] |
Existence, stability and smoothness of a bounded solution for nonlinear time-varying thermoelastic plate equations. Journal of Mathematical Analysis and Applications (2003) 285: 191-211.
|
| [17] |
Analysis of weak solution of Euler-Bernoulli beam with axial force. Applied Mathematics and Computation (2017) 298: 247-260.
|
| [18] |
Boundary controllability of nonlinear beams to bounded states. Proc. Roy. Soc. Edinburgh Sect. A (1991) 119: 63-72.
|
| [19] |
Uniform stabilization of a nonlinear beam by nonlinear boundary feedback. Journal of Differential Equations (1991) 91: 355-388.
|
| [20] |
Thin-walled beams made of functionally graded materials and operating in a high temperature environment: Vibration and stability. Journal of Thermal Stresses (2005) 28: 649-712.
|
| [21] | L. Librescu and O. Song, Thin-walled Composite Beams: Theory and Application, Springer, Dordrecht, 2006. |
| [22] | J.-L. Lions, Quelques Méthodes de Résolution des Problèmes aux Limites non Linéaires, Dunod, Gauthier-Villars, Paris, 1969. |
| [23] | L. Nirenberg, On Elliptic Partial Differential Equations. IL Principio Di Minimo E Sue Applicazioni Alle Equazioni Funzionali, Springer, Berlin, 1959. |
| [24] | A. Holt and Z. Garabed, Piston theory, a new aerodynamic tool for the aeroelastican, Journal of the Aeronautical Sciences, 23 (1956), 1109-1118. |
| [25] |
Effects of pretwist and presetting on coupled bending vibrations of rotating thin-walled composite beams. International Journal of Solids and Structures (2003) 40: 1203-1224.
|
| [26] |
Well-posedness of mindlin-timoshenko plate with nonlinear boundary damping and sources. Applied Mathematics and Optimization (2017) 76: 429-464.
|
| [27] |
Accurate reduced-order models for a simple rotor blade model using nonlinear normal modes. Mathematical and Computer Modelling (2001) 33: 1085-1097.
|
| [28] |
On a shear-deformable theory of anisotropic thin-walled beams: Further contribution and validations. Composite Structures (2002) 56: 345-358.
|
| [29] | O. Rand and S. M. Barkai, A refined nonlinear analysis of pre-twisted composite blades, Composite Structures, 39 (1997), 39-54. |
| [30] |
Compact sets in the space $L^p(0, T; B)$. Annali Di Matematica Pura Ed Applicata (1987) 146: 65-96.
|
| [31] |
Non-linear dynamic response of a rotating radial Timoshenko beam with periodic pulse loading at the free-end. International Journal of Non-Linear Mechanics (2005) 40: 113-149.
|
| [32] |
Free vibration of anisotropic composite thin-walled beams of closed cross-section contour. Journal of Sound and Vibration (1993) 167: 129-147.
|
| [33] |
Structural modeling and free vibration analysis of rotating composite thin-walled beams. Journal of the American Helicopter Society (1997) 42: 358-369.
|
| [34] |
Nonlinear response of a non-rotating rotor blade to a periodic gust. Journal of Fluids and Structures (1996) 10: 721-742.
|
| [35] |
L. Tebou, Well-posedness and stability of a hinged plate equation with a localized nonlinear structural damping, Nonlinear Anal., 71 (2009), e2288–e2297. doi: 10.1016/j.na.2009.05.026
|
| [36] |
Induced shear actuation of helicopter rotor blade for active twist control. Thin-Walled Structures (2007) 45: 111-121.
|
| [37] |
Large rotation analysis of elastic thin-walled beam-type structures using ESA approach. Computers and Structures (2003) 81: 1851-1864.
|
| [38] |
On an extensible beam equation with nonlinear damping and source terms. Journal of Differential Equations (2013) 254: 3903-3927.
|
| [39] |
Nonlinear vibrations of blade with varying rotating speed. Nonlinear Dynamics (2012) 68: 487-504.
|


Figures(3)
Lin Shen, Shu Wang, Yongxin Wang. The well-posedness and regularity of a rotating blades equation[J]. Electronic Research Archive, 2020, 28(2): 691-719. doi: 10.3934/era.2020036







 DownLoad:
DownLoad: