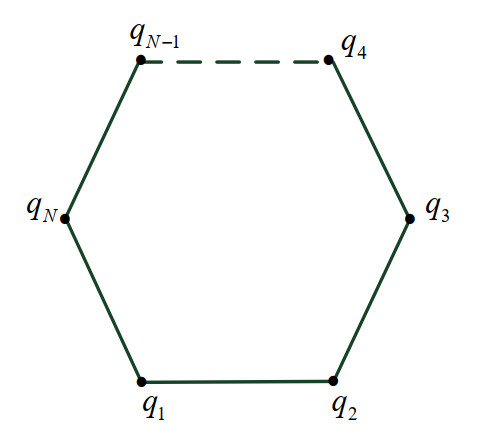
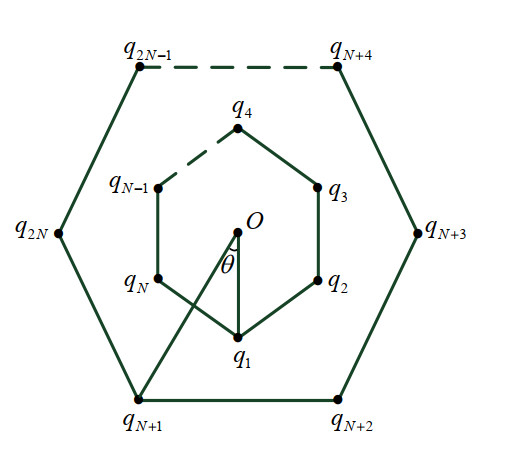
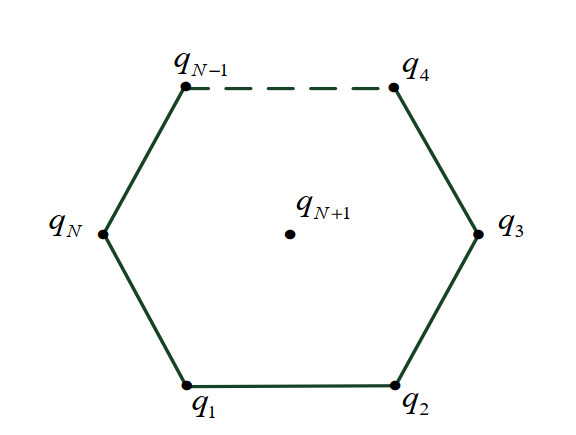
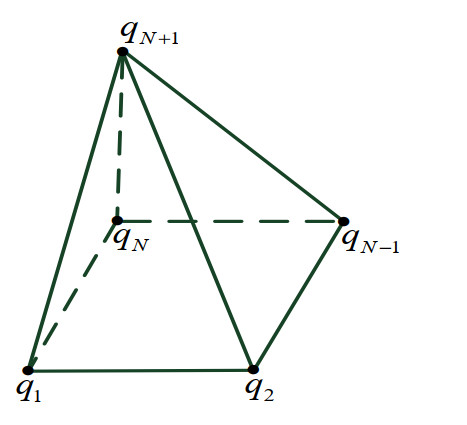
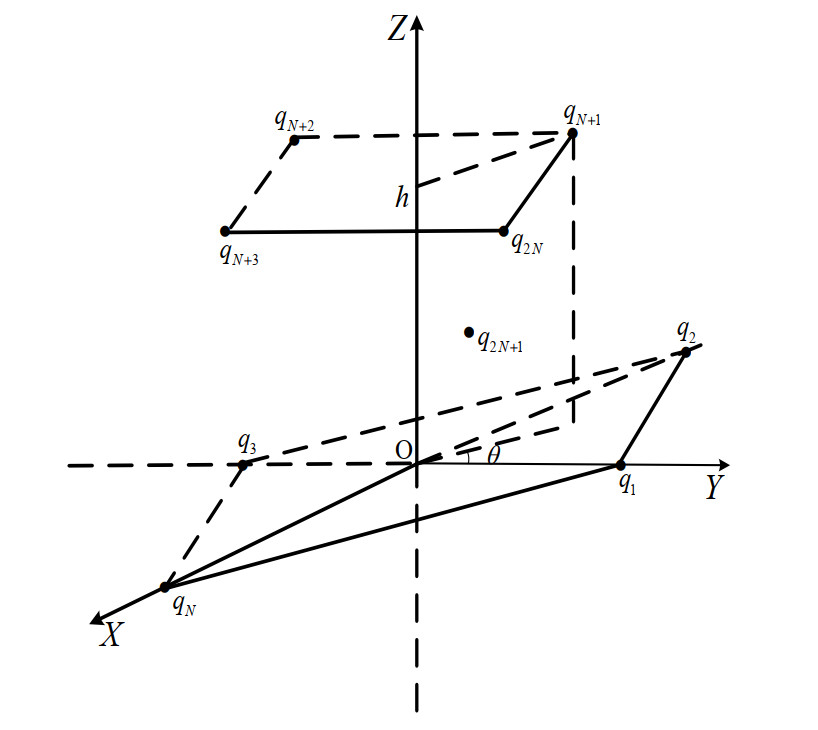
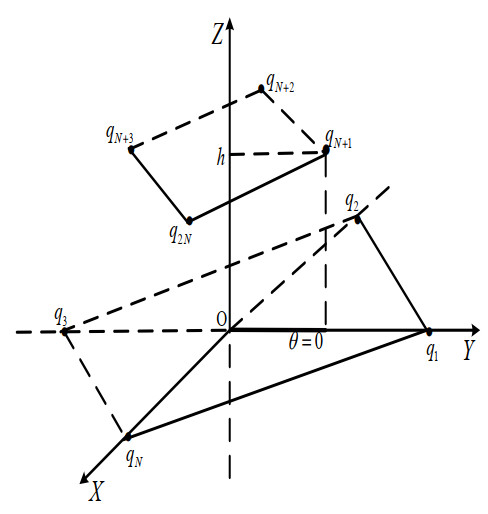
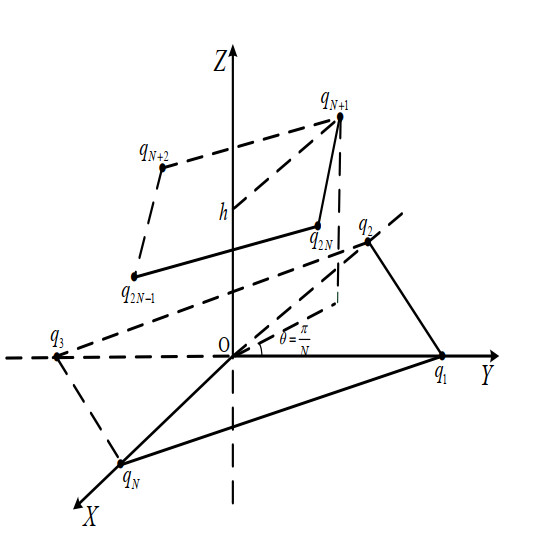
For a spatial twisted central configuration of the Newtonian ($ 2N $+1)-body problem where $ 2N $ masses are at the vertices of two paralleled regular $ N $-polygons with distance $ h > 0 $, and the twist angle between the two regular $ N $-polygons is $ 0\leq\theta < 2\pi $, we study the sufficient and necessary conditions for the existence of the spatial twisted central configuration. Additionally, we obtain the uniqueness of the spatial twisted central configuration.
Citation: Liang Ding, Jinrong Wang, Jinlong Wei. Spatial twisted central configuration for Newtonian ($ 2N $+1)-body problem[J]. Communications in Analysis and Mechanics, 2024, 16(2): 388-415. doi: 10.3934/cam.2024018
For a spatial twisted central configuration of the Newtonian ($ 2N $+1)-body problem where $ 2N $ masses are at the vertices of two paralleled regular $ N $-polygons with distance $ h > 0 $, and the twist angle between the two regular $ N $-polygons is $ 0\leq\theta < 2\pi $, we study the sufficient and necessary conditions for the existence of the spatial twisted central configuration. Additionally, we obtain the uniqueness of the spatial twisted central configuration.

| [1] | A. Wintner, The analytical foundations of celestial mechanics, Princeton University Press, New Jersey, 1941. |
| [2] | L. Euler, De moto rectilineo trium corporum se mutuo attrahentium, Novi. Comm. Acad. Sci. Imp. Petrop., 11 (1767), 144–151. |
| [3] | J. Lagrange, Essai sur le problème des trois crops, Œuvres, 6 (1772), 229–324. |
| [4] |
L. Perko, E. Walter, Regular polygon solutions of the $N$-body problem, Proc. Amer. Math. Soc., 94 (1985), 301–309. https://doi.org/10.1090/S0002-9939-1985-0784183-1 doi: 10.1090/S0002-9939-1985-0784183-1

|
| [5] |
M. Corbera, C. Valls, On centered co-circular central configurations of the $n$-body problem, J. Dyn. Differ. Equ., 31 (2019), 2053–2060. https://doi.org/10.1007/s10884-018-9699-2 doi: 10.1007/s10884-018-9699-2
|
| [6] |
W. Li, Z. Q. Wang, The relationships between regular polygon central configurations and masses for Newtonian $N$-body problems, Phys. Lett. A, 377 (2013), 1875–1880. https://doi.org/10.1016/j.physleta.2013.05.044 doi: 10.1016/j.physleta.2013.05.044
|
| [7] | J. Llibre, R. Moeckel, C. Simó, Central configurations, periodic orbits, and Hamiltonian systems, Birkhäuser, New York, 2015. https://doi.org/10.1007/978-3-0348-0933-7 |
| [8] |
D. G. Saari, On the role and the properties of $n$ body central configurations, Celest. Mech., 21 (1980), 9–20. https://doi.org/10.1007/bf01230241 doi: 10.1007/bf01230241
|
| [9] |
S. Q. Zhang, Q. Zhou, Periodic solutions for planar $2N$-body problems, Proc. Amer. Math. Soc., 131 (2003), 2161–2170. https://doi.org/10.1090/S0002-9939-02-06795-3 doi: 10.1090/S0002-9939-02-06795-3
|
| [10] |
R. Moeckel, C. Simó, Bifurcation of spatial central configurations from planar ones, SIAM. J. Math. Anal., 26 (1995), 978–998. https://doi.org/10.1137/S0036141093248414 doi: 10.1137/S0036141093248414
|
| [11] | E. Barrabés, J. M. Cors, On central configurations of the $\kappa n$-body problem, J. Math. Anal. Appl., 476 (2) (2019), 720–736. https://doi.org/10.1016/j.jmaa.2019.04.010 |
| [12] |
M. Corbera, J. Delgado, J. Llibre, On the existence of central configurations of $p$ nested $n$-gons, Qual. Theory Dyn. Syst., 8 (2009), 255–265. https://doi.org/10.1007/s12346-010-0004-y doi: 10.1007/s12346-010-0004-y
|
| [13] | F. Zhao, J. Chen, Central configurations for $(pN+gN)$-body problems, Celest. Mech. Dyn. Astr., 121 (1) (2015), 101–106. https://10.1007/s10569-014-9593-0 |
| [14] |
J. Lei, M. Santoprete, Rosette central configurations, degenerate central configurations and bifurcations, Celest. Mech. Dyn. Astr., 94 (2006), 271–287. https://doi.org/10.1007/s10569-005-5534-2 doi: 10.1007/s10569-005-5534-2
|
| [15] |
J. Llibre, L. F. Mello, Triple and quadruple nested central configurations for the planar $n$-body problem, Physica D, 238 (2009), 563–571. https://doi.org/10.1016/j.physd.2008.12.014 doi: 10.1016/j.physd.2008.12.014
|
| [16] |
M. Marchesin, A family of three nested regular polygon central configurations, Astrophys. Space Sci., 364 (2019), 1–12. https://doi.org/10.1007/s10509-019-3648-3 doi: 10.1007/s10509-019-3648-3
|
| [17] |
A. Siluszyk, On a class of central configurations in the planar $3n$-body problem, Math. Comput. Sci., 11 (2017), 457–467. http://dx.doi.org/10.1007/s11786-017-0309-1 doi: 10.1007/s11786-017-0309-1
|
| [18] |
Z. Q. Wang, F. Y. Li, A note on the two nested regular polygonal central configurations, Proc. Amer. Math. Soc., 143 (2015), 4817–4822. https://doi.org/10.1090/S0002-9939-2015-12618-4 doi: 10.1090/S0002-9939-2015-12618-4
|
| [19] |
Z. F. Xie, G. Bhusal, H. Tahir, Central configurations in the planar 6-body problem forming two equilateral triangles, J. Geom. Phys., 153 (2020), 1–11. https://doi.org/10.1016/j.geomphys.2020.103645 doi: 10.1016/j.geomphys.2020.103645
|
| [20] |
S. Q. Zhang, C. R. Zhu, Central configurations consist of two layer twisted regular polygons, Sci. China Ser. A, 45 (2002), 1428–1438. https://doi.org/10.1007/BF02880037 doi: 10.1007/BF02880037
|
| [21] |
X. Yu, S. Q. Zhang, Central configurations formed by two twisted regular polygons, J. Math. Anal. Appl., 425 (2015), 372–380. https://doi.org/10.1016/j.jmaa.2014.12.023 doi: 10.1016/j.jmaa.2014.12.023
|
| [22] |
J. Chen, J. B. Luo, Solutions of regular polygon with an inner particle for Newtonian $N$+1-body problem, J. Differ. Equ., 265 (2018), 1248–1258. https://doi.org/10.1016/j.jde.2018.04.004 doi: 10.1016/j.jde.2018.04.004
|
| [23] | T. Ouyang, Z. F. Xie, S. Q. Zhang, Pyramidal central configurations and perverse solutions, Electron. J. Differ. Equ., 1 (2004), 1–9. |
| [24] |
X. Yu, S. Q. Zhang, Twisted angles for central configurations formed by two twisted regular polygons, J. Differ. Equ., 253 (2012), 2106–2122. https://doi.org/10.1016/j.jde.2012.06.017 doi: 10.1016/j.jde.2012.06.017
|
| [25] | M. Marcus, H. Minc, A survey of matrix theory and matrix inequalities, Allyn & Bacon, Boston, 1964. |
| [26] |
L. Ding, J. L. Wei, S. Q. Zhang, The central configuration of the planar ($N$+1)-body problem with a regular $N$-polygon for homogeneous force laws, Astrophys. Space Sci., 367 (2022), 1–9. https://doi.org/10.1007/s10509-022-04095-w doi: 10.1007/s10509-022-04095-w
|
Figures(7)
Liang Ding, Jinrong Wang, Jinlong Wei. Spatial twisted central configuration for Newtonian ($ 2N $+1)-body problem[J]. Communications in Analysis and Mechanics, 2024, 16(2): 388-415. doi: 10.3934/cam.2024018







 DownLoad:
DownLoad: