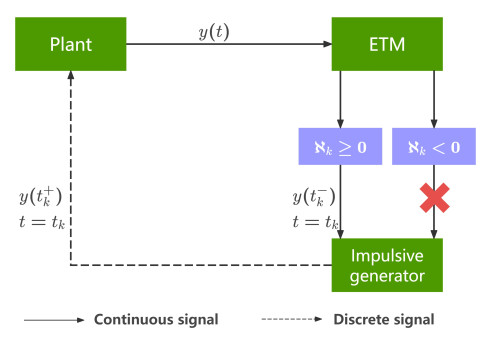
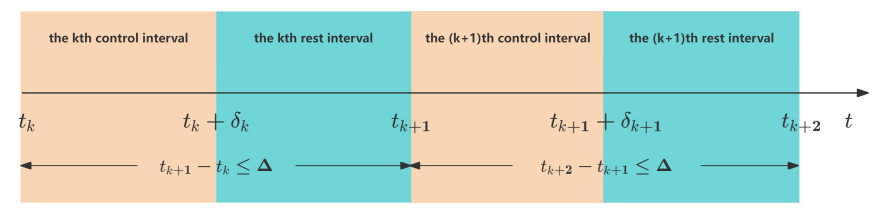
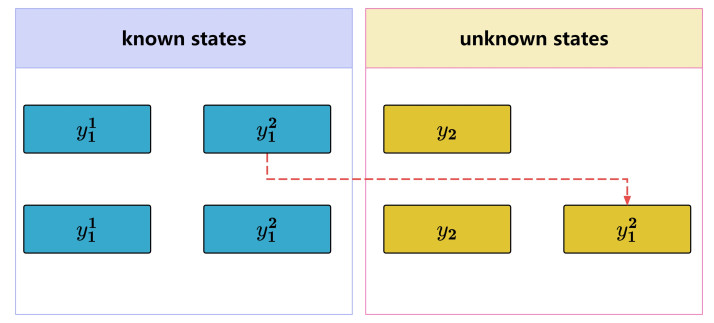
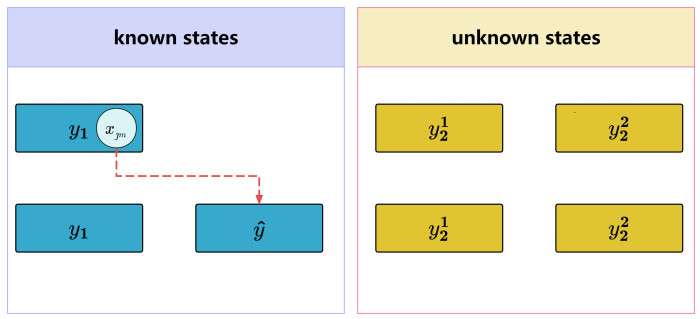
This paper proposes a hybrid control strategy that combines aperiodic intermittent control (APIC) and event-triggered impulsive control (ETIMC) to study the finite-time stabilization (FTS) and finite-time convergence stabilization (FTCS) problems for nonlinear systems with partially known states. By applying the Lyapunov control criterion, linear matrix inequality (LMI) conditions, and dimension extension techniques, impulsive control gains based on partially known states are derived, and sufficient conditions to achieve FTS and FTCS are provided. Within the hybrid control framework, a close relationship between event-triggered parameters, intermittent control width, and boundary parameters is established, effectively avoiding the occurrence of Zeno-behavior. Finally, two numerical examples are presented to validate the effectiveness of the proposed hybrid control method.
Citation: Huiling Li, Jin-E Zhang, Ailong Wu. Finite-time stabilization of nonlinear systems with partially known states via aperiodic intermittent control and event-triggered impulsive control[J]. AIMS Mathematics, 2025, 10(2): 3269-3290. doi: 10.3934/math.2025152
This paper proposes a hybrid control strategy that combines aperiodic intermittent control (APIC) and event-triggered impulsive control (ETIMC) to study the finite-time stabilization (FTS) and finite-time convergence stabilization (FTCS) problems for nonlinear systems with partially known states. By applying the Lyapunov control criterion, linear matrix inequality (LMI) conditions, and dimension extension techniques, impulsive control gains based on partially known states are derived, and sufficient conditions to achieve FTS and FTCS are provided. Within the hybrid control framework, a close relationship between event-triggered parameters, intermittent control width, and boundary parameters is established, effectively avoiding the occurrence of Zeno-behavior. Finally, two numerical examples are presented to validate the effectiveness of the proposed hybrid control method.

| [1] |
T. F. Liu, Z. P. Jiang, Event-based control of nonlinear systems with partial state and output feedback, Automatica, 53 (2015), 10–22. https://doi.org/10.1016/j.automatica.2014.12.027 doi: 10.1016/j.automatica.2014.12.027

|
| [2] |
G. T. Stamov, S. Simeonov, I. M. Stamova, Uncertain impulsive Lotka-Volterra competitive systems: Robust stability of almost periodic solutions, Chaos Soliton. Fract., 110 (2018), 178–184. https://doi.org/10.1016/j.chaos.2018.03.017 doi: 10.1016/j.chaos.2018.03.017
|
| [3] |
Z. J. Wu, Stability criteria of random nonlinear systems and their applications, IEEE T. Automat. Contr., 60 (2014), 1038–1049. https://doi.org/10.1109/TAC.2014.2365684 doi: 10.1109/TAC.2014.2365684
|
| [4] |
P. S. Rivadeneira, C. H. Moog, Observability criteria for impulsive control systems with applications to biomedical engineering processes, Automatica, 55 (2015), 125–131. https://doi.org/10.1016/j.automatica.2015.02.042 doi: 10.1016/j.automatica.2015.02.042
|
| [5] |
J. Xiao, Y. Y. Hu, Z. G. Zeng, Fixed/predefined-time synchronization of memristive neural networks based on state variable index coefficient, Neurocomputing, 560 (2023), 126849. https://doi.org/10.1016/j.neucom.2023.126849 doi: 10.1016/j.neucom.2023.126849
|
| [6] |
H. F. Min, S. Y. Xu, Z. Q. Zhang, Adaptive finite-time stabilization of stochastic nonlinear systems subject to full-state constraints and input saturation, IEEE T. Automat. Contr., 66 (2020), 1306–1313. https://doi.org/10.1109/TAC.2020.2990173 doi: 10.1109/TAC.2020.2990173
|
| [7] |
L. M. Wang, Z. G. Zeng, M. F. Ge, A disturbance rejection framework for finite-time and fixed-time stabilization of delayed memristive neural networks, IEEE T. Syst. Man Cy.-S., 51 (2021), 905–915. https://doi.org/10.1109/TSMC.2018.2888867 doi: 10.1109/TSMC.2018.2888867
|
| [8] |
B. Zhou, Finite-time stability analysis and stabilization by bounded linear time-varying feedback, Automatica, 121 (2020), 109191. https://doi.org/10.1016/j.automatica.2020.109191 doi: 10.1016/j.automatica.2020.109191
|
| [9] |
X. Y. Zhang, C. D. Li, H. F. Li, Finite-time stabilization of nonlinear systems via impulsive control with state-dependent delay, J. Franklin I., 359 (2022), 1196–1214. https://doi.org/10.1016/j.jfranklin.2021.11.013 doi: 10.1016/j.jfranklin.2021.11.013
|
| [10] |
X. D. Li, X. Y. Yang, S. J. Song, Lyapunov conditions for finite-time stability of time-varying time-delay systems, Automatica, 103 (2019), 135–140. https://doi.org/10.1016/j.automatica.2019.01.031 doi: 10.1016/j.automatica.2019.01.031
|
| [11] |
J. Ge, L. P. Xie, S. X. Fang, K. J. Zhang, Lyapunov conditions for finite-time stability of stochastic functional systems, Int. J. Control Autom., 22 (2024), 106–115. https://doi.org/10.1007/s12555-022-0516-7 doi: 10.1007/s12555-022-0516-7
|
| [12] |
C. D. Li, G. Feng, X. F. Liao, Stabilization of nonlinear systems via periodically intermittent control, IEEE T. Circuits-II, 54 (2007), 1019–1023. https://doi.org/10.1109/TCSII.2007.903205 doi: 10.1109/TCSII.2007.903205
|
| [13] |
Y. Liu, J. Liu, W. X. Liu, Stabilization of highly nonlinear stochastic coupled systems via periodically intermittent control, IEEE T. Automat. Contr., 66 (2021), 4799–4806. https://doi.org/10.1109/TAC.2020.3036035 doi: 10.1109/TAC.2020.3036035
|
| [14] |
C. Wei, X. P. Wang, M. Hui, Z. G. Zeng, Quasi-synchronization of fractional multiweighted coupled neural networks via aperiodic intermittent control, IEEE T. Cybernetics, 54 (2024), 1671–1684. https://doi.org/ 10.1109/TCYB.2023.3237248 doi: 10.1109/TCYB.2023.3237248
|
| [15] |
J. J. Chen, B. S. Chen, Z. G. Zeng, Exponential quasi-synchronization of coupled delayed memristive neural networks via intermittent event-triggered control, Neural Networks, 141 (2021), 98–106. https://doi.org/10.1016/j.neunet.2021.01.013 doi: 10.1016/j.neunet.2021.01.013
|
| [16] |
B. Liu, M. Yang, T. Liu, Stabilization to exponential input-to-state stability via aperiodic intermittent control, IEEE T. Automat. Contr., 66 (2020), 2913–2919. https://doi.org/10.1109/TAC.2020.3014637 doi: 10.1109/TAC.2020.3014637
|
| [17] |
Y. Guo, M. Y. Duan, P. F. Wang, Input-to-state stabilization of semilinear systems via aperiodically intermittent event-triggered control, IEEE Trans. Control Netw. Syst., 9 (2022), 731–741. https://doi.org/10.1109/TCNS.2022.3165511 doi: 10.1109/TCNS.2022.3165511
|
| [18] |
B. Liu, M. Yang, T. Liu, D. J. Hill, Stabilization to exponential input-to-state stability via aperiodic intermittent control, IEEE T. Automat. Contr., 66 (2020), 2913–2919. https://doi.org/10.1109/TAC.2020.3014637 doi: 10.1109/TAC.2020.3014637
|
| [19] |
B. Liu, M. Meng, B. Xu, G. H. Zhang, Exponential stabilization of continuous-time dynamical systems via time and event triggered aperiodic intermittent control, Appl. Math. Comput., 398 (2021), 31–38. https://doi.org/10.1016/j.amc.2020.125713 doi: 10.1016/j.amc.2020.125713
|
| [20] |
X. Y. Chen, Y. Liu, Q. H. Ruan, J. D. Cao, Stabilization of nonlinear time-delay systems: Flexible delayed impulsive control, Appl. Math. Model., 114 (2023), 488–501. https://doi.org/10.1016/j.apm.2022.10.013 doi: 10.1016/j.apm.2022.10.013
|
| [21] |
Y. Y. Li, J. Q. Lu, A. S. Alofi, J. G. Lou, Impulsive cluster synchronization for complex dynamical networks with packet loss and parameters mismatch, Appl. Math. Model., 112 (2022), 215–223. https://doi.org/10.1016/j.apm.2022.07.022 doi: 10.1016/j.apm.2022.07.022
|
| [22] |
M. Y. Li, M. Z. Wang, W. L. Liu, S. C. Wu, X. D. Li, Exponential stability of nonlinear systems via event-triggered impulsive control based on partial states, Appl. Math. Comput., 459 (2023), 128274. https://doi.org/10.1016/j.amc.2023.128274 doi: 10.1016/j.amc.2023.128274
|
| [23] |
M. Y. Li, H. Z. Chen, X. D. Li, Exponential stability of nonlinear systems involving partial unmeasurable states via impulsive control, Chaos Soliton. Fract., 142 (2021), 110505. https://doi.org/10.1016/j.chaos.2020.110505 doi: 10.1016/j.chaos.2020.110505
|
| [24] |
M. Y. Li, X. Y. Yang, X. D. Li, Delayed impulsive control for lag synchronization of delayed neural networks involving partial unmeasurable states, IEEE T. Neur. Net. Lear., 35 (2022), 783–791. https://doi.org/10.1109/TNNLS.2022.3177234 doi: 10.1109/TNNLS.2022.3177234
|
| [25] |
Y. N. Wang, C. D. Li, H. G. Wu, H. Deng, Stabilization of nonlinear delayed systems subject to impulsive disturbance via aperiodic intermittent control, J. Franklin I., 361 (2024), 106675. https://doi.org/10.1016/j.jfranklin.2024.106675 doi: 10.1016/j.jfranklin.2024.106675
|
| [26] |
P. L. Yu, F. Q. Deng, X. Y. Zhao, Y. G. Huang, Stability analysis of nonlinear systems in the presence of event-triggered impulsive control, Int. J. Robust Nonlin., 34 (2024), 3835–3853. https://doi.org/10.1002/rnc.7165 doi: 10.1002/rnc.7165
|
| [27] |
X. D. Li, X. Y. Yang, J. D. Cao, Event-triggered impulsive control for nonlinear delay systems, Automatica, 117 (2020), 108981. https://doi.org/10.1016/j.automatica.2020.108981 doi: 10.1016/j.automatica.2020.108981
|
| [28] |
B. Liu, Z. J. Sun, Y. H. Luo, Y. X. Zhong, Uniform synchronization for chaotic dynamical systems via event-triggered impulsive control, Physica A, 531 (2019), 121725. https://doi.org/10.1016/j.physa.2019.121725 doi: 10.1016/j.physa.2019.121725
|
| [29] |
Y. F. Zhou, H. Zhang, Z. G. Zeng, Quasisynchronization of memristive neural networks with communication delays via event-triggered impulsive control, IEEE T. Cybernetics, 52 (2020), 7682–7693. https://doi.org/10.1109/TCYB.2020.3035358 doi: 10.1109/TCYB.2020.3035358
|
| [30] |
X. G. Tan, J. D. Cao, X. D. Li, Consensus of leader-following multiagent systems: A distributed event-triggered impulsive control strategy, IEEE T. Cybernetics, 49 (2018), 792–801. https://doi.org/10.1109/TCYB.2017.2786474 doi: 10.1109/TCYB.2017.2786474
|
| [31] |
M. Y. Li, X. D. Li, Synchronization of neural networks involving unmeasurable states and impulsive disturbances by observer and feedback control, Commun. Nonlinear Sci., 125 (2023), 107396. https://doi.org/10.1016/j.cnsns.2023.107396 doi: 10.1016/j.cnsns.2023.107396
|
| [32] |
L. L. Li, C. F. Yang, H. Li, W. L. Heng, Exponential stability of impulsive switched nonlinear systems with partial unmeasurable states on time scales, J. Comput. Nonlin. Dyn., 19 (2024), 1–9. https://doi.org/10.1115/1.4065783 doi: 10.1115/1.4065783
|
| [33] |
C. D. Li, X. F. Liao, T. W. Huang, Exponential stabilization of chaotic systems with delay by periodically intermittent control, Chaos, 17 (2007), 013103. https://doi.org/10.1063/1.2430394 doi: 10.1063/1.2430394
|
| [34] |
E. N. Sanchez, J. P. Perez, Input-to-state stability (ISS) analysis for dynamic neural networks, IEEE T. Circuits-I Fundam. Theory Appl., 46 (1999), 1395–1398. http://doi.org/10.1109/81.802844 doi: 10.1109/81.802844
|
| [35] | S. Boyd, L. El Ghaoui, E. Feron, V. Balakrishnan, Linear matrix inequalities in system and control theory, Philadelphia, PA: SIAM, 1994. http://doi.org/10.1137/1.9781611970777 |
| [36] |
R. Zheng, X. L. Yi, W. L. Lu, T. P. Chen, Stability of analytic neural networks with event-triggered synaptic feedbacks, IEEE T. Neur. Net. Lear., 27 (2016), 483–494. https://doi.org/10.1109/TNNLS.2015.2488903 doi: 10.1109/TNNLS.2015.2488903
|
| [37] |
N. X. Yu, W. Zhu, Event-triggered impulsive chaotic synchronization of fractional-order differential systems, Appl. Math. Comput., 388 (2021), 125554. https://doi.org/10.1016/j.amc.2020.125554 doi: 10.1016/j.amc.2020.125554
|
Figures(10)

Huiling Li, Jin-E Zhang, Ailong Wu. Finite-time stabilization of nonlinear systems with partially known states via aperiodic intermittent control and event-triggered impulsive control[J]. AIMS Mathematics, 2025, 10(2): 3269-3290. doi: 10.3934/math.2025152







 DownLoad:
DownLoad: