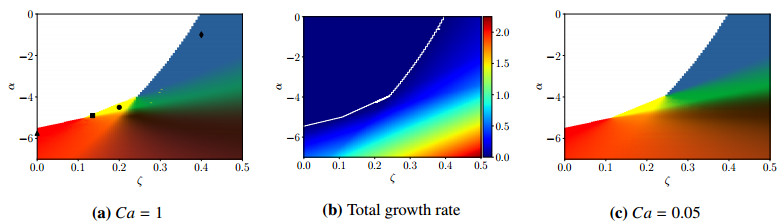
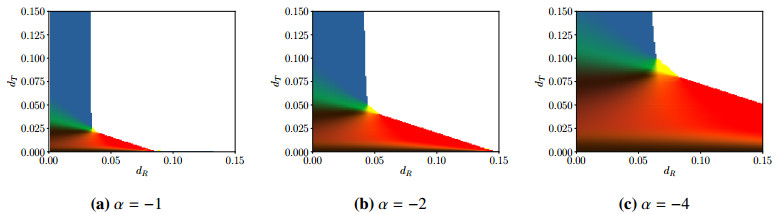
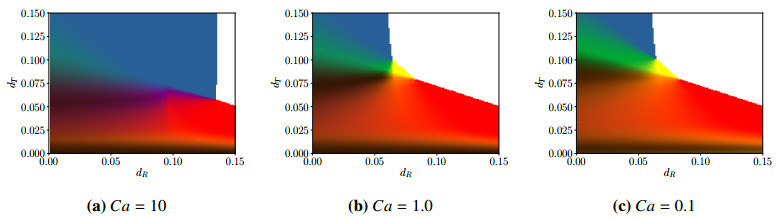
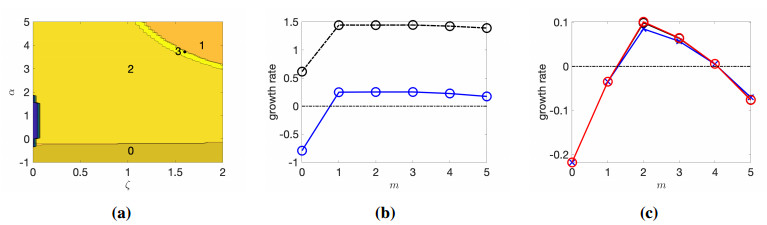
Active fluids consume fuel at the microscopic scale, converting this energy into forces that can drive macroscopic motions over scales far larger than their microscopic constituents. In some cases, the mechanisms that give rise to this phenomenon have been well characterized, and can explain experimentally observed behaviors in both bulk fluids and those confined in simple stationary geometries. More recently, active fluids have been encapsulated in viscous drops or elastic shells so as to interact with an outer environment or a deformable boundary. Such systems are not as well understood. In this work, we examine the behavior of droplets of an active nematic fluid. We study their linear stability about the isotropic equilibrium over a wide range of parameters, identifying regions in which different modes of instability dominate. Simulations of their full dynamics are used to identify their nonlinear behavior within each region. When a single mode dominates, the droplets behave simply: as rotors, swimmers, or extensors. When parameters are tuned so that multiple modes have nearly the same growth rate, a pantheon of modes appears, including zigzaggers, washing machines, wanderers, and pulsators.
Citation: Y. -N. Young, Michael J. Shelley, David B. Stein. The many behaviors of deformable active droplets[J]. Mathematical Biosciences and Engineering, 2021, 18(3): 2849-2881. doi: 10.3934/mbe.2021145
Active fluids consume fuel at the microscopic scale, converting this energy into forces that can drive macroscopic motions over scales far larger than their microscopic constituents. In some cases, the mechanisms that give rise to this phenomenon have been well characterized, and can explain experimentally observed behaviors in both bulk fluids and those confined in simple stationary geometries. More recently, active fluids have been encapsulated in viscous drops or elastic shells so as to interact with an outer environment or a deformable boundary. Such systems are not as well understood. In this work, we examine the behavior of droplets of an active nematic fluid. We study their linear stability about the isotropic equilibrium over a wide range of parameters, identifying regions in which different modes of instability dominate. Simulations of their full dynamics are used to identify their nonlinear behavior within each region. When a single mode dominates, the droplets behave simply: as rotors, swimmers, or extensors. When parameters are tuned so that multiple modes have nearly the same growth rate, a pantheon of modes appears, including zigzaggers, washing machines, wanderers, and pulsators.

| [1] |
M. C. Marchetti, J. F. Joanny, S. Ramaswamy, T. B. Liverpool, J. Prost, M. Rao, et al., Hydrodynamics of soft active matter, Rev. Mod. Phys., 85 (2013), 1143. doi: 10.1103/RevModPhys.85.1143

|
| [2] | D. Saintillan, M. J. Shelley, Theory of active suspensions, in Complex Fluids in biological systems, Springer, 2015,319–355. |
| [3] | D. Needleman, Z. Dogic, Active matter at the interface between materials science and cell biology, Nat. Rev. Mater., 2 (2017), 1–14. |
| [4] | S. Shankar, A. Souslov, M. J. Bowick, M. C. Marchetti, V. Vitelli, Topological active matter, preprint, arXiv: 2010.00364. |
| [5] |
E. Lushi, H. Wioland, R. E. Goldstein, Fluid flows created by swimming bacteria drive self-organization in confined suspensions, Proc. Natl. Acad. Sci. USA, 111 (2014), 9733–9738. doi: 10.1073/pnas.1405698111
|
| [6] |
M. Theillard, R. Alonso-Matilla, D. Saintillan, Geometric control of active collective motion, Soft Matter, 13 (2017), 363–375. doi: 10.1039/C6SM01955B
|
| [7] |
A. Lefauve, D. Saintillan, Globally aligned states and hydrodynamic traffic jams in confined suspensions of active asymmetric particles, Phys. Rev. E, 89 (2014), 021002. doi: 10.1103/PhysRevE.89.021002
|
| [8] |
H. Wioland, F. G. Woodhouse, J. Dunkel, J. O. Kessler, R. E. Goldstein, Confinement stabilizes a bacterial suspension into a spiral vortex, Phys. Rev. Lett., 110 (2013), 268102. doi: 10.1103/PhysRevLett.110.268102
|
| [9] | K. T. Wu, J. B. Hishamunda, D. T. Chen, S. J. Decamp, Y. W. Chang, A. Fernández-Nieves, et al., Transition from turbulent to coherent flows in confined three-dimensional active fluids, Science, 2017. |
| [10] |
A. Opathalage, M. M. Norton, M. P. Juniper, B. Langeslay, S. A. Aghvami, S. Fraden, et al., Self-organized dynamics and the transition to turbulence of confined active nematics, Proc. Natl. Acad. Sci. USA, 116 (2019), 4788–4797. doi: 10.1073/pnas.1816733116
|
| [11] |
C. W. Wolgemuth, J. Stajic, A. Mogilner, Redundant mechanisms for stable cell locomotion revealed by minimal models, Biophys. J., 101 (2011), 545–553. doi: 10.1016/j.bpj.2011.06.032
|
| [12] |
Y. Bashirzadeh, A. P. Liu, Encapsulation of the cytoskeleton: towards mimicking the mechanics of a cell, Soft Matter, 15 (2019), 8425. doi: 10.1039/C9SM01669D
|
| [13] |
K. Keren, Z. Pincus, G. M. Allen, E. L. Barnhart, G. Marriott, A. Mogilner, et al., Mechanism of shape determination in motile cells, Nature, 453 (2008), 475–481. doi: 10.1038/nature06952
|
| [14] |
E. Tjhung, A. Tiribocchi, D. Marenduzzo, M. E. Cates, A minimal physical model captures the shapes of crawling cells, Nat. Commun., 6 (2015), 5420. doi: 10.1038/ncomms6420
|
| [15] |
M. L. Blow, M. Aqil, B. Liebchen, D. Marenduzzo, Motility of active nematic films driven by "active anchoring", Soft Matter, 13 (2017), 6137–6144. doi: 10.1039/C7SM00325K
|
| [16] |
G. Kitavtsev, A. Munch, B. Wagner, Thin-film models for an active gel, Proc. Roy. Soc. A, 474 (2018), 20170828. doi: 10.1098/rspa.2017.0828
|
| [17] |
S. Trinschek, F. Stegemerten, K. John, U. Thiele, Thin-film modeling of resting and moving active droplets, Phys. Rev. E, 101 (2020), 062802. doi: 10.1103/PhysRevE.101.062802
|
| [18] | M. L. Blow, S. P. Thampi, J. M. Yeomans, Biphasic, lyotropic, active nematics, Phys. Rev. Lett., 113 (2014), 248303. |
| [19] |
E. Tjhung, M. E. Cates, D. Marenduzzo, Spontaneous symmetry breaking in active droplets provides a generic route to motility, Proc. Natl. Acad. Sci. USA, 109 (2012), 12381–12386. doi: 10.1073/pnas.1200843109
|
| [20] |
T. Gao, Z. Li, Self-driven droplet powered by active nematics, Phys. Rev. Lett., 119 (2017), 108002. doi: 10.1103/PhysRevLett.119.108002
|
| [21] |
C. A. Whitfield, R. J. Hawkins, Instabilities, motion and deformation of active fluid droplets, New J. Phys., 18 (2016), 123016. doi: 10.1088/1367-2630/18/12/123016
|
| [22] |
H. Soni, W. Luo, R. A. Pelcovits, T. R. Powers, Stability of the interface of an isotropic active fluid, Soft Matter, 15 (2019), 6318–6330. doi: 10.1039/C9SM01216H
|
| [23] |
T. J. Pedley, Spherical squirmers: models for swimming micro-organisms, IMA J. Appl. Math., 81 (2016), 488–521. doi: 10.1093/imamat/hxw030
|
| [24] |
O. S. Pak, E. Lauga, Generalized squirming motion of a sphere, J. Eng. Math., 88 (2014), 1–28. doi: 10.1007/s10665-014-9690-9
|
| [25] | C. C. Maass, C. Kruger, S. Herminghaus, C. Bahr, Swimming droplets, Annu. Rev. Condens. Matter Phys., 7 (2016), 61–623. |
| [26] |
M. S. D. Wykes, J. Palacci, T. Adachi, L. Ristroph, X. Zhong, M. D. Ward, et al., Dynamic self-assembly of microscale rotors and swimmers, Soft Matter, 12 (2016), 4584–4589. doi: 10.1039/C5SM03127C
|
| [27] |
T. Sanchez, D. T. Chen, S. J. DeCamp, M. Heymann, Z. Dogic, Spontaneous motion in hierarchically assembled active matter, Nature, 491 (2012), 431–434. doi: 10.1038/nature11591
|
| [28] |
S. J. Decamp, G. S. Redner, A. Baskaran, M. F. Hagan, Z. Dogic, Orientational order of motile defects in active nematics, Nat. Mater., 14 (2015), 1110–1115. doi: 10.1038/nmat4387
|
| [29] |
G. Henkin, S. J. Decamp, D. T. N. Chen, T. Sanchez, Z. Dogic, Tunable dynamics of microtubule-based active isotropic gels, Phil. Trans. Royal Soc. A., 372 (2014), 20140142. doi: 10.1098/rsta.2014.0142
|
| [30] |
T. D. Ross, H. J. Lee, Z. Qu, R. A. Banks, R. Phillips, M. Thomson, Controlling organization and forces in active matter through optically defined boundaries, Nature, 572 (2019), 224–229. doi: 10.1038/s41586-019-1447-1
|
| [31] |
D. Saintillan, M. J. Shelley, Instabilities and pattern formation in active particle suspensions: Kinetic theory and continuum simulations, Phys. Rev. Lett., 100 (2008), 178103. doi: 10.1103/PhysRevLett.100.178103
|
| [32] |
T. Gao, M. D. Betterton, M. J. Shelley, Analytical structure, dynamics, and coarse graining of a kinetic model of an active fluid, Phys. Rev. Fluids, 2 (2017), 093302. doi: 10.1103/PhysRevFluids.2.093302
|
| [33] |
W. Maier, A. Saupe, Eine einfache molekulare theorie des nematischen kristallinflüssigen zustandes, Z. Naturforsch., A: Phys. Sci., 13 (1958), 564–566. doi: 10.1515/zna-1958-0716
|
| [34] |
C. J. Miles, A. A. Evans, M. J. Shelley, S. E. Spagnolie, Active matter invasion of a viscous fluid: Unstable sheets and a no-flow theorem, Phys. Rev. Lett., 122 (2019), 098002. doi: 10.1103/PhysRevLett.122.098002
|
| [35] | C. Bingham, An antipodally symmetric distribution on the sphere, Ann. Stat., 2 (1974), 1201–1225. |
| [36] |
C. V. Chabul, L. G. Leal, A closure approximation for liquid-crystalline polymer models based on parametric density estimation, J. Rheol., 42 (1998), 177–201. doi: 10.1122/1.550887
|
| [37] | R. Alonso-Matilla, D. Saintillan, Interfacial instabilities in active viscous films, J. Non-Newtonian Fluid Mech., 259 (2019), 57. |
| [38] |
C. J. Miles, A. E. Evans, M. J. Shelley, S. E. Spagnolie, Active matter invasion of a viscous fluid: Unstable sheets and a no-flow theorem, Phys. Rev. Lett., 122 (2019), 098002. doi: 10.1103/PhysRevLett.122.098002
|
| [39] | L. G. Leal, in Advanced Transport Phenomena, Cambridge University Press, 2012. |
| [40] | C. G. Canuto, M. Y. Hussani, A. M. Quateroni, T. A. Zang, in Spectral Methods in Fluid Dynamics, Springer, 1988. |
| [41] | L. N. Trefethen, in Spectral Methods in MATLAB, SIAM, 2000. |
| [42] |
H. C. Berg, D. A. Brown, Chemotaxis in escherichia coli analysed by three-dimensional tracking, Nature, 239 (1972), 500–504. doi: 10.1038/239007a0
|
| [43] |
M. Lighthill, On the squirming motion of nearly spherical deformable bodies through liquids at very small reynolds numbers, Commun. Pure Appl. Math., 5 (1952), 109–118. doi: 10.1002/cpa.3160050201
|
| [44] |
J. R. Blake, A spherical envelope approach to ciliary propulsion, J. Fluid Mech., 46 (1971), 199–208. doi: 10.1017/S002211207100048X
|





Figures(25) / Tables(2)

Y. -N. Young, Michael J. Shelley, David B. Stein. The many behaviors of deformable active droplets[J]. Mathematical Biosciences and Engineering, 2021, 18(3): 2849-2881. doi: 10.3934/mbe.2021145







 DownLoad:
DownLoad: