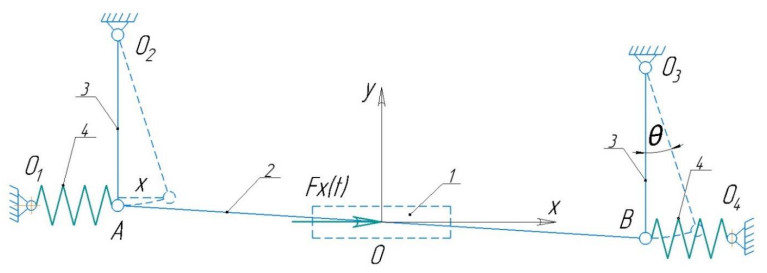
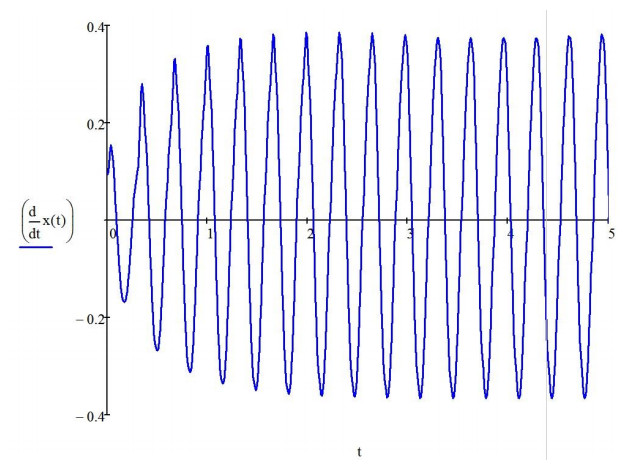
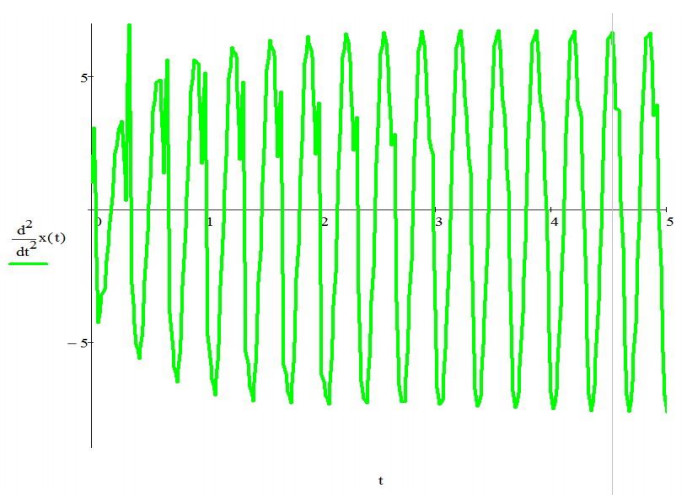
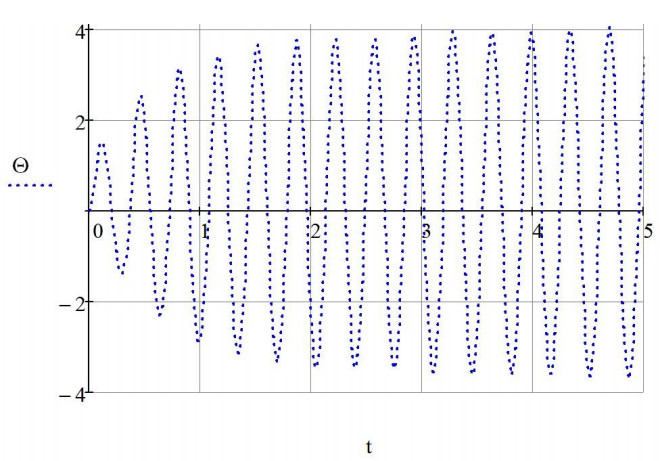
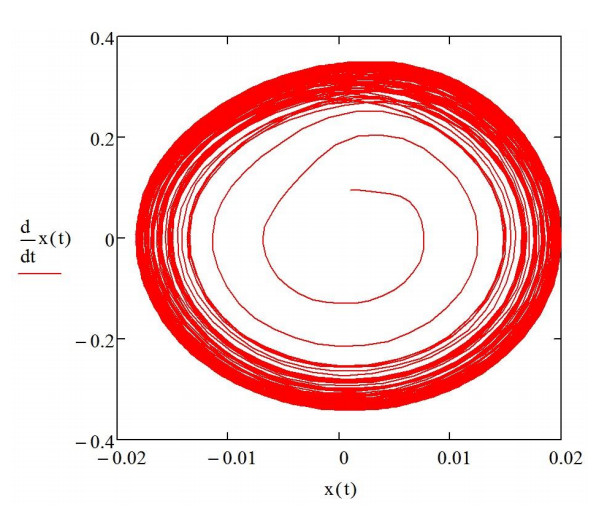
This article presents the results of a study of the sieve mill of a grain cleaning machine with a drive based on a linear asynchronous motor instead of a classic mechanical drive. The purpose of this work is to describe the structural and technological parameters of a sieve mill with a linear asynchronous drive to implement a mathematical model of the technological process of a grain cleaning machine work. A kinematic study of the flat hinged mechanism of the sieve mill of a grain cleaning machine was carried out, for which all geometric dimensions are known and the laws of motion of the leading link - the electric drive of the sieve mill based on a linear asynchronous motor are determined. As a result, the following were determined: kinematic modes kP > kB > kH of sieve mill vibrations under various technological conditions; laws of motion of all parts of the mechanism of the sieve mill, movement, speed (0.34... 0.36 m/s) and acceleration (5.8... 6.9 m/s2) of the driven links; a mathematical model of the kinematic scheme of a sieve mill of a grain cleaning machine with a drive from a linear induction motor has been developed. The use of a linear induction motor compared to existing (classical) drive designs as a drive of a sieve mill in a grain-cleaning machine significantly reduces the metal consumption of the structure (drive shafts, transmission mechanisms, connecting rods, bearings are excluded from the structure), and energy consumption is also reduced due to pulse drive operation; makes it possible in a wide range of technological parameters regulation for various crops, including various physical and mechanical parameters of the crop being cleaned.
Citation: Rustam Aipov, Andrey Linenko, Ildar Badretdinov, Marat Tuktarov, Salavat Akchurin. Research of the work of the sieve mill of a grain-cleaning machine with a linear asynchronous drive[J]. Mathematical Biosciences and Engineering, 2020, 17(4): 4348-4363. doi: 10.3934/mbe.2020240
This article presents the results of a study of the sieve mill of a grain cleaning machine with a drive based on a linear asynchronous motor instead of a classic mechanical drive. The purpose of this work is to describe the structural and technological parameters of a sieve mill with a linear asynchronous drive to implement a mathematical model of the technological process of a grain cleaning machine work. A kinematic study of the flat hinged mechanism of the sieve mill of a grain cleaning machine was carried out, for which all geometric dimensions are known and the laws of motion of the leading link - the electric drive of the sieve mill based on a linear asynchronous motor are determined. As a result, the following were determined: kinematic modes kP > kB > kH of sieve mill vibrations under various technological conditions; laws of motion of all parts of the mechanism of the sieve mill, movement, speed (0.34... 0.36 m/s) and acceleration (5.8... 6.9 m/s2) of the driven links; a mathematical model of the kinematic scheme of a sieve mill of a grain cleaning machine with a drive from a linear induction motor has been developed. The use of a linear induction motor compared to existing (classical) drive designs as a drive of a sieve mill in a grain-cleaning machine significantly reduces the metal consumption of the structure (drive shafts, transmission mechanisms, connecting rods, bearings are excluded from the structure), and energy consumption is also reduced due to pulse drive operation; makes it possible in a wide range of technological parameters regulation for various crops, including various physical and mechanical parameters of the crop being cleaned.

| [1] | S. G. Mudarisov, I. D. Badretdinov, Improving production lines for post-harvest grain processing in farms, in The collection: Achievements of Science - Agricultural Production Materials of the XLVII International Scientific and Technical Conference dedicated to the 100th anniversary of I.E. Ullman (2008), 28-33. |
| [2] | S. G. Mudarisov, Z. S. Rakhimov, I. D. Badretdinov, A. V. Akbatyrov, I. M. Farkhutdinov, Modernization of grain processing lines taking into account business conditions, in The collection: Scientific support for the stable functioning and development of the agro-industrial complex materials of the All-Russian scientific-practical conference with international participation (2009), 122-126. |
| [3] | R. W. De Doncker, Modern electrical drives: Design and future trends, in Conference Proceedings - IPEMC 2006: CES/IEEE 5th International Power Electronics and Motion Control Conference (2007), 31-38. |
| [4] | A. Dorokhov, V. Khamyev, K. Lepeshkin, Modernization of grinding machines of grain cleaning machines, in MATEC Web of Conferences, ICMTMTE, 224 (2018), 05009. |
| [5] | D. Steponavičius, L. Špokas, S. Petkevičius, The influence of position of the first straw walkerґs section on grain separation, Agron. Res. 6 (2008), 377-385. |
| [6] | L. Ma, X. Song, H. Wang, X. Xu, T. Han, H. Guo, Screening Kinematics Analysis of Cleaning Organs and Extractives, IOP Conf. Ser. Mater. Sci. Eng., 452 (2018), 042123. |
| [7] | I. P. Popov, V. G. Chumakov, A.D. Terentyev, Drive power reduction of sieve sorting machines, Scientific and Technical Statements of St. Petersburg State Polytechnic University, 2 (2015), 175-181. |
| [8] | I. V. Shevtsov, V. A. Beznosov, Drive unit for sieve mills of grain cleaning machines, Agrar. Vestn. Urala, 2 (2014), 43-45. |
| [9] | A. M. Giyevskiy, V. I. Orobinsky, A. P. Tarasenko, A. V. Chernyshov, D. O. Kurilov, Substantiation of basic scheme of grain cleaning machine for preparation of agricultural crops seeds, IOP Conf. Ser. Mater. Sci. Eng., 327 (2018), 042035. |
| [10] |
M. Skakov, B. Rakhadilov, M. Scheffler, E. Batyrbekov, Microstructure and tribological properties of electrolyticplasma nitrided high-speed steel, Mat. Test., 57 (2015), 360-364. doi: 10.3139/120.110709

|
| [11] | P. Savinyh, Y. Sychugov, V. Kazakov, S. Ivanovs, Development and theoretical studies of grain cleaning machine for fractional technology of flattening forage grain, in Proceedings of 17th International Scientific Conference Engineering for Rural Development Engineering for Rural Development (2018), 124-130. |
| [12] |
O. Vasylkovskyi, K. Vasylkovska, S. Moroz, M. Sviren, L. Storozhyk, The influence of basic parameters of separating conveyor operation on grain cleaning quality, INMATEH, 57 (2019), 63-70. doi: 10.35633/INMATEH_57_07
|
| [13] | P. P. Aradwad, J. P. Sinha, T. V. Arun Kumar, R. S. Yadav, D. V. K. Samuel, Development of solar powered screen cleaner, Indian J. Agric. Sci., 88 (2018), 1914-1919. |
| [14] | A.V. Vyngra, B. A. Avdeyev, R. F. Abdurakhmanov, V. V. Yenivatov, I. K. Ovcharenko, Mathematical model of start for a piston compressor electric drive of a ship refrigerator, in Proceedings of the 2019 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus, (2019), 373-376. |
| [15] | R. Yarullin, R. Aipov, I. Gabitov, A. Linenko, S. Akchurin, R. Safin, et al., Adjustable driver of grain cleaning vibro-machine with vertical axis of eccentric masses rotation, J. Eng. Appl. Sci., 13 (2018), 6398-6406. |
| [16] | R. Modrzewski, P. Wodziński, Selection of the construction parameters of double-frequency screen for classification of mineral wastes, Rocz. Ochr. Srodowiska, 12 (2010), 697-722. |
| [17] | A.V. Linenko, I. I. Gabitov, V. G. Baynazarov, M.F. Tuktarov, R.S. Aipov, S.V. Akchurin, et al., The mechatronic module "linear electric drive - sieve boot" intelligent control system of grain cleaner, J. Balk. Tribol. Assoc., 25 (2019), 708-717. |
| [18] | A.V. Aristov, A. A. Aristov, A. G. Yudintsev, Oscillating motion motors general theory problems, in Proceedings of the 7th International Scientific and Practical Conference of Students, Post-Graduates and Young Scientists: Modern Techniques and Technology, MTT (2001), 101-103. |
| [19] | L. Chen, D. Li, J. Zhao, Control of a linear reciprocating switched reluctance motor for compressors, in Proceedings of the 14th IEEE Conference on Industrial Electronics and Applications, ICIEA (2019), 2003-2008. |
| [20] | L. A. Neyman, V. Y. Neyman, Dynamic model of a vibratory electromechanical system with spring linkage, in Proceedings - 2016 11th International Forum on Strategic Technology, IFOST (2016), 23-27. |
| [21] | A. V. Solomin, A. A. Chekhova, Magnetic field and current displacement in groove of secondary element of adjustable linear induction motor, in Proceedings - 2019 International Ural Conference on Electrical Power Engineering, UralCon (2019), 271-276. |
| [22] | R. B. Yarullin, A. V. Linenko, On the dynamic characteristics of an induction motor, Electrical and Information Systems and Systems 2 (2013), 42-46. |
| [23] | T. Casandroiu, M. Popescu, G. Voicu, A developing a mathematical model for simulating the seeds separation process on the plane sieves, U.P.B. Sci. Bull. Series D, 71 (2009), 17-27. |
| [24] |
E. Dal-Pastro, P. Facco, E. Bezzo, E. Zamprogna, M. Barolo, Data-driven modelling of milling and sieving operations in wheat milling process, Food Bioprod. Process., 99 (2016), 99-108. doi: 10.1016/j.fbp.2016.04.007
|
| [25] |
V. E. Saitov, R. F. Kurbanov, A. N. Suvorov, Assessing the adequacy of mathematical models of light impurity fractionation in sedimentary chambers of grain cleaning machines, Procedia Eng., 150 (2016), 107-110. doi: 10.1016/j.proeng.2016.06.728
|
| [26] | G. Voicu, T. Casandroiu, C. Tarcolea, Testing stochastic models for simulating the seeds separation process on the sieves of a cleaning system and a comparison with experimental data, Agric. Conspec. Sci., 73 (2008), 95-101. |
Figures(10)

Rustam Aipov, Andrey Linenko, Ildar Badretdinov, Marat Tuktarov, Salavat Akchurin. Research of the work of the sieve mill of a grain-cleaning machine with a linear asynchronous drive[J]. Mathematical Biosciences and Engineering, 2020, 17(4): 4348-4363. doi: 10.3934/mbe.2020240







 DownLoad:
DownLoad: