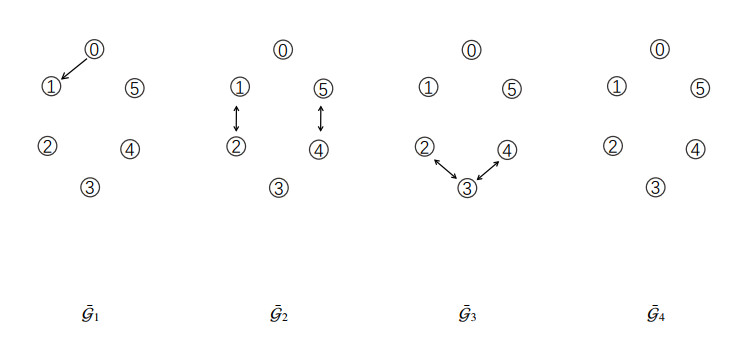
The synchronization problem for heterogeneous harmonic oscillators is investigated. In practice, the communication network among oscillators might suffer from equipment failures or malicious attacks. The connection may switch extremely frequently without dwell time, and can thus be described by generalized uniformly jointly connected networks. We show that the presented typical control law is strongly robust against various unreliable communications. Combined with the virtual output approach and generalized Krasovskii-LaSalle theorem, the stability is proved with the help of its cascaded structure. Numerical examples are presented to show the correctness of the control law.
Citation: Xiaofeng Chen. Synchronization of heterogeneous harmonic oscillators for generalized uniformly jointly connected networks[J]. Electronic Research Archive, 2023, 31(8): 5039-5055. doi: 10.3934/era.2023258
The synchronization problem for heterogeneous harmonic oscillators is investigated. In practice, the communication network among oscillators might suffer from equipment failures or malicious attacks. The connection may switch extremely frequently without dwell time, and can thus be described by generalized uniformly jointly connected networks. We show that the presented typical control law is strongly robust against various unreliable communications. Combined with the virtual output approach and generalized Krasovskii-LaSalle theorem, the stability is proved with the help of its cascaded structure. Numerical examples are presented to show the correctness of the control law.

| [1] |
I. Z. Awan, F. Tahir, M. Rehan, K. Hong, Observer-based event-triggered leader-following consensus of multi-agents with generalized lipschitz nonlinear dynamics, ISA. Trans., 137 (2023), 98–110. https://doi.org/10.1016/j.isatra.2023.02.003 doi: 10.1016/j.isatra.2023.02.003

|
| [2] |
W. Li, K. Qin, G. Li, M. Shi, X. Zhang, Robust bipartite tracking consensus of multi-agent systems via neural network combined with extended high-gain observer, ISA. Trans., 136 (2023), 31–45. https://doi.org/10.1016/j.isatra.2022.10.015 doi: 10.1016/j.isatra.2022.10.015
|
| [3] |
Y. Li, J. Feng, J. Wang, Mean square synchronization for stochastic delayed neural networks via pinning impulsive control, Electron. Res. Arch., 30 (2022), 3172–3192. https://doi.org/10.3934/era.2022161 doi: 10.3934/era.2022161
|
| [4] |
G. Xiao, J. Wang, D. Shen, Adaptive fixed-time consensus for stochastic multi-agent systems with uncertain actuator faults, ISA. Trans., 137 (2023), 369–378. https://doi.org/10.1016/j.isatra.2023.01.003 doi: 10.1016/j.isatra.2023.01.003
|
| [5] |
H. Xiong, C. Yang, W. Li, Fixed-time synchronization problem of coupled delayed discontinuous neural networks via indefinite derivative method, Electron. Res. Arch., 31 (2023), 1625–1640. https://doi.org/10.3934/era.2023084 doi: 10.3934/era.2023084
|
| [6] |
S. Yu-Jing, M. Yan, Finite/fixed-time synchronization for complex networks via quantized adaptive control, Electron. Res. Arch., 29 (2021), 2047–2061. https://doi.org/10.3934/era.2020104 doi: 10.3934/era.2020104
|
| [7] |
H. Zamani, K. Khandani, V. J. Majd, Fixed-time sliding-mode distributed consensus and formation control of disturbed fractional-order multi-agent systems, ISA. Trans., 138 (2023), 37–48. https://doi.org/10.1016/j.isatra.2023.03.010 doi: 10.1016/j.isatra.2023.03.010
|
| [8] |
W. Cang, Z. Li, H. Wang, Observer-based consensus of networked thrust-propelled vehicles with directed graphs, ISA. Trans., 71 (2017), 130–137. https://doi.org/10.1016/j.isatra.2017.03.026 doi: 10.1016/j.isatra.2017.03.026
|
| [9] |
W. Ren, Synchronization of coupled harmonic oscillators with local interaction, Automatica, 44 (2008), 3195–3200. https://doi.org/10.1016/j.automatica.2008.05.027 doi: 10.1016/j.automatica.2008.05.027
|
| [10] |
L. I. Allerhand, U. Shaked, Robust stability and stabilization of linear switched systems with dwell time, IEEE. Trans. Autom. Control, 56 (2010), 381–386. https://doi.org/10.1109/TAC.2010.2097351 doi: 10.1109/TAC.2010.2097351
|
| [11] |
J. Fu, Y. Lv, T. Huang, Distributed anti-windup approach for consensus tracking of second-order multi-agent systems with input saturation, Syst. Control Lett., 130 (2019), 1–6. https://doi.org/10.1016/j.sysconle.2019.06.002 doi: 10.1016/j.sysconle.2019.06.002
|
| [12] |
X. Meng, B. Jiang, H. R. Karimi, C. Gao, An event-triggered mechanism to observer-based sliding mode control of fractional-order uncertain switched systems, ISA. Trans., 135 (2023), 115–129. https://doi.org/10.1016/j.isatra.2022.10.011 doi: 10.1016/j.isatra.2022.10.011
|
| [13] |
C. Wang, Z. Zhou, X. Dai, X. Liu, Iterative learning approach for consensus tracking of partial difference multi-agent systems with control delay under switching topology, ISA. Trans., 136 (2023), 46–60. https://doi.org/10.1016/j.isatra.2022.10.038 doi: 10.1016/j.isatra.2022.10.038
|
| [14] |
T. Lee, Y. Tan, Y. Su, I. Mareels, Invariance principles and observability in switched systems with an application in consensus, IEEE. Trans. Autom. Control, 66 (2021), 5128–5143. https://doi.org/10.1109/TAC.2020.3035594 doi: 10.1109/TAC.2020.3035594
|
| [15] |
T. Liu, Z. Jiang, Distributed nonlinear control of mobile autonomous multi-agents, Automatica, 50 (2014), 1075–1086. https://doi.org/10.1016/j.automatica.2014.02.023 doi: 10.1016/j.automatica.2014.02.023
|
| [16] |
Y. Su, J. Huang, Stability of a class of linear switching systems with applications to two consensus problems, IEEE. Trans. Autom. Control, 57 (2012), 1420–1430. https://doi.org/10.1109/TAC.2011.2176391 doi: 10.1109/TAC.2011.2176391
|
| [17] |
A. Jadbabaie, J. Lin, A. Morse, Coordination of groups of mobile autonomous agents using nearest neighbor rules, IEEE. Trans. Autom. Control, 48 (2003), 988–1001. https://doi.org/10.1109/TAC.2003.812781 doi: 10.1109/TAC.2003.812781
|
| [18] |
H. Su, X. Wang, Z. Lin, Synchronization of coupled harmonic oscillators in a dynamic proximity network, Automatica, 45 (2009), 2286–2291. https://doi.org/10.1016/j.automatica.2009.05.026 doi: 10.1016/j.automatica.2009.05.026
|
| [19] |
S. E. Tuna, Synchronization of harmonic oscillators under restorative coupling with applications in electrical networks, Automatica, 75 (2017), 236–243. https://doi.org/10.1016/j.automatica.2016.09.035 doi: 10.1016/j.automatica.2016.09.035
|
| [20] |
S. Shi, Z. Wang, Q. Song, M. Xiao, G. Jiang, Leader-following quasi-bipartite synchronization of coupled heterogeneous harmonic oscillators via event-triggered control, Appl. Math. Comput., 427 (2022), 127172. https://doi.org/10.1016/j.amc.2022.127172 doi: 10.1016/j.amc.2022.127172
|
| [21] |
Z. Wang, H. He, G. Jiang, J. Cao, Distributed tracking in heterogeneous networks with asynchronous sampled-data control, IEEE. Trans. Ind. Inf., 16 (2020), 7381–7391. https://doi.org/10.1109/TII.2019.2958652 doi: 10.1109/TII.2019.2958652
|
| [22] |
Y. Mao, E. Akyol, Synchronization of coupled harmonic oscillators by time-dependent topology switching, IFAC-PapersOnLine, 51 (2018), 402–407. https://doi.org/10.1016/j.ifacol.2018.12.069 doi: 10.1016/j.ifacol.2018.12.069
|
| [23] |
Y. Su, T. Lee, Output feedback synthesis of multiagent systems with jointly connected switching networks: A separation principle approach, IEEE. Trans. Autom. Control, 67 (2022), 941–948. https://doi.org/10.1109/TAC.2021.3077352 doi: 10.1109/TAC.2021.3077352
|
| [24] | A. S. Morse, Control using logic-based switching in Trends in Control, A European Perspective, in Trends in Control, (1995), 69–113. https://doi.org/10.1007/978-1-4471-3061-1_4 |
| [25] |
Y. Su, J. Huang, Cooperative output regulation with application to multi-agent consensus under switching network, IEEE. Trans. Syst. Man Cybern., 42 (2012), 864–875. https://doi.org/10.1109/TSMCB.2011.2179981 doi: 10.1109/TSMCB.2011.2179981
|
Figures(7)
Xiaofeng Chen. Synchronization of heterogeneous harmonic oscillators for generalized uniformly jointly connected networks[J]. Electronic Research Archive, 2023, 31(8): 5039-5055. doi: 10.3934/era.2023258







 DownLoad:
DownLoad: