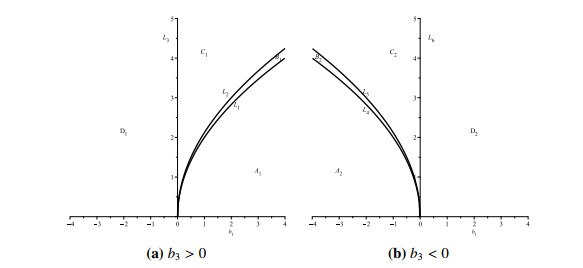
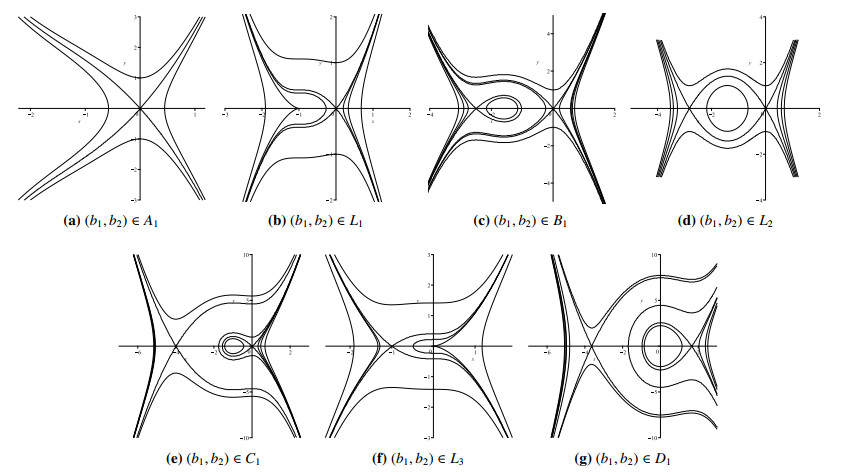
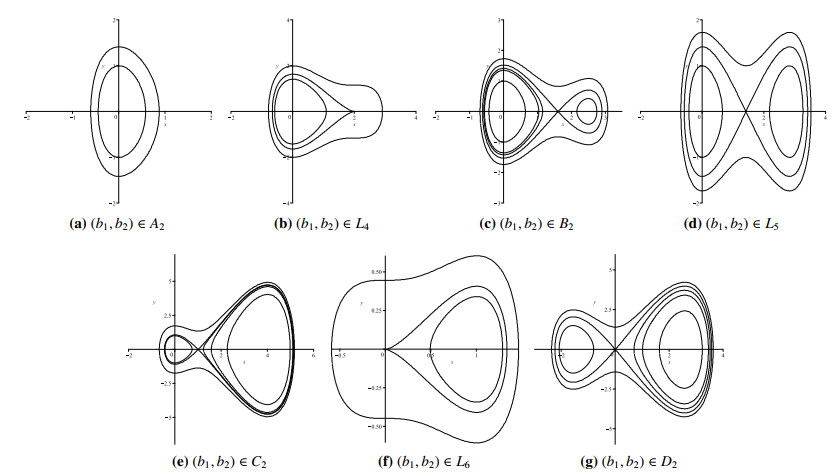
In this paper, the bifurcation theory of planar dynamical systems is employed to investigate the mixed Korteweg-de Vries (KdV) equation. Under different parameter conditions, the bifurcation curves and phase portraits of corresponding Hamiltonian system are given. Furthermore, many different types of exact traveling waves are obtained, which include hyperbolic function solution, triangular function solution, rational solution and doubly periodic solutions in terms of the Jacobian elliptic functions. Furthermore, as all parameters in the representations of exact solutions are free variables, the solutions obtained show more complex dynamical behaviors, and could be applicable to explain diversity in qualitative features of wave phenomena.
Citation: Hui Wang, Xue Wang. Bifurcations of traveling wave solutions for the mixed Korteweg-de Vries equation[J]. AIMS Mathematics, 2024, 9(1): 1652-1663. doi: 10.3934/math.2024081
In this paper, the bifurcation theory of planar dynamical systems is employed to investigate the mixed Korteweg-de Vries (KdV) equation. Under different parameter conditions, the bifurcation curves and phase portraits of corresponding Hamiltonian system are given. Furthermore, many different types of exact traveling waves are obtained, which include hyperbolic function solution, triangular function solution, rational solution and doubly periodic solutions in terms of the Jacobian elliptic functions. Furthermore, as all parameters in the representations of exact solutions are free variables, the solutions obtained show more complex dynamical behaviors, and could be applicable to explain diversity in qualitative features of wave phenomena.

| [1] |
G. Q. Chen, M. Feldman, Multidimensional transonic shock waves and free boundary problems, Bull. Math. Sci., 12 (2021), 2230002. http://dx.doi.org/10.48550/arXiv.2109.10242 doi: 10.48550/arXiv.2109.10242

|
| [2] |
Q. Geng, J. Wang, J. Yang, Existence of multiple nontrivial solutions of the nonlinear Schrödinger-Korteweg-de Vries type system, Adv. Nonlinear Anal., 11 (2021), 636–654. http://dx.doi.org/10.1515/anona-2021-0214 doi: 10.1515/anona-2021-0214
|
| [3] |
B. Moon, Single peaked traveling wave solutions to a generalized $\mu$-Novikov equation, Adv. Nonlinear Anal., 10 (2020), 66–75. http://dx.doi.org/10.1515/anona-2020-0106 doi: 10.1515/anona-2020-0106
|
| [4] |
H. Flaschka, On the Toda lattice Ⅱ: Inverse-scattering solutions, Prog. Theor. Phys., 51 (1974), 703–716. http://dx.doi.org/10.1143/PTP.51.703 doi: 10.1143/PTP.51.703
|
| [5] | V. B. Matveev, M. A. Salle, Darboux transformations and solitons, Berlin: Springer, 1991. |
| [6] |
H. Wang, Y. C. Fu, Exact traveling wave solutions for the (2+1)-dimensional double sine-Gordon equation using direct integral method, Appl. Math. Lett., 146 (2023), 108798. http://dx.doi.org/10.1016/j.aml.2023.108798 doi: 10.1016/j.aml.2023.108798
|
| [7] |
X. G. Geng, H. Wang, Algebro-geometric constructions of quasi-periodic flows of the Newell hierarchy and applications, IMA J. Appl. Math., 82 (2017), 97–130. http://dx.doi.org/10.1093/imamat/hxw008 doi: 10.1093/imamat/hxw008
|
| [8] |
H. Wang, Exact traveling wave solutions of the generalized fifth-order dispersive equation by the improved Fan sub-equation method, Math. Method. Appl. Sci., 2023, 1–10. http://dx.doi.org/10.1002/mma.9717 doi: 10.1002/mma.9717
|
| [9] |
A. M. Wazwaz, Multiple soliton solutions and other exact solutions for a two-mode KdV equation, Math. Method. Appl. Sci., 40 (2016), 2277–2283. http://dx.doi.org/10.1002/mma.4138 doi: 10.1002/mma.4138
|
| [10] |
S. Y. Lou, Q. X. Wu, Painlevé integrability of two sets of nonlinear evolution equations with nonlinear dispersions, Phys. Lett. A, 262 (1999), 344–349. http://dx.doi.org/10.1016/S0375-9601(99)00580-0 doi: 10.1016/S0375-9601(99)00580-0
|
| [11] |
D. H. Feng, G. X. Luo, The improved Fan sub-equation method and its application to the SK equation, Appl. Math. Comput., 215 (2009), 1949–1967. http://dx.doi.org/10.1016/j.amc.2009.07.045 doi: 10.1016/j.amc.2009.07.045
|
| [12] |
T. Suebcharoen, K. Poochinapan, B. Wongsaijai, Bifurcation analysis and numerical study of wave solution for Initial-Boundary value problem of the KdV-BBM equation, Mathematics, 10 (2022), 3825. https://doi.org/10.3390/math10203825 doi: 10.3390/math10203825
|
| [13] | S. S. Liu, S. D. Liu, Nonlinear equations in physics, Beijing: Peking University Press, 2012. |
| [14] |
Z. Zhang, Q. Bi, Bifurcations of traveling wave solutions in a compound KdV-type equation, Chaos Soliton. Fract., 23 (2005), 1185–1194. http://dx.doi.org/10.1016/j.chaos.2004.06.013 doi: 10.1016/j.chaos.2004.06.013
|
| [15] |
A. Khan, S. Saifullah, S. Ahmad, J. Khan, D. Baleanu, Multiple bifurcation solitons, lumps and rogue waves solutions of a generalized perturbed KdV equation, Nonlinear Dyn., 111 (2023), 5743–5756. https://doi.org/10.1007/s11071-022-08137-4 doi: 10.1007/s11071-022-08137-4
|
| [16] |
Y. Chen, S. Li, New traveling wave solutions and interesting bifurcation phenomena of generalized KdV-mKdV-Like equation, Adv. Math. Phys., 2021 (2021), 4213939. https://doi.org/10.1155/2021/4213939 doi: 10.1155/2021/4213939
|
| [17] | H. A. Ghany, Exact solutions for stochastic generalized Hirota-Satsuma coupled KdV equations, Chin. J. Phys., 49 (2011), 926–940. |
| [18] |
H. A. Ghany, A. A. Hyder, Abundant solutions of Wick-type stochastic fractional 2D KdV equations, Chin. Phys. B, 23 (2014), 060503. http://dx.doi.org/10.1088/1674-1056/23/6/060503 doi: 10.1088/1674-1056/23/6/060503
|
| [19] |
H. A. Ghany, Analytical approach to exact solutions for the Wick-type stochastic space-time fractional KdV equation, Chin. Phys. Lett., 31 (2014), 060503. http://dx.doi.org/10.1088/0256-307X/31/6/060503 doi: 10.1088/0256-307X/31/6/060503
|
| [20] | P. F. Byrd, M. D. Friedman, Handbook of elliptic integrals for engineers and physicists, Berlin: Springer-Verlag, 1954. |
| [21] | J. Guckenheimer, P. Holmes, Nonlinear oscillations, dynamical systems and bifurcations of vector fields, New York: Springer-Verlag, 1983. |
| [22] | P. Lawrence, Differential equations and dynamical systems, New York: Springer-Verlag, 1991. |
Figures(3)

Hui Wang, Xue Wang. Bifurcations of traveling wave solutions for the mixed Korteweg-de Vries equation[J]. AIMS Mathematics, 2024, 9(1): 1652-1663. doi: 10.3934/math.2024081







 DownLoad:
DownLoad: