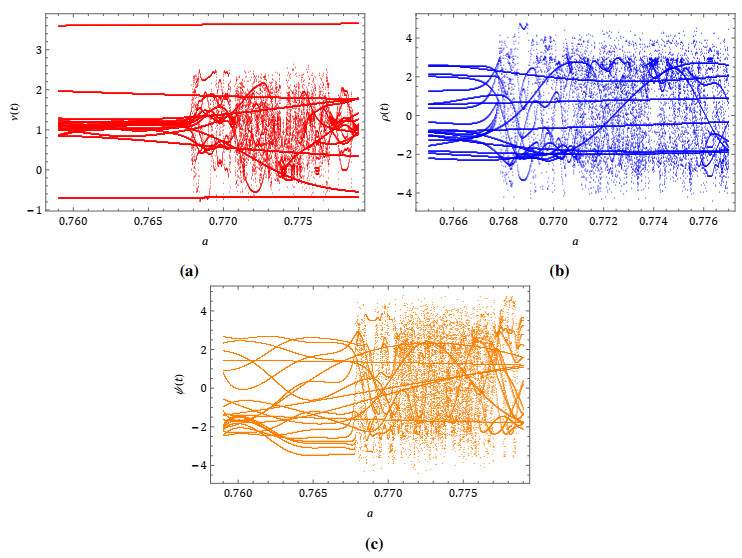
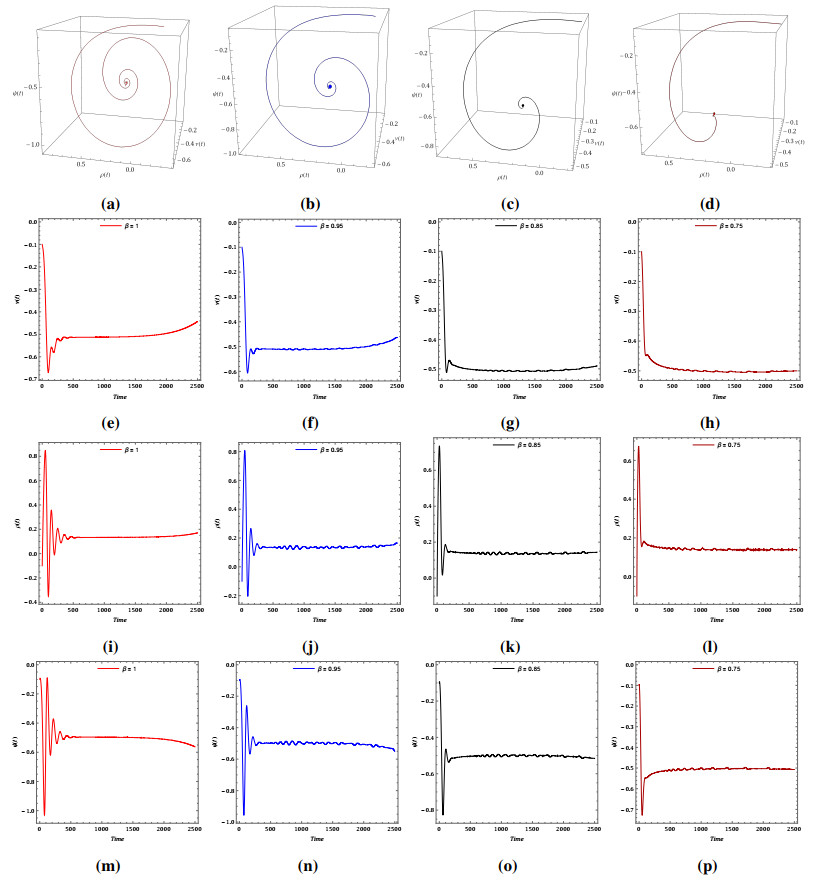
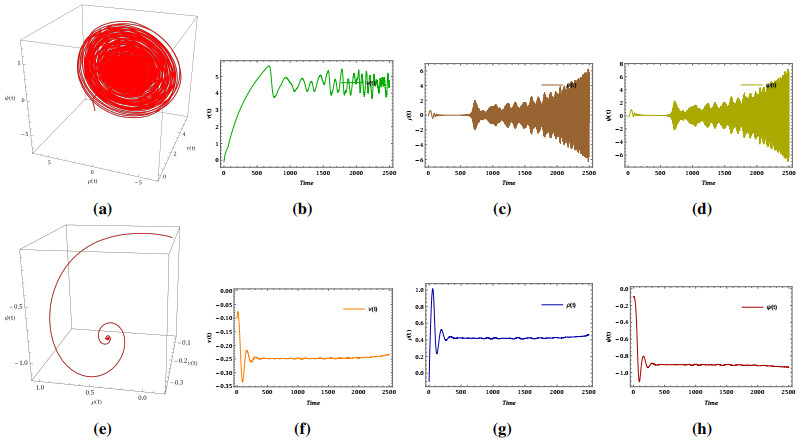
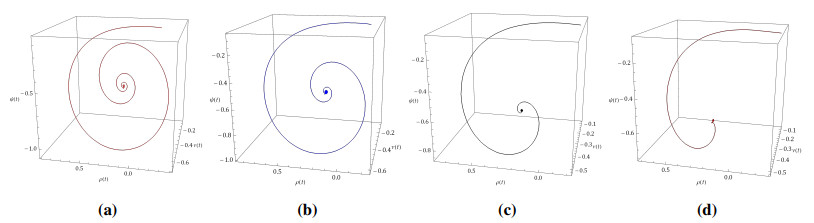
In this study, changes in westerly waves and their connections to increased global warming under the influence of greenhouse gases were investigated via a Caputo fractional four-dimensional atmospheric system. The idea of the existence of chaotic behavior in the westerly wind's motion was depicted. It has been noted that westerlies are becoming stronger due to rising air temperatures. An analysis of the existence, uniqueness, boundedness, stability of equilibrium points, and conservative behavior of the solutions was conducted. To prove the existence of chaos in the modified model, the Lyapunov exponents, Poincaré map, and bifurcation were computed. A sliding mode controller to control the chaos in this novel fractional-order system was designed, and conditions for the global stability of the controlled system with and without external disturbances and uncertainties were derived. The finite-time interval for the system to reach the sliding surface was computed. The developed controller's performance was evaluated with respect to both commensurate and non-commensurate fractional derivatives. In each scenario, the impact of fractional orders was investigated. Numerical simulations were used to support theoretical statements about how the controller affects the system.
Citation: Asharani J. Rangappa, Chandrali Baishya, Reny George, Sina Etemad, Zaher Mundher Yaseen. On the existence, stability and chaos analysis of a novel 4D atmospheric dynamical system in the context of the Caputo fractional derivatives[J]. AIMS Mathematics, 2024, 9(10): 28560-28588. doi: 10.3934/math.20241386
In this study, changes in westerly waves and their connections to increased global warming under the influence of greenhouse gases were investigated via a Caputo fractional four-dimensional atmospheric system. The idea of the existence of chaotic behavior in the westerly wind's motion was depicted. It has been noted that westerlies are becoming stronger due to rising air temperatures. An analysis of the existence, uniqueness, boundedness, stability of equilibrium points, and conservative behavior of the solutions was conducted. To prove the existence of chaos in the modified model, the Lyapunov exponents, Poincaré map, and bifurcation were computed. A sliding mode controller to control the chaos in this novel fractional-order system was designed, and conditions for the global stability of the controlled system with and without external disturbances and uncertainties were derived. The finite-time interval for the system to reach the sliding surface was computed. The developed controller's performance was evaluated with respect to both commensurate and non-commensurate fractional derivatives. In each scenario, the impact of fractional orders was investigated. Numerical simulations were used to support theoretical statements about how the controller affects the system.

| [1] |
J. E. Skinner, M. Molnar, T. Vybiral, M. Mitra, Application of chaos theory to biology and medicine, Integr. Physiol. Behav. Sci., 27 (1992), 39–53. https://doi.org/10.1007/bf02691091 doi: 10.1007/bf02691091

|
| [2] |
Y. Liu, Circuit implementation and finite-time synchronization of the 4D Rabinovich hyperchaotic system, Nonlinear Dyn., 67 (2012), 89–96. https://doi.org/10.1007/s11071-011-9960-2 doi: 10.1007/s11071-011-9960-2
|
| [3] |
M. E. Sahin, Z. G. Cam Taskiran, H. Guler, S. E. Hamamci, Application and modeling of a novel 4D memristive chaotic system for communication systems, Circuits Syst. Signal Process., 39 (2020), 3320–3349. https://doi.org/10.1007/s00034-019-01332-6 doi: 10.1007/s00034-019-01332-6
|
| [4] |
E. N. Lorenz, Irregularity: a fundamental property of the atmosphere, Tellus A, 36A (1984), 98–110. https://doi.org/10.3402/tellusa.v36i2.11473 doi: 10.3402/tellusa.v36i2.11473
|
| [5] | Y. Yu, Dynamical analysis of a low-order model representing Hadley circulation, J. Beijing Jiaotong Univ., 30 (2006), 50–53. |
| [6] | I. Podlubny, Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications, Academic Press, 1998. |
| [7] |
N. Sene, Analysis of a four-dimensional hyperchaotic system described by the Caputo-Liouville fractional derivative, Complexity, 2020 (2020), 8889831. https://doi.org/10.1155/2020/8889831 doi: 10.1155/2020/8889831
|
| [8] |
Y. Cao, Y. Kao, J. H. Park, H. Bao, Global Mittag-Leffler stability of the delayed fractional-coupled reaction-diffusion system on networks without strong connectedness, IEEE Trans. Neural Networks Learn. Syst., 33 (2022), 6473–6483. https://doi.org/10.1109/TNNLS.2021.3080830 doi: 10.1109/TNNLS.2021.3080830
|
| [9] |
R. N. Premakumari, C. Baishya, M. K. A. Kaabar, Dynamics of a fractional plankton-fish model under the influence of toxicity, refuge, and combine-harvesting efforts, J. Inequal. Appl., 2022 (2022), 137. https://doi.org/10.1186/s13660-022-02876-z doi: 10.1186/s13660-022-02876-z
|
| [10] | S. Vaidyanathan, A. T. Azar, Analysis and control of a 4-D novel hyperchaotic system, In: A. Azar, S. Vaidyanathan, Chaos modeling and control systems design: studies in computational intelligence, Springer, Cham, 581 (2015), 3–17. https://doi.org/10.1007/978-3-319-13132-0_1 |
| [11] |
L. O. Chua, M. Itoh, L. Kocarev, K. Eckert, Chaos synchronization in Chua's Circuit, J. Circuits Syst. Comput., 3 (1993), 93–108. https://doi.org/10.1142/S0218126693000071 doi: 10.1142/S0218126693000071
|
| [12] |
D. Baleanu, S. S. Sajjadi, J. H. Asad, A. Jajarmi, E. Estiri, Hyperchaotic behaviors, optimal control, and synchronization of a nonautonomous cardiac conduction system, Adv. Differ. Equ., 2021 (2021), 157. https://doi.org/10.1186/s13662-021-03320-0 doi: 10.1186/s13662-021-03320-0
|
| [13] |
U. E. Kocamaz, B. Cevher, Y. Uyaroǧlu, Control and synchronization of chaos with sliding mode control based on cubic reaching rule, Chaos Soliton. Fract., 105 (2017), 92–98. https://doi.org/10.1016/j.chaos.2017.10.008 doi: 10.1016/j.chaos.2017.10.008
|
| [14] |
Y. Kao, Y. Li, J. H. Park, X. Chen, Mittag-Leffler synchronization of delayed fractional memristor neural networks via adaptive control, IEEE Trans. Neural Networks Learn. Syst., 32 (2021), 2279–2284. https://doi.org/10.1109/TNNLS.2020.2995718 doi: 10.1109/TNNLS.2020.2995718
|
| [15] |
C. Baishya, M. K. Naik, R. N. Premakumari, Design and implementation of a sliding mode controller and adaptive sliding mode controller for a novel fractional chaotic class of equations, Results Control Optim., 14 (2024), 100338. https://doi.org/10.1016/j.rico.2023.100338 doi: 10.1016/j.rico.2023.100338
|
| [16] | A. Moufid, N. Bennis, A multi-modelling approach and optimal control of greenhouse climate, In: S. El Hani, M. Essaaidi, Recent advances in electrical and information technologies for sustainable development, Advances in Science, Technology & Innovation, Cham: Springer, 2019,201–208. https://doi.org/10.1007/978-3-030-05276-8_22 |
| [17] |
R. N. Premakumari, C. Baishya, M. E. Samei, M. K. Naik, A novel optimal control strategy for nutrient-phytoplankton-zooplankton model with viral infection in plankton, Commun. Nonlinear Sci. Numer. Simul., 137 (2024), 108157. https://doi.org/10.1016/j.cnsns.2024.108157 doi: 10.1016/j.cnsns.2024.108157
|
| [18] |
S. Vaidyanathan, Global stabilisation of control systems using a new sliding mode control method and its application to a general type of synchronisation for chaotic systems, Int. J. Model. Identif. Control, 40 (2022), 1–10. https://doi.org/10.1504/IJMIC.2022.124067 doi: 10.1504/IJMIC.2022.124067
|
| [19] |
M. K. Naik, C. Baishya, R. N. Premakumari, M. E. Samei, Navigating climate complexity and its control via hyperchaotic dynamics in a 4D Caputo fractional model, Sci. Rep., 14 (2024), 18015. https://doi.org/10.1038/s41598-024-68769-x doi: 10.1038/s41598-024-68769-x
|
| [20] |
M. Roohi, S. Mirzajani, A. Basse-O'Connor, A no-chatter single-input finite-time PID sliding mode control technique for stabilization of a class of 4D chaotic fractional order laser systems, Mathematics, 11 (2023), 21. https://doi.org/10.3390/math11214463 doi: 10.3390/math11214463
|
| [21] | Y. Kao, C. Wang, H. Xia, Y. Cao, Projective synchronization for uncertain fractional reaction-diffusion systems via adaptive sliding mode control based on finite-time scheme, In: Analysis and control for fractional-order systems, Singapore: Springer, 2024,141–163. https://doi.org/10.1007/978-981-99-6054-5_8 |
| [22] |
Y. Cao, Y. Kao, Z. Wang, X. Yang, J. H. Park, W. Xie, Sliding mode control for uncertain fractional order reaction-diffusion memristor neural networks with time delays, Neural Networks, 178 (2024), 106402. https://doi.org/10.1016/j.neunet.2024.106402 doi: 10.1016/j.neunet.2024.106402
|
| [23] |
Y. Kao, Y. Cao, X. Chen, Global Mittag-Leffler synchronization of coupled delayed fractional reaction-diffusion Cohen-Grossberg neural networks via sliding mode control, Chaos, 32 (2022), 113123. https://doi.org/10.1063/5.0102787 doi: 10.1063/5.0102787
|
| [24] |
P. J. Roebber, Climate variability in a low-order coupled atmosphere-ocean model, Tellus A, 47 (1995), 473–494. https://doi.org/10.3402/tellusa.v47i4.11534 doi: 10.3402/tellusa.v47i4.11534
|
| [25] |
A. Chakraborty, P. Veeresha, Effects of global warming, time delay and chaos control on the dynamics of a chaotic atmospheric propagation model within the frame of Caputo fractional operator, Commun. Nonlinear Sci. Numer. Simul., 128 (2024), 107657. https://doi.org/10.1016/j.cnsns.2023.107657 doi: 10.1016/j.cnsns.2023.107657
|
| [26] |
R. N. Premakumari, C. Baishya, P. Veeresha, L. Akinyemi, A fractional atmospheric circulation system under the influence of a sliding mode controller, Symmetry, 14 (2022), 2618. https://doi.org/10.3390/sym14122618 doi: 10.3390/sym14122618
|
| [27] |
J. Singh, R. Agrawal, K. S. Nisar, A new forecasting behavior of fractional model of atmospheric dynamics of carbon dioxide gas, Partial Differ. Equ. Appl. Math., 9 (2024), 100595. https://doi.org/10.1016/j.padiff.2023.100595 doi: 10.1016/j.padiff.2023.100595
|
| [28] |
S. Etemad, S. K. Ntouyas, I. Stamova, J. Tariboon, On solutions of two post-quantum fractional generalized sequential Navier problems: an application on the elastic beam, Fractal Fract., 8 (2024), 236. https://doi.org/10.3390/fractalfract8040236 doi: 10.3390/fractalfract8040236
|
| [29] |
T. Kanwal, A. Hussain, İ. Avcı, S. Etemad, S. Rezapour, D. F. M. Torres, Dynamics of a model of polluted lakes via fractal-fractional operators with two different numerical algorithms, Chaos Soliton. Fract., 181 (2024), 114653. https://doi.org/10.1016/j.chaos.2024.114653 doi: 10.1016/j.chaos.2024.114653
|
| [30] |
P. Y. Dousseh, C. Ainamon, C. H. Miwadinou, A. V. Monwanou, J. B. C. Orou, Chaos in a financial system with fractional order and its control via sliding mode, Complexity, 2021 (2021), 4636658. https://doi.org/10.1155/2021/4636658 doi: 10.1155/2021/4636658
|
| [31] |
C. T. Deressa, S. Etemad, S. Rezapour, On a new four-dimensional model of memristor-based chaotic circuit in the context of nonsingular Atangana-Baleanu-Caputo operators, Adv. Differ. Equ., 2021 (2021), 444. https://doi.org/10.1186/s13662-021-03600-9 doi: 10.1186/s13662-021-03600-9
|
| [32] |
N. D. Phuong, F. M. Sakar, S. Etemad, S. Rezapour, A novel fractional structure of a multi-order quantum multi-integro-differential problem, Adv. Differ. Equ., 2020 (2020), 633. https://doi.org/10.1186/s13662-020-03092-z doi: 10.1186/s13662-020-03092-z
|
| [33] |
A. Amara, S. Etemad, S. Rezapour, Approximate solutions for a fractional hybrid initial value problem via the Caputo conformable derivative, Adv. Differ. Equ., 2020 (2020), 608. https://doi.org/10.1186/s13662-020-03072-3 doi: 10.1186/s13662-020-03072-3
|
| [34] |
H. Najafi, S. Etemad, N. Patanarapeelert, J. K. K. Asamoah, S. Rezapour, T. Sitthiwirattham, A study on dynamics of CD4+ T-cells under the effect of HIV-1 infection based on a mathematical fractal-fractional model via the Adams-Bashforth scheme and Newton polynomials, Mathematics, 10 (2022), 1366. https://doi.org/10.3390/math10091366 doi: 10.3390/math10091366
|
| [35] |
H. L. Li, L. Zhang, C. Hu, Y. L. Jiang, Z. Teng, Dynamical analysis of a fractional-order predator-prey model incorporating a prey refuge, J. Appl. Math. Comput., 54 (2017), 435–449. https://doi.org/10.1007/s12190-016-1017-8 doi: 10.1007/s12190-016-1017-8
|
| [36] |
H. Wang, Y. Yu, G. Wen, Dynamical analysis of the Lorenz-84 atmospheric circulation model, J. Appl. Math., 2014 (2014), 296279. https://doi.org/10.1155/2014/296279 doi: 10.1155/2014/296279
|
| [37] | A. T. Azar, S. Vaidyanathan, Chaos modeling and control systems design, Vol. 581, Springer International Publishing, Springer Cham, 2015. https://doi.org/10.1007/978-3-319-13132-0 |
| [38] |
M. F. Danca, Lyapunov exponents of a discontinuous 4D hyperchaotic system of integer or fractional order, Entropy, 20 (2018), 337. https://doi.org/10.3390/e20050337 doi: 10.3390/e20050337
|
| [39] |
Z. Liu, J. Li, X. Di, A new hyperchaotic 4D-FDHNN system with four positive lyapunov exponents and its application in image encryption, Entropy, 24 (2022), 900. https://doi.org/10.3390/e24070900 doi: 10.3390/e24070900
|
| [40] | G. P. Williams, Chaos theory tamed, 1 Ed., CRC Press, 1997. https://doi.org/10.1201/9781482295412 |
| [41] | K. Diethelm, An algorithm for the numerical solution of differential equations of fractional order systems, Electron. Trans. Numer. Anal., 5 (1997), 1–6. |
| [42] |
N. Sene, Introduction to the fractional-order chaotic system under fractional operator in Caputo sense, Alexandria Eng. J., 60 (2021), 3997–4014. https://doi.org/10.1016/j.aej.2021.02.056 doi: 10.1016/j.aej.2021.02.056
|
| [43] |
K. Deng, C. Azorin-Molina, S. Yang, C. Hu, G. Zhang, L. Minola, et al., Changes of southern hemisphere westerlies in the future warming climate, Atmos. Res., 270 (2022), 106040. https://doi.org/10.1016/j.atmosres.2022.106040 doi: 10.1016/j.atmosres.2022.106040
|

Figures(11) / Tables(2)

Asharani J. Rangappa, Chandrali Baishya, Reny George, Sina Etemad, Zaher Mundher Yaseen. On the existence, stability and chaos analysis of a novel 4D atmospheric dynamical system in the context of the Caputo fractional derivatives[J]. AIMS Mathematics, 2024, 9(10): 28560-28588. doi: 10.3934/math.20241386







 DownLoad:
DownLoad: