In this paper, we establish an integrated pest management Filippov model with group defense of pests and a constant rate release of natural enemies. First, the dynamics of the subsystems in the Filippov system are analyzed. Second, the dynamics of the sliding mode system and the types of equilibria of the Filippov system are discussed. Then the complex dynamics of the Filippov system are investigated by using numerical analysis when there is a globally asymptotically stable limit cycle and a globally asymptotically stable equilibrium in two subsystems, respectively. Furthermore, we analyze the existence region of a sliding mode and pseudo equilibrium, as well as the complex dynamics of the Filippov system, such as boundary equilibrium bifurcation, the grazing bifurcation, the buckling bifurcation and the crossing bifurcation. These complex sliding bifurcations reveal that the selection of key parameters can control the population density no more than the economic threshold, so as to prevent the outbreak of pests.
Citation: Baolin Kang, Xiang Hou, Bing Liu. Threshold control strategy for a Filippov model with group defense of pests and a constant-rate release of natural enemies[J]. Mathematical Biosciences and Engineering, 2023, 20(7): 12076-12092. doi: 10.3934/mbe.2023537
In this paper, we establish an integrated pest management Filippov model with group defense of pests and a constant rate release of natural enemies. First, the dynamics of the subsystems in the Filippov system are analyzed. Second, the dynamics of the sliding mode system and the types of equilibria of the Filippov system are discussed. Then the complex dynamics of the Filippov system are investigated by using numerical analysis when there is a globally asymptotically stable limit cycle and a globally asymptotically stable equilibrium in two subsystems, respectively. Furthermore, we analyze the existence region of a sliding mode and pseudo equilibrium, as well as the complex dynamics of the Filippov system, such as boundary equilibrium bifurcation, the grazing bifurcation, the buckling bifurcation and the crossing bifurcation. These complex sliding bifurcations reveal that the selection of key parameters can control the population density no more than the economic threshold, so as to prevent the outbreak of pests.

| [1] |
W. Peng, N. L. Ma, D. Zhang, Q. Zhou, X. Yue, S. C. Khoo, et al., A review of historical and recent locust outbreaks: Links to global warming, food security and mitigation strategies, Environ. Res., 191 (2020), 110046. https://doi.org/10.1016/j.envres.2020.110046 doi: 10.1016/j.envres.2020.110046

|
| [2] |
X. Gao, G. Li, X. Wang, S. Wang, F. Li, Y. Wang, et al., The locust plagues of the Ming and Qing dynasties in the Xiang-E-Gan region, China, Nat. Hazards, 107 (2021), 1149–1165. https://doi.org/10.1007/s11069-021-04622-y doi: 10.1007/s11069-021-04622-y
|
| [3] |
H. I. Freedman, G. S. Wolkowicz, Predator-prey systems with group defence: the paradox of enrichment revisited, Bull. Math. Biol., 48 (1986), 493–508. https://doi.org/10.1007/BF02462320 doi: 10.1007/BF02462320
|
| [4] |
H. I. Freedman, S. Ruan, Hopf bifurcation in three-species food chain models with group defense, Math. Biosci., 111 (1992), 73–87. https://doi.org/10.1016/0025-5564(92)90079-C doi: 10.1016/0025-5564(92)90079-C
|
| [5] | J. C. Holmes, W. M. Bethel, Modification of intermediate host behaviour by parasites, Zool. J. Linn. Soc., 51 (1972), 123–149. |
| [6] |
A. A. Salih, M. Baraibar, K. K. Mwangi, G. Artan, Climate change and locust outbreak in East Africa, Nat. Clim. Change, 10 (2020), 584–585. https://doi.org/10.1038/s41558-020-0835-8 doi: 10.1038/s41558-020-0835-8
|
| [7] |
C. N. Meynard, M. Lecoq, M. P. Chapuis, C. Piou, On the relative role of climate change and management in the current desert locust outbreak in East Africa, Global. Change. Biol., 26 (2020), 3753–3755. https://doi.org/10.1111/gcb.15137 doi: 10.1111/gcb.15137
|
| [8] | M. L. Flint, Integrated Pest Management for Walnuts, 2nd edition, University of California, Oakland, 1987. |
| [9] |
J. C. V. Lenteren, J. Woets, Biological and integrated pest control in greenhouses, Ann. Rev. Entomol, 33 (1988), 239–250. https://doi.org/10.1146/annurev.en.33.010188.001323 doi: 10.1146/annurev.en.33.010188.001323
|
| [10] |
S. Y. Tang, Y. Tian, R. A. Cheke, Dynamic complexity of a predator-prey model for IPM with nonlinear impulsive control incorporating a regulatory factor for predator releases, Math. Model. Anal., 24 (2019), 134–154. https://doi.org/10.3846/mma.2019.010 doi: 10.3846/mma.2019.010
|
| [11] |
T. T. Yu, Y. Tian, H. J. Guo, X. Song, Dynamical analysis of an integrated pest management predator Cprey model with weak Allee effect, J. Biol. Dyn., 13 (2019), 218–244. https://doi.org/10.1080/17513758.2019.1589000 doi: 10.1080/17513758.2019.1589000
|
| [12] |
B. P. Baker, T. A. Green, A. J. Loker, Biological control and integrated pest management in organic and conventional systems, Biol. Control, 140 (2020), 104095. https://doi.org/10.1016/j.biocontrol.2019.104095 doi: 10.1016/j.biocontrol.2019.104095
|
| [13] | J. C. Headley, Defining the Economic Threshold, in Pest Control Strategies for the Future, National Academy of Sciences, (1972), 100–108. |
| [14] | L. G. Higley, D. J. Boethel, Handbook of Soybean Insect Pests, Entomological Society of America, 1994. |
| [15] |
L. P. Pedigo, S. H. Hutchins, L. G. Higley, Economic injury levels in theory and practice, Ann. Rev. Entomol., 31 (1986), 341–368. https://doi.org/10.1146/annurev.en.31.010186.002013 doi: 10.1146/annurev.en.31.010186.002013
|
| [16] |
Y. Tian, K. Sun, L. S. Chen, Geometric approach to the stability analysis of the periodic solution in a semi-continuous dynamic system, Int. J. Biomath., 7 (2014), 1450018. https://doi.org/10.1142/S1793524514500181 doi: 10.1142/S1793524514500181
|
| [17] | S. Y. Tang, W. H. Pang, R. A. Cheke, J. Wu, Global dynamics of a state-dependent feedback control system, Adv. Differ. Equ-Ny, 1 (2015). |
| [18] |
B. Liu, Y. Tian, B. L. Kang, Dynamics on a Holling II predator Cprey model with state-dependent impulsive control, Int. J. Biomath., 5 (2012), 1260006. https://doi.org/10.1142/S1793524512600066 doi: 10.1142/S1793524512600066
|
| [19] |
Y. Tian, S. Y. Tang, Dynamics of a density-dependent predator-prey biological system with nonlinear impulsive control, Math. Biosci. Eng., 18 (2021), 7318–7343. https://doi.org/10.3934/mbe.2021362 doi: 10.3934/mbe.2021362
|
| [20] |
I. Ullah Khan, S. Ullah, E. Bonyah, B. A. Alwan, A. Alshehri, A state-dependent impulsive nonlinear system with ratio-dependent action threshold for investigating the pest-natural enemy model, Complexity, 2022 (2022), 7903450. https://doi.org/10.1155/2022/7903450 doi: 10.1155/2022/7903450
|
| [21] | V. I. Utkin, Sliding Modes and Their Applications in Variable Structure Systems, Mir Publishers, Moscow, 1994. |
| [22] | A. F. Filippov, Differential Equations with Discontinuous Righthand Sides, Kluwer Academic Publishers, Dordrecht, 1988. |
| [23] | V. I. Utkin, Sliding Modes in Control and Optimization, Springer-Verlag, Berlin, 1992. |
| [24] |
Y. A. Kuznetsov, S. Rinaldi, A. Gragnani, One parameter bifurcations in planar Filippov systems, Int. J. Bifurc. Chaos, 13 (2003), 2157–2188. https://doi.org/10.1142/S0218127403007874 doi: 10.1142/S0218127403007874
|
| [25] |
W. J. Qin, S. Y. Tang, C. C. Xiang, Y. Yang, Effects of limited medical resource on a Filippov infectious disease model induced by selection pressure, Appl. Math. Comput., 283 (2016), 339–354. https://doi.org/10.1016/j.amc.2016.02.042 doi: 10.1016/j.amc.2016.02.042
|
| [26] | D. Y. Wu, H. Y. Zhao, Y. Yuan, Complex dynamics of a diffusive predator-prey model with strong Allee effect and threshold harvesting, J. Math. Anal. Appl., 469 (2019), 982–1014. |
| [27] |
Y. N. Xiao, X. X. Xu, S. Y. Tang, Sliding mode control of outbreaks of emerging infectious diseases, Bull. Math. Biol., 74 (2012), 2403–2422. https://doi.org/10.1007/s11538-012-9758-5 doi: 10.1007/s11538-012-9758-5
|
| [28] |
W. J. Qin, X. W. Tan, X. T. Shi, J. Chen, X. Liu, Dynamics and bifurcation analysis of a Filippov predator-prey ecosystem in a seasonally fluctuating environment, Int. J. Bifurc. Chaos, 29 (2019), 1950020. https://doi.org/10.1142/S0218127419500202 doi: 10.1142/S0218127419500202
|
| [29] |
J. Bhattacharyya, P. T. Piiroinen, S. Banerjee, Dynamics of a Filippov predator-prey system with stage-specific intermittent harvesting, Nonlinear Dyn., 105 (2021), 1019–1043. https://doi.org/10.1007/s11071-021-06549-2 doi: 10.1007/s11071-021-06549-2
|
| [30] |
K. Enberg, Benefits of threshold strategies and age-selective harvesting in a fluctuating fish stock of Norwegian spring spawning herring Clupea harengus, Mar. Ecol. Prog. Ser., 298 (2005), 277–286. https://doi.org/10.3354/meps298277 doi: 10.3354/meps298277
|
| [31] | V. I. Utkin, J. Guldner, J. X. Shi, Sliding Model Control in Electromechanical Systems, Taylor Francis Group, London, 2009. |
| [32] |
C. Dong, C. Xiang, W. Qin, Y. Yang, Global dynamics for a Filippov system with media effects, Math. Biosci. Eng., 19 (2022), 2835–2852. https://doi.org/10.3934/mbe.2022130 doi: 10.3934/mbe.2022130
|
| [33] |
C. Erazo, M. E. Homer, P. T. Piiroinen, M. Bernardo, Dynamic cell mapping algorithm for computing basins of attraction in planar Filippov systems, Int. J. Bifurc. Chaos, 27 (2017), 1730041. https://doi.org/10.1142/S0218127417300415 doi: 10.1142/S0218127417300415
|
| [34] | J. Deng, S. Tang, H. Shu, Joint impacts of media, vaccination and treatment on an epidemic Filippov model with application to COVID-19, J. Theor. Biol., 523 (2021), 110698. |
| [35] | D. M. Xiao, S. R. Ruan, Codimension two bifurcations in a predator Cprey system with group defense, Int. J. Bifurc. Chaos, 11 (2001), 2123–2131. |
| [36] |
X. Hou, B. Liu, Y. Wang, Z. Zhao, Complex dynamics in a Filippov pest control model with group defense, Int. J. Biomath., 15 (2022), 2250053. https://doi.org/10.1142/S179352452250053X doi: 10.1142/S179352452250053X
|
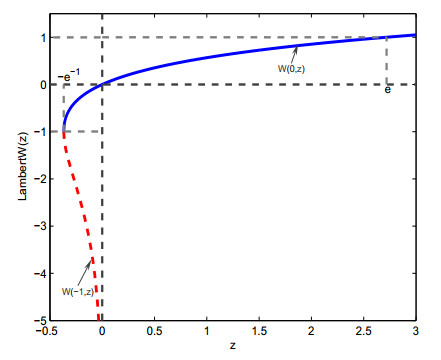
| [37] | R. M. Corless, G. H. Gonnet, D. E. G. Hare, D. J. Jeffrey, D. E. Knuth, On the LambertW function, Adv. Comput. Math., 5 (1996), 329–359. |








Figures(9)

Baolin Kang, Xiang Hou, Bing Liu. Threshold control strategy for a Filippov model with group defense of pests and a constant-rate release of natural enemies[J]. Mathematical Biosciences and Engineering, 2023, 20(7): 12076-12092. doi: 10.3934/mbe.2023537







 DownLoad:
DownLoad: