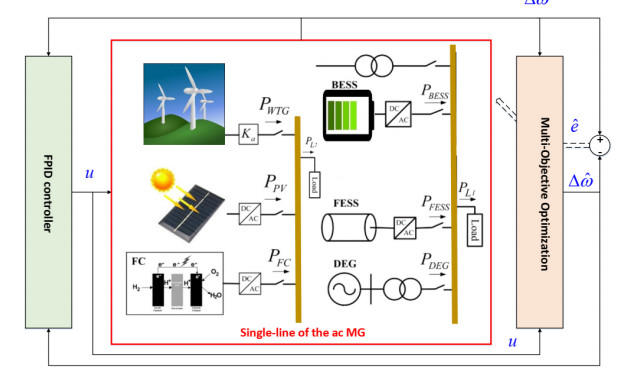
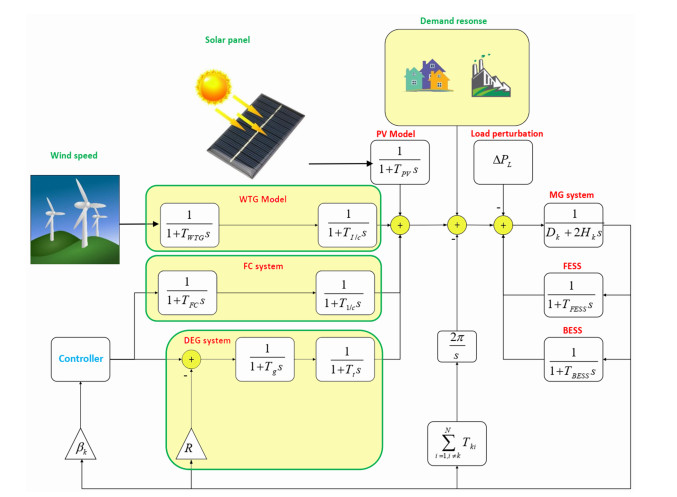
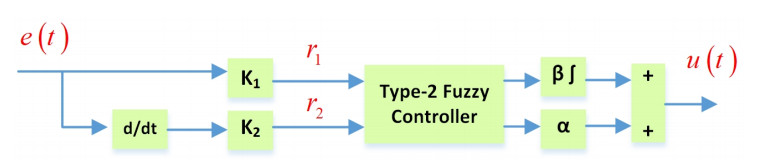
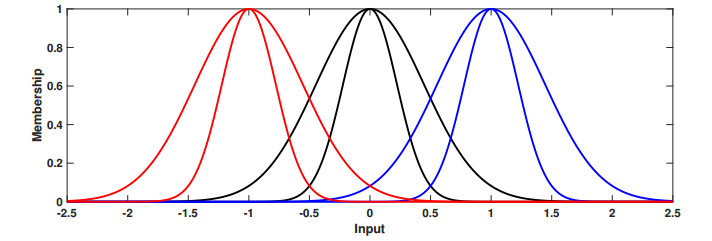
The PID controller is a popular controller that is widely used in various industrial applications. On the other hand, the control problems in microgrids (MGs) are so challenging, because of natural disturbances such as wind speed changes, load variation, and changes in other sources. This paper proposes an input-output scaling factor tuning of interval type-2 fuzzy (IT2F) PID controller using a multi-objective optimization technique. The suggested controller is applied to an MG frequency regulation problem. In the introduced controller the effect of variations of renewable energies (REs) and other disturbances are taken into account, and the robustness is investigated. In the multi-objective scheme, some factors such as least overshoot, and minimum settling/rising time are considered. The simulations show that by considering the suitable adjustment the desired regulation accuracy is achieved, such that the frequency trajectory shows the desired overshoot, and settling/rising time.
Citation: Kamran Sabahi, Chunwei Zhang, Nasreen Kausar, Ardashir Mohammadzadeh, Dragan Pamucar, Amir H. Mosavi. Input-output scaling factors tuning of type-2 fuzzy PID controller using multi-objective optimization technique[J]. AIMS Mathematics, 2023, 8(4): 7917-7932. doi: 10.3934/math.2023399
The PID controller is a popular controller that is widely used in various industrial applications. On the other hand, the control problems in microgrids (MGs) are so challenging, because of natural disturbances such as wind speed changes, load variation, and changes in other sources. This paper proposes an input-output scaling factor tuning of interval type-2 fuzzy (IT2F) PID controller using a multi-objective optimization technique. The suggested controller is applied to an MG frequency regulation problem. In the introduced controller the effect of variations of renewable energies (REs) and other disturbances are taken into account, and the robustness is investigated. In the multi-objective scheme, some factors such as least overshoot, and minimum settling/rising time are considered. The simulations show that by considering the suitable adjustment the desired regulation accuracy is achieved, such that the frequency trajectory shows the desired overshoot, and settling/rising time.

| [1] | N. Cherrat, H. Boubertakh, H. Arioui, Adaptive fuzzy PID control for a class of uncertain mimo nonlinear systems with dead-zone inputs' nonlinearities, IJST-T. Electr. Eng., 42 (2018), 21–39. |
| [2] |
Y. Arya, Agc of two-area electric power systems using optimized fuzzy pid with filter plus double integral controller, J. Franklin I., 355 (2018), 4583–4617. https://doi.org/10.1016/j.jfranklin.2018.05.001 doi: 10.1016/j.jfranklin.2018.05.001

|
| [3] |
K. Deb, A. Pratap, S. Agarwal, T. Meyarivan, A fast and elitist multiobjective genetic algorithm: Nsga-Ⅱ, IEEE T. Evolut. Comput., 6 (2002), 182–197. https://doi.org/10.1109/4235.996017 doi: 10.1109/4235.996017
|
| [4] |
M. K. Debnath, T. Jena, S. K. Sanyal, Frequency control analysis with PID-fuzzy-PID hybrid controller tuned by modified gwo technique, Int. T. Electr. Energy, 29 (2019), e12074. https://doi.org/10.1002/2050-7038.12074 doi: 10.1002/2050-7038.12074
|
| [5] |
M. El-Bardini, A. M. El-Nagar, Interval type-2 fuzzy PID controller for uncertain nonlinear inverted pendulum system, ISA T., 53 (2014), 732–743. https://doi.org/10.1016/j.isatra.2014.02.007 doi: 10.1016/j.isatra.2014.02.007
|
| [6] |
R. M. Elavarasan, The motivation for renewable energy and its comparison with other energy sources: A review, Eur. J. Sustain. Dev., 3 (2019), em0076. https://doi.org/10.20897/ejosdr/4005 doi: 10.20897/ejosdr/4005
|
| [7] | A. P. Engelbrecht, Computational intelligence: An introduction, John Wiley & Sons, 2007. |
| [8] |
B. Firouzi, K. A. Alattas, M. Bakouri, A. K. Alanazi, A. Mohammadzadeh, S. Mobayen, et al., A type-2 fuzzy controller for floating tension-leg platforms in wind turbines, Energies, 15 (2022), 1705. https://doi.org/10.3390/en15051705 doi: 10.3390/en15051705
|
| [9] |
M. Gheisarnejad, An effective hybrid harmony search and cuckoo optimization algorithm based fuzzy PID controller for load frequency control, Appl. Soft Comput., 65 (2018), 121–138. https://doi.org/10.1016/j.asoc.2018.01.007 doi: 10.1016/j.asoc.2018.01.007
|
| [10] |
A. H. G. Haroun, Y. Li, A novel optimized hybrid fuzzy logic intelligent PID controller for an interconnected multi-area power system with physical constraints and boiler dynamics, ISA T., 71 (2017), 364–379. https://doi.org/10.1016/j.isatra.2017.09.003 doi: 10.1016/j.isatra.2017.09.003
|
| [11] |
S. Jiang, S. Yang, A strength pareto evolutionary algorithm based on reference direction for multiobjective and many-objective optimization, IEEE T. Evolut. Comput., 21 (2017), 329–346. https://doi.org/10.1109/TEVC.2016.2592479 doi: 10.1109/TEVC.2016.2592479
|
| [12] |
B. Jimada-Ojuolape, J. Teh, Surveys on the reliability impacts of power system cyber-physical layers, Sustain. Cities Soc., 62 (2020), 102384. https://doi.org/10.1016/j.scs.2020.102384 doi: 10.1016/j.scs.2020.102384
|
| [13] | H. Bevrani, Robust power system frequency control, New York, Springer, 4 (2014). |
| [14] |
D. Khamari, R. K. Sahu, S. Panda, A modified moth swarm algorithm-based hybrid fuzzy PD-PI controller for frequency regulation of distributed power generation system with electric vehicle, J. Control Autom. Elec., 31 (2020), 675–692. https://doi.org/10.1007/s40313-020-00565-0 doi: 10.1007/s40313-020-00565-0
|
| [15] |
M. H. Khooban, T. Niknam, A new intelligent online fuzzy tuning approach for multi-area load frequency control: Self adaptive modified bat algorithm, Int. J. Elec. Power, 71 (2015), 254–261. https://doi.org/10.1016/j.ijepes.2015.03.017 doi: 10.1016/j.ijepes.2015.03.017
|
| [16] |
A. Kumar, V. Kumar, Evolving an interval type-2 fuzzy pid controller for the redundant robotic manipulator, Expert Syst. Appl., 73 (2017), 161–177. https://doi.org/10.1016/j.eswa.2016.12.029 doi: 10.1016/j.eswa.2016.12.029
|
| [17] | M. Mahfouf, M. Y. Chen, D. A. Linkens, Adaptive weighted particle swarm optimisation for multi-objective optimal design of alloy steels, In: International conference on parallel problem solving from nature, Springer, 2004,762–771. |
| [18] |
A. Nickabadi, M. M. Ebadzadeh, R. Safabakhsh, A novel particle swarm optimization algorithm with adaptive inertia weight, Appl. Soft Comput., 11 (2011), 3658–3670. https://doi.org/10.1016/j.asoc.2011.01.037 doi: 10.1016/j.asoc.2011.01.037
|
| [19] | J. Horn, N. Nafpliotis, D. E. Goldberg, Multiobjective optimization using the niched pareto genetic algorithm, IlliGAL Report, 93005 (1993), 61801–2296. |
| [20] |
K. Sabahi, S. Ghaemi, S. Pezeshki, Gain scheduling technique using mimo type-2 fuzzy logic system for lfc in restructure power system, Int. J. Fuzzy Syst., 19 (2017), 1464–1478. https://doi.org/10.1007/s40815-016-0240-7 doi: 10.1007/s40815-016-0240-7
|
| [21] |
K. Sabahi, M. Tavan, A. Hajizadeh, Adaptive type-2 fuzzy pid controller for lfc in ac microgrid, Soft Comput., 25 (2021), 7423–7434. https://doi.org/10.1007/s00500-021-05704-6 doi: 10.1007/s00500-021-05704-6
|
| [22] |
B. K. Sahu, S. Pati, P. K. Mohanty, S. Panda, Teaching-learning based optimization algorithm based fuzzy-pid controller for automatic generation control of multi-area power system, Appl. Soft Comput., 27 (2015), 240–249. https://doi.org/10.1016/j.asoc.2014.11.027 doi: 10.1016/j.asoc.2014.11.027
|
| [23] |
J. Z. Shi, A fractional order general type-2 fuzzy pid controller design algorithm, IEEE Access, 8 (2020), 52151–52172. https://doi.org/10.1109/ACCESS.2020.2980686 doi: 10.1109/ACCESS.2020.2980686
|
| [24] | V. Tongur, E. Üker, B-spline curve knot estimation by using niched pareto genetic algorithm (npga), Intelligent and evolutionary systems, Springer, 2016,305–316. |
| [25] |
E. Yesil, Interval type-2 fuzzy pid load frequency controller using big bang-big crunch optimization, Appl. Soft Comput., 15 (2014), 100–112. https://doi.org/10.1016/j.asoc.2013.10.031 doi: 10.1016/j.asoc.2013.10.031
|
| [26] | E. Yeşil, M. Güzelkaya, İ. Eksin, Self tuning fuzzy pid type load and frequency controller, Energ. Convers. Manage., 45 (2004), 377–390. |
| [27] |
J. Ziegler, N. Nichols, Optimum settings for automatic controllers, J. Dyn. Syst. Meas. Control, 115 (1993). https://doi.org/10.1115/1.2899060 doi: 10.1115/1.2899060
|
| [28] |
A. D. Shakibjoo, M. Moradzadeh, S. U. Din, A. Mohammadzadeh, A. H. Mosavi, L. Vandevelde, Optimized type-2 fuzzy frequency control for multi-area power systems, IEEE Access, 10 (2021), 6989–7002. https://doi.org/10.1109/ACCESS.2021.3139259 doi: 10.1109/ACCESS.2021.3139259
|
| [29] |
A. Mohammadzadeh, M. H. Sabzalian, A. Ahmadian, N. Nabipour, A dynamic general type-2 fuzzy system with optimized secondary membership for online frequency regulation, ISA T., 112 (2021), 150–160. https://doi.org/10.1016/j.isatra.2020.12.008 doi: 10.1016/j.isatra.2020.12.008
|
| [30] |
D. Li, S. S. Ge, T. H. Lee, Fixed-time-synchronized consensus control of multiagent systems, IEEE T. Control Netw., 8 (2021), 89–98. https://doi.org/10.1109/TCNS.2020.3034523 doi: 10.1109/TCNS.2020.3034523
|
| [31] |
R. Ye, P. Liu, K. Shi, B. Yan, State damping control: A novel simple method of rotor UAV with high performance, IEEE Access, 8 (2020), 214346–214357. https://doi.org/10.1109/ACCESS.2020.3040779 doi: 10.1109/ACCESS.2020.3040779
|
| [32] |
K. Liu, Z. Yang, W. Wei, B. Gao, D. Xin, C. Sun, et al., Novel detection approach for thermal defects: Study on its feasibility and application to vehicle cables, High Volt., 2022, 1–10. https://doi.org/10.1049/hve2.12258 doi: 10.1049/hve2.12258
|
| [33] |
J. Wang, J. Tian, X. Zhang, B. Yang, S. Liu, L. Yin, et al., Control of time delay force feedback teleoperation system with finite time convergence, Front. Neurorobotics, 2022. https://doi.org/10.3389/fnbot.2022.877069 doi: 10.3389/fnbot.2022.877069
|
| [34] |
S. Lu, Y. Ban, X. Zhang, B. Yang, S. Liu, L. Yin, et al., Adaptive control of time delay teleoperation system with uncertain dynamics, Front. Neurorobotics, 2022. https://doi.org/10.3389/fnbot.2022.928863 doi: 10.3389/fnbot.2022.928863
|
| [35] |
X. Qin, Z. Liu, Y. Liu, S. Liu, B. Yang, L. Yin, et al., User OCEAN personality model construction method using a BP neural network, Electronics, 11 (2022), 3022. https://doi.org/10.3390/electronics11193022 doi: 10.3390/electronics11193022
|
| [36] |
H. Zheng, S. Jin, A multi-source fluid queue based stochastic model of the probabilistic offloading strategy in a MEC system with multiple mobile devices and a single MEC server, Int. J. Appl. Math. Comput. Sci., 32 (2022), 125–138. https://doi.org/10.34768/amcs-2022-0010 doi: 10.34768/amcs-2022-0010
|
| [37] |
M. Sharma, S. Dhundhara, Y. Arya, S. Prakash, Frequency excursion mitigation strategy using a novel COA optimised fuzzy controller in wind integrated power systems, IET Renew. Power Gen., 14 (2020), 4071–4085. https://doi.org/10.1049/iet-rpg.2020.0882 doi: 10.1049/iet-rpg.2020.0882
|
| [38] |
Y. Arya, N. Kumar, Fuzzy gain scheduling controllers for automatic generation control of two-area interconnected electrical power systems, Electr. Pow. Compo. Sys., 44 (2016), 737–751. https://doi.org/10.1080/15325008.2015.1131765 doi: 10.1080/15325008.2015.1131765
|
| [39] |
E. Çelik, N. Öztürk, Y. Arya, C. Ocak, (1+PD)-PID cascade controller design for performance betterment of load frequency control in diverse electric power systems, Neural Comput. Appl., 33 (2021), 15433–15456. https://doi.org/10.1080/15325008.2015.1131765 doi: 10.1080/15325008.2015.1131765
|
| [40] |
A. Yogendra, N. Kumar, AGC of a two-area multi-source power system interconnected via AC/DC parallel links under restructured power environment, Optim. Contr. Appl. Met., 37 (2016), 590–607. https://doi.org/10.1002/oca.2181 doi: 10.1002/oca.2181
|
| [41] |
S. Mustafa, A. A. Bajwa, S. Iqbal, A new fuzzy grach model to forecast stock market technical analysis, Oper. Res. Eng. Sci., 5 (2022), 185–204. https://doi.org/10.31181/oresta040422196m doi: 10.31181/oresta040422196m
|
| [42] |
M. Riaz, H. M. A. Farid, Picture fuzzy aggregation approach with application to third-party logistic provider selection process, Rep. Mech. Eng., 3 (2022), 318–327. https://doi.org/10.31181/rme20023062022r doi: 10.31181/rme20023062022r
|
Figures(11) / Tables(1)

Kamran Sabahi, Chunwei Zhang, Nasreen Kausar, Ardashir Mohammadzadeh, Dragan Pamucar, Amir H. Mosavi. Input-output scaling factors tuning of type-2 fuzzy PID controller using multi-objective optimization technique[J]. AIMS Mathematics, 2023, 8(4): 7917-7932. doi: 10.3934/math.2023399







 DownLoad:
DownLoad: