We study the extension of the macroscopic crowd motion model with congestion to a population divided into two types. As the set of pairs of density whose sum is bounded is not geodesically convex in the product of Wasserstein spaces, the generic splitting scheme may be ill-posed. We thus analyze precisely the projection operator on the set of admissible densities, and link it to the projection on the set of measures of bounded density in the mono-type case. We then derive a numerical scheme to adapt the one-typed population splitting scheme.
Citation: Félicien BOURDIN. Splitting scheme for a macroscopic crowd motion model with congestion for a two-typed population[J]. Networks and Heterogeneous Media, 2022, 17(5): 783-801. doi: 10.3934/nhm.2022026
We study the extension of the macroscopic crowd motion model with congestion to a population divided into two types. As the set of pairs of density whose sum is bounded is not geodesically convex in the product of Wasserstein spaces, the generic splitting scheme may be ill-posed. We thus analyze precisely the projection operator on the set of admissible densities, and link it to the projection on the set of measures of bounded density in the mono-type case. We then derive a numerical scheme to adapt the one-typed population splitting scheme.

| [1] |
L. Ambrosio, N. Gigli and G. Savaré, Gradient Flows in Metricspaces and in the Space of Proba-bility Measures, Lectures in Mathematics ETH Zürich. Birkhäuser Verlag, Basel, 2005. |
| [2] |
T. M. Blackwell and P. Bentley, Don't push me! Collision-avoiding swarms, Proceedings of the 2002 Congress on Evolutionary Computation. CEC'02 (Cat. No. 02TH8600), IEEE, 2 (2002). |
| [3] |
Cellular automata microsimulation for modeling bi-directional pedestrian walkways. Transportation Research Part B: Methodological (2001) 35: 293-312. 
|
| [4] |
C. E. Brennen, Fundamentals of Multiphase flow, 2005. |
| [5] |
C. Burstedde, et al., Simulation of pedestrian dynamics using a two-dimensional cellular automaton, Physica A: Statistical Mechanics and its Applications, 295 (2001), 507–525. |
| [6] |
Incompressible immiscible multiphase flows in porous media: A variational approach. Anal. PDE (2017) 10: 1845-1876.
|
| [7] |
Convergence of entropic schemes for optimal transport and gradient flows. SIAM J. Math. Anal. (2017) 49: 1385-1418.
|
| [8] |
Finite speed of propagation in porous media by mass transportation methods. C. R. Math. (2004) 338: 815-818.
|
| [9] |
(2005) Multiphase Flow Handbook. CRC press.
|
| [10] | Sinkhorn distances: Lightspeed computation of optimal transport. Advances in Neural Information Processing Systems (2013) 26: 2292-2300. |
| [11] | Social force model for pedestrian dynamics. Physical review E (1995) 51: 4282. |
| [12] |
The variational formulation of the Fokker–Planck equation. SIAM J. Math. Anal. (1998) 29: 1-17.
|
| [13] |
On nonlinear cross-diffusion systems: An optimal transport approach. Calc. Var. Partial Differential Equations (2018) 57: 1-40.
|
| [14] |
A macroscopic crowd motion model of gradient flow type. Math. Models Methods Appl. Sci. (2010) 20: 1787-1821.
|
| [15] |
Handling congestion in crowd motion modeling. Netw. Heterog. Media (2011) 6: 485-519.
|
| [16] |
A non-local model for a swarm. J. Math. Biol. (1999) 38: 534-570.
|
| [17] |
An interacting particle system modelling aggregation behavior: From individuals to populations. J. Math. Biol. (2005) 50: 49-66.
|
| [18] |
Evolution problem associated with a moving convex set in a Hilbert space. J. Differential Equations (1977) 26: 347-374.
|
| [19] |
The geometry of dissipative evolution equations: The porous medium equation. Comm. Partial Differential Equations (2001) 26: 101-174.
|
| [20] |
Entropic approximation of Wasserstein gradient flows. SIAM J. Imaging Sci. (2015) 8: 2323-2351.
|
| [21] |
A. Roudneff-Chupin, Modélisation macroscopique de mouvements de foule, Phdthesis, PhD Thesis, Université Paris-Sud XI, 2011. |
| [22] |
F. Santambrogio, Optimal Transport for Applied Mathematicians, Birkhäuser/Springer, Cham, 2015. |
| [23] | Focusing in collision problems in solids. J. Appl. Physics (1957) 28: 1246-1250. |
| [24] | Macroscopic dynamics of multilane traffic. Physical Review E (1999) 29: 6328. |







Figures(8)
Félicien BOURDIN. Splitting scheme for a macroscopic crowd motion model with congestion for a two-typed population[J]. Networks and Heterogeneous Media, 2022, 17(5): 783-801. doi: 10.3934/nhm.2022026

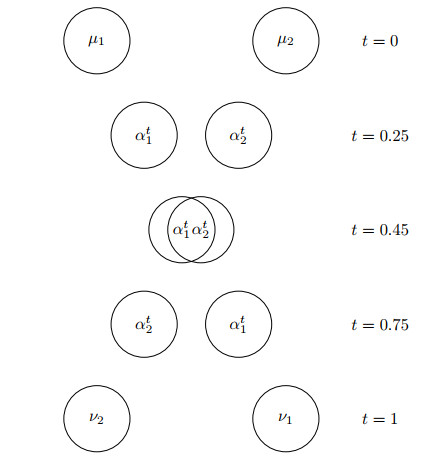
The interpolation between two opposite configurations of spheres along generalized geodesics. In particular, for
The cell of the mesh in position
The distribution of the image of the cell
Distribution of the 2-Wasserstein distances between pairs of estimated projections of the density in example 3
The motion of two crossing discs. The first column represents the sum of the two densities, and the other two the separated densities. The total time of the simulation is
The motion of two crossing discs in the presence of chemoattraction. We chose the same parameters that in the previous simulation, with
Aggregation of a composite crowd driven by chemoattraction and short-range interactions. For
In solid line, the function






 DownLoad:
DownLoad: