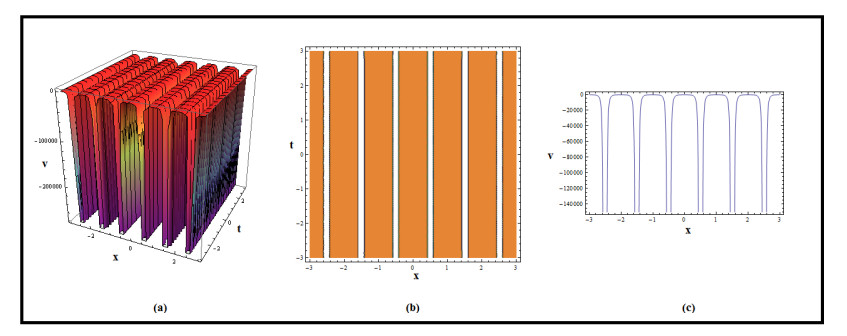
In this article, we use the modified extended direct algebraic method (mEDAM) to explore and analyze the traveling wave phenomena embedded in the quintic conformable Benney-Lin equation (CBLE) that regulates liquid film dynamics. The proposed transformation-based approach developed for nonlinear partial differential equations (PDEs) and fractional PDEs (FPDEs), efficiently produces a plethora of traveling wave solutions for the targeted CBLE, capturing the system's nuanced dynamics. The methodically determined traveling wave solutions are in the form of rational, exponential, hyperbolic and trigonometric functions which include periodic waves, bell-shaped kink waves and signal and double shock waves. To accurately depict the wave phenomena linked to these solutions, we generate 2D, 3D, and contour graphs. These visualizations not only improve understanding of the CBLE model's dynamics, but also provide a detailed way to examine its behavior. Moreover, the use of the proposed techniques contributes to a better understanding of the other FPDEs' distinct characteristics, enhancing our comprehension of their underpinning dynamics.
Citation: Noorah Mshary. Exploration of nonlinear traveling wave phenomena in quintic conformable Benney-Lin equation within a liquid film[J]. AIMS Mathematics, 2024, 9(5): 11051-11075. doi: 10.3934/math.2024542
In this article, we use the modified extended direct algebraic method (mEDAM) to explore and analyze the traveling wave phenomena embedded in the quintic conformable Benney-Lin equation (CBLE) that regulates liquid film dynamics. The proposed transformation-based approach developed for nonlinear partial differential equations (PDEs) and fractional PDEs (FPDEs), efficiently produces a plethora of traveling wave solutions for the targeted CBLE, capturing the system's nuanced dynamics. The methodically determined traveling wave solutions are in the form of rational, exponential, hyperbolic and trigonometric functions which include periodic waves, bell-shaped kink waves and signal and double shock waves. To accurately depict the wave phenomena linked to these solutions, we generate 2D, 3D, and contour graphs. These visualizations not only improve understanding of the CBLE model's dynamics, but also provide a detailed way to examine its behavior. Moreover, the use of the proposed techniques contributes to a better understanding of the other FPDEs' distinct characteristics, enhancing our comprehension of their underpinning dynamics.

| [1] | D. G. Prakasha, P. Veeresha, H. M. Baskonus, Two novel computational techniques for fractional Gardner and Cahn‐Hilliard equations, Comput. Math. Methods, 1 (2019), e1021. |
| [2] | B. Bonilla, M. Rivero, L. Rodriguez-Germa, J. J. Trujillo, Fractional differential equations as alternative models to nonlinear differential equations, Appl. Math. Comput., 187 (2007), 79–88. |
| [3] | P. Veeresha, D. G. Prakasha, Solution for fractional generalized Zakharov equations with Mittag-Leffler function, Results Eng., 5 (2020), 100085. |
| [4] | J. Liouville, Memoire sur quelques questions de geometrie et de mecanique et sur un nouveau genre de calcul pour rsoudre ces quations, Ecole Polytech., 13 (1832), 71–162. |
| [5] | M. Caputo, Elasticita e dissipazione, Bologna: Zanichelli, 1969. |
| [6] |
S. Meng, F. Meng, F. Zhang, Q. Li, Y. Zhang, A. Zemouche, Observer design method for nonlinear generalized systems with nonlinear algebraic constraints with applications, Automatica, 162 (2024), 111512. https://doi.org/10.1016/j.automatica.2024.111512 doi: 10.1016/j.automatica.2024.111512

|
| [7] |
B. Li, T. Guan, L. Dai, G. Duan, Distributionally Robust Model Predictive Control with Output Feedback, IEEE Trans. Autom. Control, 2023. http://doi.org/10.1109/TAC.2023.3321375 doi: 10.1109/TAC.2023.3321375
|
| [8] |
Y. Shi, C. Song, Y. Chen, H. Rao, T. Yang, Complex Standard Eigenvalue Problem Derivative Computation for Laminar-Turbulent Transition Prediction, AIAA J., 61 (2023), 3404–3418. http://doi.org/10.2514/1.J062212 doi: 10.2514/1.J062212
|
| [9] | H. M. He, J. G. Peng, H. Y. Li, Iterative approximation of fixed point problems and variational inequality problems on Hadamard manifolds, UPB Bull. Ser. A, 84 (2022), 25–36. |
| [10] | R. Subashini, C. Ravichandran, K. Jothimani, H. M. Baskonus, Existence results of Hilfer integro-differential equations with fractional order, Discrete Contin. Dyn. Syst.-Ser. S, 13 (2020), 911–923. |
| [11] | M. Alqhtani, K. M. Saad, R. Shah, W. M. Hamanah, Discovering novel soliton solutions for (3+1)-modified fractional Zakharov-Kuznetsov equation in electrical engineering through an analytical approach, Opt. Quant. Electron., 55 (2023), 1149. |
| [12] | C. Ravichandran, K. Jothimani, H. M. Baskonus, N. Valliammal, New results on nondensely characterized integrodifferential equations with fractional order, Eur. Phys. J. Plus, 133 (2018), 109. |
| [13] | N. Valliammal, C. Ravichandran, Z. Hammouch, H. Mehmet Baskonus, A new investigation on fractional-ordered neutral differential systems with state-dependent delay, Int. J. Nonlinear Sci. Numer. Simul., 20 (2019), 803–809. |
| [14] | S. Noor, A. S. Alshehry, N. H. Aljahdaly, H. M. Dutt, I. Khan, R. Shah, Investigating the impact of fractional non-linearity in the Klein-Fock-Gordon equation on quantum dynamics, Symmetry, 15 (2023), 881. |
| [15] | T. Abdeljawad, Q. M. Al-Mdallal, F. Jarad, Fractional logistic models in the frame of fractional operators generated by conformable derivatives, Chaos, Solitons Fractals, 119 (2019), 94–101. |
| [16] | C. Cattani, Connection coefficients of Shannon wavelets, Math. Modell. Anal., 11 (2006), 117–132. |
| [17] | A. Jajarmi, B. Ghanbari, D. Baleanu, A new and efficient numerical method for the fractional modeling and optimal control of diabetes and tuberculosis co-existence, Chaos: Interdiscip. J. Nonlinear Sci., 29 (2019), 093111. |
| [18] | M. Caputo, M. Fabrizio, On the singular kernels for fractional derivatives. Some applications to partial differential equations, Progr. Fract. Differ. Appl., 7 (2021), 79–82. |
| [19] |
X. Cai, R. Tang, H. Zhou, Q. Li, S. Ma, D. Wang, et al., Dynamically controlling terahertz wavefronts with cascaded metasurfaces, Adv. Photonics, 3 (2021), 036003. http://doi.org/10.1117/1.AP.3.3.036003 doi: 10.1117/1.AP.3.3.036003
|
| [20] |
C. Guo, J. Hu, Y. Wu, S. Celikovsky, Non-Singular Fixed-Time Tracking Control of Uncertain Nonlinear Pure-Feedback Systems With Practical State Constraints, IEEE Trans. Circuits Syst. I, 70 (2023), 3746–3758. http://doi.org/10.1109/TCSI.2023.3291700 doi: 10.1109/TCSI.2023.3291700
|
| [21] |
C. Guo, J. Hu, J. Hao, S. Celikovsky, X. Hu, Fixed-time safe tracking control of uncertain high-order nonlinear pure-feedback systems via unified transformation functions, Kybernetika, 59 (2023), 342–364. http://doi.org/10.14736/kyb-2023-3-0342 doi: 10.14736/kyb-2023-3-0342
|
| [22] |
X. Bai, Y. He, M. Xu, Low-Thrust Reconfiguration Strategy and Optimization for Formation Flying Using Jordan Normal Form, IEEE Trans. Aerosp. Electron. Syst., 57 (2021), 3279–3295. http://doi.org/10.1109/TAES.2021.3074204 doi: 10.1109/TAES.2021.3074204
|
| [23] |
Y. Kai, J. Ji, Z. Yin, Study of the generalization of regularized long-wave equation, Nonlinear Dyn., 107 (2022), 2745–2752. http://doi.org/10.1007/s11071-021-07115-6 doi: 10.1007/s11071-021-07115-6
|
| [24] |
Y. Kai, Z. Yin, On the Gaussian traveling wave solution to a special kind of Schrodinger equation with logarithmic nonlinearity, Mod. Phys. Lett. B, 36 (2021), 2150543. http://doi.org/10.1142/S0217984921505436 doi: 10.1142/S0217984921505436
|
| [25] |
X. Zhou, X. Liu, G. Zhang, L. Jia, X. Wang, Z. Zhao, An Iterative Threshold Algorithm of Log-Sum Regularization for Sparse Problem, IEEE Trans. Circuits Syst. Video Technol., 33 (2023), 4728–4740. http://doi.org/10.1109/TCSVT.2023.3247944 doi: 10.1109/TCSVT.2023.3247944
|
| [26] | D. Benney, Long waves on liquid films, J. Math. Phys., 45 (1966), 150–155. |
| [27] | S. P. Lin, Finite amplitude side-band stability of a viscous film, J. Fluid Mech., 63 (1974), 417–429. |
| [28] | W. Gao, P. Veeresha, D. G. Prakasha, H. M. Baskonus, New numerical simulation for fractional Benney-Lin equation arising in falling film problems using two novel techniques, Numer. Methods Partial Differ. Eq., 37 (2021), 210–243. |
| [29] | N. G. Berloff, L. N. Howard, Solitary and periodic solutions of nonlinear nonintegrable equations, Stud. Appl. Math., 99 (1997), 1–24. |
| [30] | H. A. Biagioni, F. Linares, On the Benney–Lin and Kawahara equations, J. Math. Anal. Appl., 211 (1997), 131–152. |
| [31] | S. B. Cui, D. G. Deng, S. P. Tao, Global existence of solutions for the Cauchy problem of the Kawahara equation with L 2 initial data, Acta Math. Sin., 22 (2006), 1457–1466. |
| [32] | H. Tariq, G. Akram, Residual power series method for solving time-space-fractional Benney-Lin equation arising in falling film problems, J. Appl. Math. Comput., 55 (2017), 683–708. |
| [33] | P. K. Gupta, Approximate analytical solutions of fractional Benney–Lin equation by reduced differential transform method and the homotopy perturbation method, Comput. Math. Appl., 61 (2011), 2829–2842. |
| [34] | Y. X. Xie, New explicit and exact solutions of the Benney-Kawahara-Lin equation, Chin. Phys. B, 18 (2009), 4094. |
| [35] | K. K. Ali, R. Yilmazer, H. M. Baskonus, H. Bulut, Modulation instability analysis and analytical solutions to the system of equations for the ion sound and Langmuir waves, Phys. Scr., 95 (2020), 065602. |
| [36] | H. Qin, R. A. Attia, M. Khater, D. Lu, Ample soliton waves for the crystal lattice formation of the conformable time-fractional (N+ 1) Sinh-Gordon equation by the modified Khater method and the Painleve property, J. Intell. Fuzzy Syst., 38 (2020), 2745–2752. |
| [37] | A. Gaber, H. Ahmad, Solitary wave solutions for space-time fractional coupled integrable dispersionless system via generalized kudryashov method, Facta Univ. Ser.: Math. Inf., 35 (2021), 1439–1449. |
| [38] | H. Yasmin, A. S. Alshehry, A. M. Saeed, R. Shah, K. Nonlaopon, Application of the q-Homotopy Analysis Transform Method to Fractional-Order Kolmogorov and Rosenau-Hyman Models within the Atangana-Baleanu Operator, Symmetry, 15 (2023), 671. |
| [39] | J. H. He, Exp-function method for fractional differential equations, Int. J. Nonlinear Sci. Numer. Simul., 14 (2013), 363–366. |
| [40] | H. Khan, R. Shah, J. F. Goómez-Aguilar, D. Baleanu, P. Kumam, Traveling waves solution for fractional-order biological population model, Math. Modell. Nat. Phenom., 16 (2021), 32. |
| [41] | H. Yasmin, N. H. Aljahdaly, A. M. Saeed, R. Shah, Investigating Symmetric Soliton Solutions for the Fractional Coupled Konno-Onno System Using Improved Versions of a Novel Analytical Technique, Mathematics, 11 (2023), 2686. |
| [42] | M. M. Al-Sawalha, H. Yasmin, R. Shah, A. H. Ganie, K. Moaddy, Unraveling the Dynamics of Singular Stochastic Solitons in Stochastic Fractional Kuramoto–Sivashinsky Equation, Fractal Fract., 7 (2023), 753. |
| [43] | M. Alquran, Dynamic behavior of explicit elliptic and quasi periodic-wave solutions to the generalized (2+ 1)-dimensional Kundu-Mukherjee-Naskar equation, Optik, 301 (2024), 171697. |
| [44] | H. Yasmin, A. S. Alshehry, A. H. Ganie, A. M. Mahnashi, Perturbed Gerdjikov-Ivanov equation: Soliton solutions via Backlund transformation, Optik, 298 (2024), 171576. |
| [45] | I. Jaradat, M. Alquran, A variety of physical structures to the generalized equal-width equation derived from Wazwaz-Benjamin-Bona-Mahony model, J. Ocean Eng. Sci., 7 (2022), 244–247. |
| [46] | S. A. El-Tantawy, H. A. Alyousef, R. T. Matoog, R. Shah, On the optical soliton solutions to the fractional complex structured (1+ 1)-dimensional perturbed gerdjikov-ivanov equation, Phys. Scr., 99 (2024), 035249. |
| [47] | M. Alquran, Necessary conditions for convex-periodic, elliptic-periodic, inclined-periodic, and rogue wave-solutions to exist for the multi-dispersions Schrodinger equation, Phys. Scr., 99 (2024), 025248. |
| [48] | M. Alquran, The amazing fractional Maclaurin series for solving different types of fractional mathematical problems that arise in physics and engineering, Partial Differ. Eq. Appl. Math., 7 (2023), 100506. |
| [49] | S. Alshammari, K. Moaddy, M. Alshammari, Z. Alsheekhhussain, M. M. Al-Sawalha, M. Yar, Analysis of solitary wave solutions in the fractional-order Kundu-Eckhaus system, Sci. Rep., 14 (2024), 3688. |
| [50] | S. Mukhtar, S. Noor, The numerical investigation of a fractional-order multi-dimensional Model of Navier-Stokes equation via novel techniques, Symmetry, 14 (2022), 1102. |
| [51] | P. Sunthrayuth, A. M. Zidan, S. W. Yao, M. Inc, The comparative study for solving fractional-order Fornberg-Whitham equation via $\rho$-Laplace transform, Symmetry, 13 (2021), 784. |
| [52] | R. Shah, D. Baleanu, Fractional Whitham-Broer-Kaup equations within modified analytical approaches, Axioms, 8 (2019), 125. |
| [53] | A. Saad Alshehry, M. Imran, A. Khan, W. Weera, Fractional View Analysis of Kuramoto-Sivashinsky Equations with Non-Singular Kernel Operators, Symmetry, 14 (2022), 1463. |
| [54] |
M. M. Al-Sawalha, A. Khan, O. Y. Ababneh, T. Botmart, Fractional view analysis of Kersten-Krasil'shchik coupled KdV-mKdV systems with non-singular kernel derivatives, AIMS Mathematics, 7 (2022), 18334–18359. https://doi.org/10.3934/math.20221010 doi: 10.3934/math.20221010
|
| [55] | H. Yasmin, A. S. Alshehry, A. H. Ganie, A. Shafee, R. Shah, Noise effect on soliton phenomena in fractional stochastic Kraenkel-Manna-Merle system arising in ferromagnetic materials, Sci. Rep., 14 (2024), 1810. |
| [56] | J. H. He, S. K. Elagan, Z. B. Li, Geometrical explanation of the fractional complex transform and derivative chain rule for fractional calculus, Phys. Lett. A, 376 (2012), 257–259. |
| [57] | Sarikaya, M. Zeki, H. Budak, H. Usta, On generalized the conformable fractional calculus, TWMS J. Appl. Eng. Math., 9 (2019), 792–799. |






Figures(7)

Noorah Mshary. Exploration of nonlinear traveling wave phenomena in quintic conformable Benney-Lin equation within a liquid film[J]. AIMS Mathematics, 2024, 9(5): 11051-11075. doi: 10.3934/math.2024542







 DownLoad:
DownLoad: