In this paper, we will study the emergent behavior of Kuramoto model with frustration on a general digraph containing a spanning tree. We provide a sufficient condition for the emergence of asymptotical synchronization if the initial data are confined in half circle. As lack of uniform coercivity in general digraph, we apply the node decomposition criteria in [
Citation: Tingting Zhu. Emergence of synchronization in Kuramoto model with frustration under general network topology[J]. Networks and Heterogeneous Media, 2022, 17(2): 255-291. doi: 10.3934/nhm.2022005
In this paper, we will study the emergent behavior of Kuramoto model with frustration on a general digraph containing a spanning tree. We provide a sufficient condition for the emergence of asymptotical synchronization if the initial data are confined in half circle. As lack of uniform coercivity in general digraph, we apply the node decomposition criteria in [

| [1] |
A shocking display of synchrony. Phys. D (2000) 143: 21-55. 
|
| [2] | Biology of synchronous flashing of fireflies. Nature (1996) 211: 562-564. |
| [3] |
Asymptotic formation and orbital stability of phase-locked states for the Kuramoto model. Phys. D (2012) 241: 735-754.
|
| [4] |
Synchronization of nonuniform Kuramoto oscillators for power grids with general connectivity and dampings. Nonlinearity (2019) 32: 559-583.
|
| [5] |
On exponential synchronization of Kuramoto oscillators. IEEE Trans. Automat. Control (2009) 54: 353-357.
|
| [6] | Quasientrainment and slow relaxation in a population of oscillators with random and frustrated interactions. Phys. Rev. Lett. (1992) 68: 1073-1076. |
| [7] |
Large-scale dynamics of the persistent turning walker model of fish behavior. J. Stat. Phys. (2008) 131: 989-1021.
|
| [8] |
Interplay of time-delay and velocity alignment in the Cucker-Smale model on a general digraph. Discrete Contin. Dyn. Syst.-Ser. B (2019) 24: 5569-5596.
|
| [9] |
Emergent Behavior of the Kuramoto model with a time-delay on a general digraph. SIAM J. Appl. Dyn. Syst. (2020) 19: 304-328.
|
| [10] |
Synchronization analysis of Kuramoto oscillators. Commun. Math. Sci. (2013) 11: 465-480.
|
| [11] |
On the critical coupling for Kuramoto oscillators. SIAM J. Appl. Dyn. Syst. (2011) 10: 1070-1099.
|
| [12] |
Synchronization and transient stability in power networks and nonuniform Kuramoto oscillators. SIAM J. Control Optim. (2012) 50: 1616-1642.
|
| [13] |
Synchronization in complex oscillator networks and smart grids. Proc. Natl. Acad. Sci. (2013) 110: 2005-2010.
|
| [14] |
On the complete synchronization of the Kuramoto phase model. Phys. D (2010) 239: 1692-1700.
|
| [15] |
S.-Y. Ha, D. Kim, J. Kim and X. Zhang, Asymptotic behavior of discrete Kuramoto model and uniform-in-time transition from discrete to continuous dynamics, J. Math. Phys., 60 (2019), 051508, 21 pp. |
| [16] |
S.-Y. Ha, D. Kim, J. Lee and S. E. Noh, Synchronization conditions of a mixed Kuramoto ensemble in attractive and repulsive couplings, J. Nonlinear Sci., 31 (2021), Paper No. 39, 34 pp. |
| [17] |
Remarks on the complete synchronization of Kuramoto oscillators. Nonlinearity (2015) 28: 1441-1462.
|
| [18] |
Remarks on the complete synchronization for the Kuramoto model with frustrations. Anal. Appl. (2018) 16: 525-563.
|
| [19] |
Emergence of phase-locked states for the Kuramoto model in a large coupling regime. Commun. Math. Sci. (2016) 14: 1073-1091.
|
| [20] |
Asymptotic synchronous behavior of Kuramoto type models with frustrations. Netw. Heterog. Media (2014) 9: 33-64.
|
| [21] |
Large-time dynamics of Kuramoto oscillators under the effects of inertia and frustration. SIAM J. Appl. Dyn. Syst. (2014) 13: 466-492.
|
| [22] |
Emergence of phase-locking in the Kuramoto model for identical oscillators with frustration. SIAM J. Appl. Dyn. Syst. (2018) 17: 581-625.
|
| [23] |
Complete synchronization of Kuramoto oscillators with hierarchical leadership. Commun. Math. Sci. (2014) 12: 485-508.
|
| [24] |
Formation of phase-locked states in a population of locally interacting Kuramoto oscillators. J. Differ. Equ. (2013) 255: 3053-3070.
|
| [25] |
On the critical exponent of the one-dimensional Cucker Smale model on a general graph. Math. Models Meth. Appl. Sci. (2020) 30: 1653-1703.
|
| [26] |
Asymptotic phase-Locking dynamics and critical coupling strength for the Kuramoto model. Commun. Math. Phys. (2020) 377: 811-857.
|
| [27] |
Y. Kuramoto, Self-entrainment of a population of coupled non-linear oscillators, In International Symposium on Mathematical Problems in Theoretical Physics, (ed. H. Araki), Springer Berlin Heidelberg, (1975), 420–411. |
| [28] |
Y. Kuramoto, Chemical Oscillations, Waves and Turbulence, Springer-Verlag, Berlin, 1984. |
| [29] |
Collective motion, sensor networks, and ocean sampling. Proc. IEEE (2007) 95: 48-74.
|
| [30] | Emergent multistability and frustration in phase-repulsive networks of oscillators. Phys. Rev. E (2011) 84: 016231. |
| [31] |
Uniqueness and well-ordering of emergent phase-locked states for the Kuramoto model with frustration and inertia. Math. Models Methods Appl. Sci. (2016) 26: 357-382.
|
| [32] |
The spectrum of the partially locked state for the Kuramoto model. J. Nonlinear Sci. (2007) 17: 309-347.
|
| [33] |
Modular synchronization in complex networks with a gauge Kuramoto model. EPL (2008) 83: 68003.
|
| [34] | Oscillator models and collective motion: Spatial patterns in the dynamics of engineered and biological networks. IEEE Control Sys. (2007) 27: 89-105. |
| [35] |
Glass synchronization in the network of oscillators with random phase shift. Phys. Rev. E (1998) 57: 5030-5035.
|
| [36] |
Extension of the Cucker-Smale control law to space flight formations. J. Guid. Control Dynam. (2009) 32: 527-537.
|
| [37] |
(2001) Synchronization: A Universal Concept in Nonlinear Sciences. Cambridge University Press.
|
| [38] |
A soluble active rotator model showing phase transitions via mutual entrainment. Prog. Theor. Phys. (1986) 76: 576-581.
|
| [39] |
From Kuramoto to Crawford: Exploring the onset of synchronization in populations of coupled oscillators. Phys. D (2000) 143: 1-20.
|
| [40] |
Coupled oscillators and biological synchronization. Sci. Amer. (1993) 269: 101-109.
|
| [41] | Dynamics in co-evolving networks of active elements. Forma (2009) 24: 17-22. |
| [42] |
Flocks, herds, and schools: A quantitative theory of flocking. Phys. Rev. E (1998) 58: 4828-4858.
|
| [43] |
Biological rhythms and behavior of populations of coupled oscillators. J. Theor. Biol. (1967) 16: 15-42.
|
| [44] | Frustration effect on synchronization and chaos in coupled oscillators. Chin. Phys. Soc. (2011) 10: 703-707. |
| [45] |
X. Zhang and T. Zhu, Emergence of synchronization in Kuramoto model with general digraph, preprint, arXiv: 2107.06487. |




Figures(5)
Tingting Zhu. Emergence of synchronization in Kuramoto model with frustration under general network topology[J]. Networks and Heterogeneous Media, 2022, 17(2): 255-291. doi: 10.3934/nhm.2022005

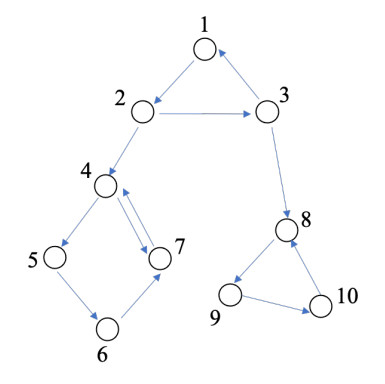
The interaction network
Frequency synchronization with
Asymptotic behavior for
Asymptotic behavior for
The four cases






 DownLoad:
DownLoad: