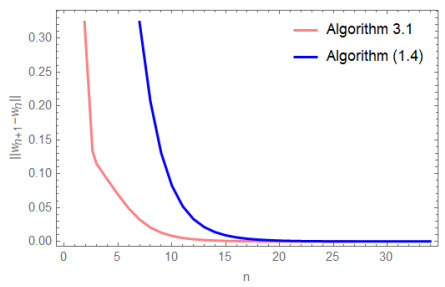
In this paper, a new self-adaptive algorithm with the inertial technique is proposed for solving the split equality problem in $ p $-uniformly convex and uniformly smooth Banach spaces. Under some mild control conditions, a strong convergence theorem for the proposed algorithm is established. Furthermore, the results are applied to split equality fixed point problem and split equality variational inclusion problem. Finally, numerical examples are provided to illustrate the convergence behaviour of the algorithm. The main results in this paper improve and generalize some existing results in the literature.
Citation: Meiying Wang, Luoyi Shi, Cuijuan Guo. An inertial iterative method for solving split equality problem in Banach spaces[J]. AIMS Mathematics, 2022, 7(10): 17628-17646. doi: 10.3934/math.2022971
In this paper, a new self-adaptive algorithm with the inertial technique is proposed for solving the split equality problem in $ p $-uniformly convex and uniformly smooth Banach spaces. Under some mild control conditions, a strong convergence theorem for the proposed algorithm is established. Furthermore, the results are applied to split equality fixed point problem and split equality variational inclusion problem. Finally, numerical examples are provided to illustrate the convergence behaviour of the algorithm. The main results in this paper improve and generalize some existing results in the literature.

| [1] | H. Attouch, J. Bolte, P. Redont, A. Soubeyran, Alternating proximal algorithms for weakly coupled minimization problems. Applications to dynamical games and PDEs, J. Convex Anal., 15 (2008), 485–506. |
| [2] |
C. Byrne, Iterative oblique projection onto convex sets and the split feasibility problem, Inverse Probl., 18 (2002), 441–453. https://doi.org/10.1088/0266-5611/18/2/310 doi: 10.1088/0266-5611/18/2/310

|
| [3] |
C. Byrne, A unified treatment of some iterative algorithms in signal processing and image reconstruction, Inverse Probl., 20 (2004), 103–120. https://doi.org/10.1088/0266-5611/20/1/006 doi: 10.1088/0266-5611/20/1/006
|
| [4] | I. Cioranescu, Geometry of Banach spaces, duality mappings and nonlinear problems, Dordrecht: Springer, 1990. https://doi.org/10.1007/978-94-009-2121-4 |
| [5] |
Y. Censor, T. Elfving, A multiprojection algorithm using Bregman projections in a product space, Numer. Algor., 8 (1994), 221–239. https://doi.org/10.1007/BF02142692 doi: 10.1007/BF02142692
|
| [6] |
Y. Censor, T. Bortfeld, B. Martin, A. Trofimov, A unified approach for inversion problems in intensity-modulated radiation therapy, Phys. Med. Biol., 51 (2006), 2353–2365. https://doi.org/10.1088/0031-9155/51/10/001 doi: 10.1088/0031-9155/51/10/001
|
| [7] |
Y. Censor, A. Segal, The split common fixed point problem for directed operators, J. Convex Anal., 26 (2010), 055007. https://doi.org/10.1088/0266-5611/26/5/055007 doi: 10.1088/0266-5611/26/5/055007
|
| [8] |
S. S. Chang, L. Wang, Y. K. Tang, G. Wang, Moudafi's open question and simultaneous iterative algorithm for general split equality variational inclusion problems and general split equality optimization problems, Fixed Point Theory Appl., 2014 (2014), 215. https://doi.org/10.1186/1687-1812-2014-215 doi: 10.1186/1687-1812-2014-215
|
| [9] |
A. Dixit, D. R. Sahu, P. Gautam, T. Som, J. C. Yao, An accelerated forward-backward splitting algorithm for solving inclusion problems with applications to regression and link prediction problems, J. Nonlinear Var. Anal., 5 (2021), 79–101. https://doi.org/10.23952/jnva.5.2021.1.06 doi: 10.23952/jnva.5.2021.1.06
|
| [10] | Q. L. Dong, Y. Peng, Y. Yao, Alternated inertial projection methods for the split equality problem, J. Nonlinear Convex Anal., 22 (2021), 53–67. |
| [11] | Q. L. Dong, L. Liu, Y. Yao, Self-adaptive projection and contraction methods with alternated inertial terms for solving the split feasibility problem, J. Nonlinear Convex Anal., 23 (2022), 591–605. |
| [12] | K. Goebel, S. Reich, Uniform convexity, hyperbolic geometry, and nonexpansive mappings, New York: Marcel Dekker, 1984. |
| [13] |
L. O. Jolaoso, Y. Shehu, Y. J. Cho, Convergence analysis for variational inequalities and fixed point problems in reflexive Banach spaces, J. Inequal. Appl., 2021 (2021), 44. https://doi.org/10.1186/s13660-021-02570-6 doi: 10.1186/s13660-021-02570-6
|
| [14] | J. Lindenstrauss, L. Tzafriri, Classical Banach spaces Ⅱ, Berlin, Heidelberg: Springer, 1979. |
| [15] |
G. López, V. Martín-Márquez, F. Wang, H. K. Xu, Solving the split feasibility problem without prior knowledge of matrix norms, Inverse Probl., 28 (2012), 085004. https://doi.org/10.1088/0266-5611/28/8/085004 doi: 10.1088/0266-5611/28/8/085004
|
| [16] |
H. Y. Li, Y. L. Wu, F. H. Wang, New inertial relaxed CQ algorithms for solving split feasibility problems in Hilbert spaces, J. Math., 2021 (2021), 6624509. https://doi.org/10.1155/2021/6624509 doi: 10.1155/2021/6624509
|
| [17] |
A. Moudafi, A relaxed alternating CQ-algorithms for convex feasibility problems, Nonlinear Anal. Theor., 79 (2013), 117–121. https://doi.org/10.1016/j.na.2012.11.013 doi: 10.1016/j.na.2012.11.013
|
| [18] | Y. Nesterov, A method for solving the convex programming problem with convergence rate $O(1/k^2)$, Dokl. Akad. Nauk Sssr., 269 (1983), 543–547. |
| [19] |
B. T. Polyak, Some methods of speeding up the convergence of iteration methods, Ussr Comput. Math. Math. Phys., 4 (1964), 1–17. https://doi.org/10.1016/0041-5553(64)90137-5 doi: 10.1016/0041-5553(64)90137-5
|
| [20] |
D. R. Sahu, Y. J. Cho, Q. L. Dong, M. R. Kashyap, X. H. Li, Inertial relaxed CQ algorithms for solving a split feasibility problem in Hilbert spaces, Numer. Algor., 87 (2021), 1075–1095. https://doi.org/10.1007/s11075-020-00999-2 doi: 10.1007/s11075-020-00999-2
|
| [21] |
F. Schöpfer, T. Schuster, A. K. Louis, An iterative regularization method for the solution of the split feasibility problem in Banach spaces, Inverse Probl., 24 (2008), 055008. https://doi.org/10.1088/0266-5611/24/5/055008 doi: 10.1088/0266-5611/24/5/055008
|
| [22] |
F. Schöpfer, T. Schuster, A. K. Louis, Metric and Bregman projections onto affine subspaces and their computation via sequential subspace optimization methods, Journal of Inverse and ILL-Posed Problems, 16 (2008), 479–506. https://doi.org/10.1515/JIIP.2008.026 doi: 10.1515/JIIP.2008.026
|
| [23] |
L. Y. Shi, R. D. Chen, Y. J. Wu, Strong convergence of iterative algorithms for the split equality problem, J. Inequal. Appl., 2014 (2014), 478. https://doi.org/10.1186/1029-242X-2014-478 doi: 10.1186/1029-242X-2014-478
|
| [24] |
Y. Shehu, O. S. Iyiola, C. D. Enyi, An iterative algorithm for solving split feasibility problems and fixed point problems in Banach spaces, Numer. Algor., 72 (2016), 835–864. https://doi.org/10.1007/s11075-015-0069-4 doi: 10.1007/s11075-015-0069-4
|
| [25] |
Y. Shehu, P. T. Vuong, P. Cholamjiak, A self-adaptive projection method with an inertial technique for split feasibility problems in Banach spaces with applications to image restoration problems, J. Fixed Point Theory Appl., 21 (2019), 50. https://doi.org/10.1007/s11784-019-0684-0 doi: 10.1007/s11784-019-0684-0
|
| [26] |
Y. Shehu, O. T. Mewomo, F. U. Ogbuisi, Further investigation into approximation of a common solution of fixed point problems and split feasibility problems, Acta. Math. Sci., 36 (2016), 913–930. https://doi.org/10.1016/S0252-9602(16)30049-2 doi: 10.1016/S0252-9602(16)30049-2
|
| [27] |
D. Tian, L. Jiang, Two-step methods and relaxed two-step methods for solving the split equality problem, Comput. Appl. Math., 40 (2021), 83. https://doi.org/10.1007/s40314-021-01465-y doi: 10.1007/s40314-021-01465-y
|
| [28] | W. Takahashi, Nonlinear functional analysis: fixed point theory and its application, Yokohama: Yokohama Publishers, 2000. |
| [29] |
P. T. Vuong, J. J. Strodiot, V. H. Nguyen, A gradient projection method for solving split equality and split feasibility problems in Hilbert spaces, Optimization, 64 (2015), 2321–2341. https://doi.org/10.1080/02331934.2014.967237 doi: 10.1080/02331934.2014.967237
|
| [30] |
F. Wang, A new algorithm for solving the multiple-sets split feasibility problem in Banach spaces, Numer. Funct. Anal. Optim., 35 (2014), 99–110. https://doi.org/10.1080/01630563.2013.809360 doi: 10.1080/01630563.2013.809360
|
| [31] |
T. X. Xu, L. Y. Shi, Multiple-sets split feasibility problem and split equality fixed point problem for firmly quasi-nonexpansive or nonexpansive mappings, J. Inequal. Appl., 2021 (2021), 120. https://doi.org/10.1186/s13660-021-02656-1 doi: 10.1186/s13660-021-02656-1
|
| [32] |
H. K. Xu, Inequalities in Banach spaces with applications, Nonlinear Anal. Theor., 16 (1991), 1127–1138. https://doi.org/10.1016/0362-546X(91)90200-K doi: 10.1016/0362-546X(91)90200-K
|
| [33] |
Z. Zhou, B. Tan, S. X. Li, An inertial shrinking projection algorithm for split common fixed point problems, J. Appl. Anal. Comput., 10 (2020), 2104–2120. https://doi.org/10.11948/20190330 doi: 10.11948/20190330
|
| [34] |
J. Zhao, Y. Li, A new inertial self-adaptive algorithm for split common fixed point problems, J. Nonlinear Var. Anal., 5 (2021), 43–57. https://doi.org/10.23952/jnva.5.2021.1.04 doi: 10.23952/jnva.5.2021.1.04
|







Figures(8) / Tables(2)

Meiying Wang, Luoyi Shi, Cuijuan Guo. An inertial iterative method for solving split equality problem in Banach spaces[J]. AIMS Mathematics, 2022, 7(10): 17628-17646. doi: 10.3934/math.2022971







 DownLoad:
DownLoad: