The objective of this study was to analyze the complex dynamics of a discrete-time predator-prey system by using the piecewise constant argument technique. The existence and stability of fixed points were examined. It was shown that the system experienced period-doubling (PD) and Neimark-Sacker (NS) bifurcations at the positive fixed point by using the center manifold and bifurcation theory. The management of the system's bifurcating and fluctuating behavior may be controlled via the use of feedback and hybrid control approaches. Both methods were effective in controlling bifurcation and chaos. Furthermore, we used numerical simulations to empirically validate our theoretical findings. The chaotic behaviors of the system were recognized through bifurcation diagrams and maximum Lyapunov exponent graphs. The stability of the positive fixed point within the optimal prey growth rate range $ A_1 < a < A_2 $ was highlighted by our observations. When the value of $ a $ falls below a certain threshold $ A_1 $, it becomes challenging to effectively sustain prey populations in the face of predation, thereby affecting the survival of predators. When the growth rate surpasses a specific threshold denoted as $ A_2 $, it initiates a phase of rapid expansion. Predators initially benefit from this phase because it supplies them with sufficient food. Subsequently, resource depletion could occur, potentially resulting in long-term consequences for populations of both the predator and prey. Therefore, a moderate amount of prey's growth rate was beneficial for both predator and prey populations.
Citation: Saud Fahad Aldosary, Rizwan Ahmed. Stability and bifurcation analysis of a discrete Leslie predator-prey system via piecewise constant argument method[J]. AIMS Mathematics, 2024, 9(2): 4684-4706. doi: 10.3934/math.2024226
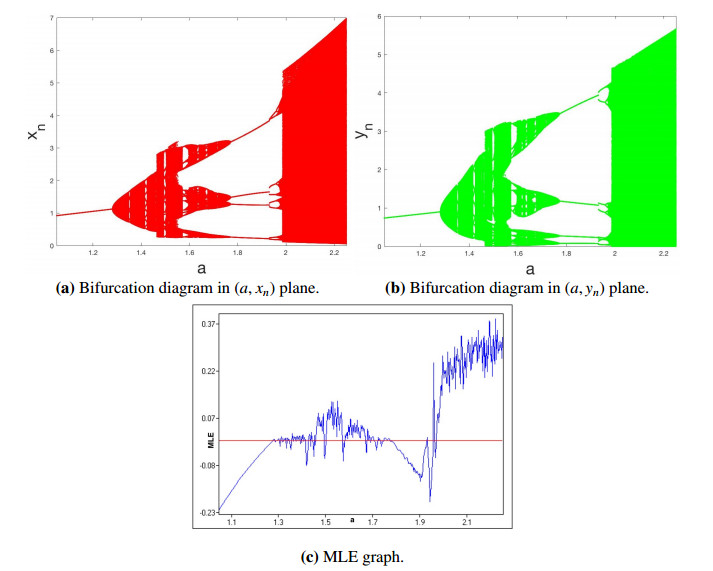
The objective of this study was to analyze the complex dynamics of a discrete-time predator-prey system by using the piecewise constant argument technique. The existence and stability of fixed points were examined. It was shown that the system experienced period-doubling (PD) and Neimark-Sacker (NS) bifurcations at the positive fixed point by using the center manifold and bifurcation theory. The management of the system's bifurcating and fluctuating behavior may be controlled via the use of feedback and hybrid control approaches. Both methods were effective in controlling bifurcation and chaos. Furthermore, we used numerical simulations to empirically validate our theoretical findings. The chaotic behaviors of the system were recognized through bifurcation diagrams and maximum Lyapunov exponent graphs. The stability of the positive fixed point within the optimal prey growth rate range $ A_1 < a < A_2 $ was highlighted by our observations. When the value of $ a $ falls below a certain threshold $ A_1 $, it becomes challenging to effectively sustain prey populations in the face of predation, thereby affecting the survival of predators. When the growth rate surpasses a specific threshold denoted as $ A_2 $, it initiates a phase of rapid expansion. Predators initially benefit from this phase because it supplies them with sufficient food. Subsequently, resource depletion could occur, potentially resulting in long-term consequences for populations of both the predator and prey. Therefore, a moderate amount of prey's growth rate was beneficial for both predator and prey populations.

| [1] |
A. Kashyap, Q. Zhu, H. Sarmah, D. Bhattacharjee, Dynamical study of a predator-prey system with Michaelis-Menten type predator-harvesting, Int. J. Biomath., 16 (2023), 2250135. http://dx.doi.org/10.1142/S1793524522501352 doi: 10.1142/S1793524522501352

|
| [2] |
M. Ghori, P. Naik, J. Zu, Z. Eskandari, M. Naik, Global dynamics and bifurcation analysis of a fractional-order SEIR epidemic model with saturation incidence rate, Math. Method. Appl. Sci., 45 (2022), 3665–3688. http://dx.doi.org/10.1002/mma.8010 doi: 10.1002/mma.8010
|
| [3] |
W. Lu, Y. Xia, Multiple periodicity in a predator-prey model with prey refuge, Mathematics, 10 (2022), 421. http://dx.doi.org/10.3390/math10030421 doi: 10.3390/math10030421
|
| [4] |
A. Matouk, Chaos and bifurcations in a discretized fractional model of quasi-periodic plasma perturbations, Int. J. Nonlin. Sci. Num., 23 (2022), 1109–1127. http://dx.doi.org/10.1515/ijnsns-2020-0101 doi: 10.1515/ijnsns-2020-0101
|
| [5] |
E. González-Olivares, A. Rojas-Palma, Limit cycles in a Gause-type predator-prey model with sigmoid functional response and weak Allee effect on prey, Math. Method. Appl. Sci., 35 (2012), 963–975. http://dx.doi.org/10.1002/mma.2509 doi: 10.1002/mma.2509
|
| [6] |
A. Elsadany, Q. Din, S. Salman, Qualitative properties and bifurcations of discrete-time Bazykin-Berezovskaya predator-prey model, Int. J. Biomath., 13 (2020), 2050040. http://dx.doi.org/10.1142/S1793524520500400 doi: 10.1142/S1793524520500400
|
| [7] |
D. Sen, S. Ghorai, M. Banerjee, A. Morozov, Bifurcation analysis of the predator-prey model with the allee effect in the predator, J. Math. Biol., 84 (2022), 7. http://dx.doi.org/10.1007/s00285-021-01707-x doi: 10.1007/s00285-021-01707-x
|
| [8] |
A. Suleman, R. Ahmed, F. Alshammari, N. Shah, Dynamic complexity of a slow-fast predator-prey model with herd behavior, AIMS Mathematics, 8 (2023), 24446–24472. http://dx.doi.org/10.3934/math.20231247 doi: 10.3934/math.20231247
|
| [9] |
A. Lotka, Elements of physical biology, Nature, 116 (1925), 461. http://dx.doi.org/10.1038/116461b0 doi: 10.1038/116461b0
|
| [10] |
V. Volterra, Fluctuations in the abundance of a species considered mathematically, Nature, 118 (1926), 558–560. http://dx.doi.org/10.1038/118558a0 doi: 10.1038/118558a0
|
| [11] |
P. Leslie, Some further notes on the use of matrices in population mathematics, Biometrika, 35 (1948), 213–245. http://dx.doi.org/10.2307/2332342 doi: 10.2307/2332342
|
| [12] |
P. Leslie, A stochastic model for studying the properties of certain biological systems by numerical methods, Biometrika, 45 (1958), 16–31. http://dx.doi.org/10.2307/2333042 doi: 10.2307/2333042
|
| [13] | N. Britton, Essential mathematical biology, London: Springer, 2003. http://dx.doi.org/10.1007/978-1-4471-0049-2 |
| [14] |
M. Zhao, C. Li, J. Wang, Complex dynamic behaviors of a discrete-time predator-prey system, J. Appl. Anal. Comput., 7 (2017), 478–500. http://dx.doi.org/10.11948/2017030 doi: 10.11948/2017030
|
| [15] |
S. Rana, Dynamics and chaos control in a discrete-time ratio-dependent Holling-Tanner model, J. Egypt. Math. Soc., 27 (2019), 48. http://dx.doi.org/10.1186/s42787-019-0055-4 doi: 10.1186/s42787-019-0055-4
|
| [16] |
P. Baydemir, H. Merdan, E. Karaoglu, G. Sucu, Complex dynamics of a discrete-time prey-predator system with Leslie type: Stability, bifurcation analyses and chaos, Int. J. Bifurcat. Chaos, 30 (2020), 2050149. http://dx.doi.org/10.1142/s0218127420501497 doi: 10.1142/s0218127420501497
|
| [17] |
S. Akhtar, R. Ahmed, M. Batool, N. Shah, J. Chung, Stability, bifurcation and chaos control of a discretized Leslie prey-predator model, Chaos Soliton. Fract., 152 (2021), 111345. http://dx.doi.org/10.1016/j.chaos.2021.111345 doi: 10.1016/j.chaos.2021.111345
|
| [18] |
P. Naik, Z. Eskandari, H. Shahraki, Flip and generalized flip bifurcations of a two-dimensional discrete-time chemical model, Mathematical Modelling and Numerical Simulation with Applications, 1 (2021), 95–101. http://dx.doi.org/10.53391/mmnsa.2021.01.009 doi: 10.53391/mmnsa.2021.01.009
|
| [19] | Z. Eskandari, Z. Avazzadeh, R. Ghaziani, B. Li, Dynamics and bifurcations of a discrete-time Lotka-Volterra model using nonstandard finite difference discretization method, Math. Method. Appl. Sci., in press. http://dx.doi.org/10.1002/mma.8859 |
| [20] |
P. Naik, Z. Eskandari, Z. Avazzadeh, J. Zu, Multiple bifurcations of a discrete-time prey-predator model with mixed functional response, Int. J. Bifurcat. Chaos, 32 (2022), 2250050. http://dx.doi.org/10.1142/s021812742250050x doi: 10.1142/s021812742250050x
|
| [21] |
P. Naik, Z. Eskandari, A. Madzvamuse, Z. Avazzadeh, J. Zu, Complex dynamics of a discrete-time seasonally forced SIR epidemic model, Math. Method. Appl. Sci., 46 (2023), 7045–7059. http://dx.doi.org/10.1002/mma.8955 doi: 10.1002/mma.8955
|
| [22] |
W. Liu, D. Cai, Bifurcation, chaos analysis and control in a discrete-time predator-prey system, Adv. Differ. Equ., 2019 (2019), 11. http://dx.doi.org/10.1186/s13662-019-1950-6 doi: 10.1186/s13662-019-1950-6
|
| [23] |
Y. Li, F. Zhang, X. Zhuo, Flip bifurcation of a discrete predator-prey model with modified Leslie-Gower and Holling-type iii schemes, Math. Biosci. Eng., 17 (2020), 2003–2015. http://dx.doi.org/10.3934/mbe.2020106 doi: 10.3934/mbe.2020106
|
| [24] |
Rajni, B. Ghosh, Multistability, chaos and mean population density in a discrete-time predator-prey system, Chaos Soliton. Fract., 162 (2022), 112497. http://dx.doi.org/10.1016/j.chaos.2022.112497 doi: 10.1016/j.chaos.2022.112497
|
| [25] |
A. Yousef, A. Algelany, A. Elsadany, Codimension one and codimension two bifurcations in a discrete Kolmogorov type predator-prey model, J. Comput. Appl. Math., 428 (2023), 115171. http://dx.doi.org/10.1016/j.cam.2023.115171 doi: 10.1016/j.cam.2023.115171
|
| [26] |
A. Khan, I. Alsulami, Complicate dynamical analysis of a discrete predator-prey model with a prey refuge, AIMS Mathematics, 8 (2023), 15035–15057. http://dx.doi.org/10.3934/math.2023768 doi: 10.3934/math.2023768
|
| [27] |
A. Tassaddiq, M. Shabbir, Q. Din, H. Naaz, Discretization, bifurcation, and control for a class of predator-prey interactions, Fractal Fract., 6 (2022), 31. http://dx.doi.org/10.3390/fractalfract6010031 doi: 10.3390/fractalfract6010031
|
| [28] |
S. Lin, F. Chen, Z. Li, L. Chen, Complex dynamic behaviors of a modified discrete Leslie-Gower predator-prey system with fear effect on prey species, Axioms, 11 (2022), 520. http://dx.doi.org/10.3390/axioms11100520 doi: 10.3390/axioms11100520
|
| [29] |
P. Naik, Z. Eskandari, M. Yavuz, J. Zu, Complex dynamics of a discrete-time Bazykin-Berezovskaya prey-predator model with a strong Allee effect, J. Comput. Appl. Math., 413 (2022), 114401. http://dx.doi.org/10.1016/j.cam.2022.114401 doi: 10.1016/j.cam.2022.114401
|
| [30] |
R. Ahmed, M. Rafaqat, I. Siddique, M. Arefin, Complex dynamics and chaos control of a discrete-time predator-prey model, Discrete Dyn. Nat. Soc., 2023 (2023), 8873611. http://dx.doi.org/10.1155/2023/8873611 doi: 10.1155/2023/8873611
|
| [31] |
A. Khan, I. Alsulami, Discrete Leslie's model with bifurcations and control, AIMS Mathematics, 8 (2023), 22483–22506. http://dx.doi.org/10.3934/math.20231146 doi: 10.3934/math.20231146
|
| [32] | A. Luo, Regularity and complexity in dynamical systems, New York: Springer, 2012. http://dx.doi.org/10.1007/978-1-4614-1524-4 |
| [33] | J. Guckenheimer, P. Holmes, Nonlinear oscillations, dynamical systems, and bifurcations of vector fields, New York: Springer, 1983. http://dx.doi.org/10.1007/978-1-4612-1140-2 |
| [34] | S. Wiggins, Introduction to applied nonlinear dynamical systems and chaos, New York: Springer, 1990. http://dx.doi.org/10.1007/978-1-4757-4067-7 |
| [35] | G. Chen, X. Dong, From chaos to order: methodologies, perspectives and applications, Singapore: World Scientific, 1998. http://dx.doi.org/10.1142/3033 |
| [36] |
C. Lei, X. Han, W. Wang, Bifurcation analysis and chaos control of a discrete-time prey-predator model with fear factor, Math. Biosci. Eng., 19 (2022), 6659–6679. http://dx.doi.org/10.3934/mbe.2022313 doi: 10.3934/mbe.2022313
|
| [37] |
X. Luo, G. Chen, B. Wang, J. Fang, Hybrid control of period-doubling bifurcation and chaos in discrete nonlinear dynamical systems, Chaos Soliton. Fract., 18 (2003), 775–783. http://dx.doi.org/10.1016/s0960-0779(03)00028-6 doi: 10.1016/s0960-0779(03)00028-6
|





Figures(6)

Saud Fahad Aldosary, Rizwan Ahmed. Stability and bifurcation analysis of a discrete Leslie predator-prey system via piecewise constant argument method[J]. AIMS Mathematics, 2024, 9(2): 4684-4706. doi: 10.3934/math.2024226







 DownLoad:
DownLoad: