Due to industrialization and urbanization, the world is experiencing environmental degradation at an alarming rate. Irresponsible human behaviors have caused environmental concerns that are drastically affecting the natural ecosystem. To ensure a sustainable future for all, pro-environmental behavior should be practiced among university students to protect and conserve the environment. The objective of the study is to determine the key factors affecting pro-environmental behavior among Universiti Malaya (UM) students. A theoretical framework, theory of planned behavior (TPB), was introduced to examine whether environmental attitudes, subjective norms and perceived behavioral control have significant effects on intention and on pro-environmental behavior. Data collected from 394 respondents via online questionnaire was then examined using Statistical Package for the Social Sciences (SPSS). The results show that environmental attitude, subjective norm and perceived behavioral control have significant impact on the intention to adopt pro-environmental behavior among UM students. The results indicate that perceived behavioral control did not significantly influence pro-environmental behavior among UM students. The study also revealed that no significant difference was shown in gender and study background towards pro-environmental behavior. These findings assist higher education institutions in formulating polices, strategies and planning to enhance environmental behavior among the students. They also offer new insights and comprehensive information for researchers in conducting research related to environment behavior.
Citation: Grace Phang, Zul Ilham. Theory of planned behavior to understand pro-environmental behavior among Universiti Malaya students[J]. AIMS Environmental Science, 2023, 10(5): 691-708. doi: 10.3934/environsci.2023038
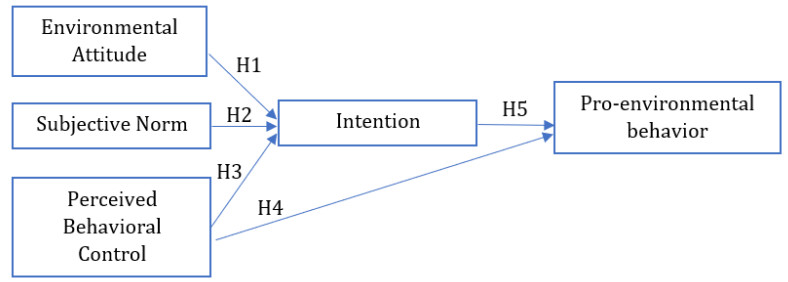
Due to industrialization and urbanization, the world is experiencing environmental degradation at an alarming rate. Irresponsible human behaviors have caused environmental concerns that are drastically affecting the natural ecosystem. To ensure a sustainable future for all, pro-environmental behavior should be practiced among university students to protect and conserve the environment. The objective of the study is to determine the key factors affecting pro-environmental behavior among Universiti Malaya (UM) students. A theoretical framework, theory of planned behavior (TPB), was introduced to examine whether environmental attitudes, subjective norms and perceived behavioral control have significant effects on intention and on pro-environmental behavior. Data collected from 394 respondents via online questionnaire was then examined using Statistical Package for the Social Sciences (SPSS). The results show that environmental attitude, subjective norm and perceived behavioral control have significant impact on the intention to adopt pro-environmental behavior among UM students. The results indicate that perceived behavioral control did not significantly influence pro-environmental behavior among UM students. The study also revealed that no significant difference was shown in gender and study background towards pro-environmental behavior. These findings assist higher education institutions in formulating polices, strategies and planning to enhance environmental behavior among the students. They also offer new insights and comprehensive information for researchers in conducting research related to environment behavior.

| [1] |
Cafaro P, Hansson P, Götmark F (2022) Overpopulation is a major cause of biodiversity loss and smaller human populations are necessary to preserve what is left. Biol Conserv 272: 109646. https://doi.org/10.1016/j.biocon.2022.109646 doi: 10.1016/j.biocon.2022.109646

|
| [2] |
Su K, Su YL, Deutsch L, et al. (2020) The moderating effect of pro-environmental self-identity in the relationship between abnormally-shaped foods and purchase intention. AIMS Environ Sci 7: 247–257. https://doi.org/10.3934/environsci.2020015 doi: 10.3934/environsci.2020015
|
| [3] | IPCC (2023) Climate change 2023: Synthesis report. Retrieved from https://www.ipcc.ch/report/ar6/syr/downloads/report/IPCC_AR6_SYR_SPM.pdf |
| [4] |
Valor C, Antonetti P, Merino A (2020) The relationship between moral competences and sustainable consumption among higher education students. J Clean Prod 248: 119161. https://doi.org/10.1016/j.jclepro.2019.119161 doi: 10.1016/j.jclepro.2019.119161
|
| [5] |
Bowd D, McKay C, Shaw WS (2015) Urban greening: environmentalism or marketable aesthetics. AIMS Environ Sci 2: 935–949. https://doi.org/10.3934/environsci.2015.4.935 doi: 10.3934/environsci.2015.4.935
|
| [6] |
Asmuni S, Khalili JM, Zain ZM (2012) Sustainable consumption practices of students in an urban setting: A case in Selangor. Procedia Soc Behav Sci 36: 716–722. https://doi.org/10.1016/j.sbspro.2012.03.078 doi: 10.1016/j.sbspro.2012.03.078
|
| [7] |
Correia E, Sousa S, Viseu C, et al. (2022) Using the theory of planned behavior to understand the students' pro-environmental behavior: A case-study in a Portuguese HEI. Int J Sust Higher Edu 23: 1070–1089. https://doi.org/10.1108/IJSHE-05-2021-0201 doi: 10.1108/IJSHE-05-2021-0201
|
| [8] |
Sterling S (2010) Learning for resilience, or the resilient learner? Towards a necessary reconciliation in a paradigm of sustainable education. Environ Edu Res 16: 511–528. https://doi.org/10.1080/13504622.2010.505427 doi: 10.1080/13504622.2010.505427
|
| [9] | Gifford R, Sussman R (2012) 65 Environmental Attitudes. In S. D. Clayton (Ed.), The Oxford Handbook of Environmental and Conservation Psychology: Oxford University Press. |
| [10] |
Ajzen I (1991) The theory of planned behavior. Org Behav Human Dec Proc 50: 179–211. https://doi.org/10.1016/0749-5978(91)90020-T doi: 10.1016/0749-5978(91)90020-T
|
| [11] |
Shafiei A, Maleksaeidi H (2020) Pro-environmental behavior of university students: Application of protection motivation theory. Global Eco Conserv 22: e00908. https://doi.org/10.1016/j.gecco.2020.e00908 doi: 10.1016/j.gecco.2020.e00908
|
| [12] | Ferrari P (2020) Pro-environmental behaviour, environmental attitude and perceived behavioural control in a sample of young Irish adults. National College of Ireland, Retrieved from https://norma.ncirl.ie/4823/1/paulaferrari.pdf |
| [13] |
Kollmuss A, Agyeman J (2002) Mind the Gap: Why Do People Act Environmentally and What Are the Barriers to Pro-Environmental Behavior? Environ Edu Res 8: 239–260. https://doi.org/10.1080/13504620220145401 doi: 10.1080/13504620220145401
|
| [14] |
Chen SC, Hung CW (2016) Elucidating the factors influencing the acceptance of green products: An extension of theory of planned behavior. Technol Forecast Soc Change 112: 155–163. https://doi.org/10.1016/j.techfore.2016.08.022 doi: 10.1016/j.techfore.2016.08.022
|
| [15] |
Rivis A, Sheeran P (2003) Descriptive norms as an additional predictor in the theory of planned behaviour: A meta-analysis. Curr Psycho 22: 218–233. https://doi.org/10.1007/s12144-003-1018-2 doi: 10.1007/s12144-003-1018-2
|
| [16] |
Xu Y, Du J, Khan MAS, et al. (2022) Effects of Subjective Norms and Environmental Mechanism on Green Purchase Behavior: An Extended Model of Theory of Planned Behavior. Front Environ Sci 10:779629. https://doi.org/10.3389/fenvs.2022.779629 doi: 10.3389/fenvs.2022.779629
|
| [17] |
Wan C, Shen GQ, Yu A (2014) The role of perceived effectiveness of policy measures in predicting recycling behaviour in Hong Kong. Resources Conserv Recycling 83: 141–151. https://doi.org/10.1016/j.resconrec.2013.12.009 doi: 10.1016/j.resconrec.2013.12.009
|
| [18] | Braakhuis L (2016) Predicting pro-environmental behavior: Analyzing variables related to plastic waste separation behavior of young people. Utrecht University, Retrieved from https://studenttheses.uu.nl/handle/20.500.12932/25447 |
| [19] |
Ilham Z, Saad NAI, Wan-Mohtar WAAQI, et al. (2022) Multi-criteria decision analysis for evaluation of potential renewable energy resources in Malaysia. Prog Energy Enviro 21: 8–18. https://doi.org/10.37934/progee.21.1.818 doi: 10.37934/progee.21.1.818
|
| [20] |
Henseler J, Ringle CM, Sarstedt M (2015) A new criterion for assessing discriminant validity in variance-based structural equation modeling. J Academy Marketing Sci 43: 115–135. https://doi.org/10.1007/s11747-014-0403-8 doi: 10.1007/s11747-014-0403-8
|
| [21] | Aziz A (2020) Applying theory of planned behavior to understand pro-environmental intention and behavior of students. J Business Manage Accounting 1: 1–15. |
| [22] |
Choon TG, Sulaiman A, Mallasi H (2014) Intention to use green IT among students. Int J Research Business Technol 4: 439–445 https://doi.org/10.17722/ijrbt.v4i2.261 doi: 10.17722/ijrbt.v4i2.261
|
| [23] |
Hasan SNMS, Harun R, Hock LK (2015) Application of theory of planned behavior in measuring the behavior to reduce plastic consumption among students at Universiti Putra Malaysia, Malaysia. Proc Environ Sci 30: 195–200. https://doi.org/10.1016/j.proenv.2015.10.035 doi: 10.1016/j.proenv.2015.10.035
|
| [24] |
Tamar M, Wirawan H, Arfah T, et al. (2021) Predicting pro-environmental behaviours: the role of environmental values, attitudes and knowledge. Manage Environ Quality: An Int J 32: 328–343. https://doi.org/10.1108/MEQ-12-2019-0264 doi: 10.1108/MEQ-12-2019-0264
|
| [25] |
Chan TJ, Halmee N, Samson J (2023) Factors Influencing Pro-environmental Behavior to Use Public Transport: A Predictive Approach. Proc Int Conf Comm, Lang, Edu Soc Sci 704: 213–238. https://doi.org/10.2991/978-2-494069-61-9_21 doi: 10.2991/978-2-494069-61-9_21
|
| [26] |
Alam SS, Lin CY, Ahmad M, et al. (2019) Factors Affecting Energy-Efficient Household Products Buying Intention: Empirical Study. Environ Climate Technol 23: 84–97. https://doi.org/10.2478/rtuect-2019-0006 doi: 10.2478/rtuect-2019-0006
|
| [27] |
Cristea M, Gheorghiu A (2016) Attitude, perceived behavioral control, and intention to adopt risky behaviors. Transport Res Part F: Traffic Psycho Behav 43: 157–165. https://doi.org/10.1016/j.trf.2016.10.004 doi: 10.1016/j.trf.2016.10.004
|
| [28] |
Armitage CJ, Conner M (2001) Efficacy of the Theory of Planned Behaviour: A meta-analytic review. British J Soc Psycho 40: 471–499. https://doi.org/10.1348/014466601164939 doi: 10.1348/014466601164939
|
| [29] |
Khan F, Ahmed W, Najmi A (2019) Understanding consumers' behavior intentions towards dealing with the plastic waste: Perspective of a developing country. Resource Conserv Recycling 142: 49–58. https://doi.org/10.1016/j.resconrec.2018.11.020 doi: 10.1016/j.resconrec.2018.11.020
|
| [30] |
Lee SS, Kim Y, Roh T (2023) Pro-environmental behavior on electric vehicle use intention: Integrating value-belief-norm theory and theory of planned behavior. J Clean Prod 418: 138211. https://doi.org/10.1016/j.jclepro.2023.138211 doi: 10.1016/j.jclepro.2023.138211
|
| [31] |
Hansmann R, Laurenti R, Mehdi T, et al. (2020) Determinants of pro-environmental behavior: A comparison of university students and staff from diverse faculties at a Swiss University. J Clean Prod 268: 121864. https://doi.org/10.1016/j.jclepro.2020.121864 doi: 10.1016/j.jclepro.2020.121864
|
| [32] |
Desa A, Kadir N, Yusooff F (2012) Environmental awareness and education: A key approach to solid waste management (SWM)–A case study of a University in Malaysia. Waste Manage-An Integrated Vision 34. https://doi.org/10.5772/48169 doi: 10.5772/48169
|
| [33] | Octav-Ionut M (2015) Applying the Theory of Planned Behavior in Predicting Pro-Environmental Behaviour: The Case of Energy Conservation. Acta Universitat Danubius Economica 11: 15–32. |
| [34] |
Jamaludin AA, Mahmood NZ, Ilham Z (2017) Performance of electricity usage at residential college buildings in the University of Malaya campus. Energy Sustain Develop 40: 85–102. https://doi.org/10.1016/j.esd.2017.07.005 doi: 10.1016/j.esd.2017.07.005
|
| [35] |
Cleveland M, Kalamas M, Laroche M (2012) It's not easy being green: Exploring green creeds, green deeds, and environmental locus of control. Psycho Market 29: 293–305. https://doi.org/10.1002/mar.20522 doi: 10.1002/mar.20522
|
| [36] | Blocker TJ, Eckberg DL (1997) Gender and environmentalism: Results from the 1993 general social survey. Soc Sci Quarter 78: 841–858. Retrieved from http://www.jstor.org/stable/42863735 |
| [37] |
Kim Y, Wang Q, Roh T (2021) Do information and service quality affect perceived privacy protection, satisfaction, and loyalty? Evidence from a Chinese O2O-based mobile shopping application. Telemat Inform 56: 101483. https://doi.org/10.1016/j.tele.2020.101483 doi: 10.1016/j.tele.2020.101483
|
| [38] |
Xiao C, Hong D (2010) Gender differences in environmental behaviors in China. Popul Environ 32: 88–104. https://doi.org/10.1007/s11111-010-0115-z doi: 10.1007/s11111-010-0115-z
|
| [39] |
Hair J, Alamer A (2022) Partial Least Squares Structural Equation Modeling (PLS-SEM) in second language and education research: Guidelines using an applied example. Res Methods Appl Ling 1: 100027. https://doi.org/10.1016/j.rmal.2022.100027 doi: 10.1016/j.rmal.2022.100027
|
| [40] | Fornell C, Larcker DF (1981) Evaluating structural equation models with unobservable variables and measurement error. J Market Res 18: 39–50. |
| [41] | Gold A, Malhotra A, Segars A (2001) Knowledge management: An organizational capabilities perspective. J Manage Info Systems 18: 185–214. |
| [42] |
Podsakoff PM, MacKenzie SB, Lee JY, et al. (2003) Common method biases in behavioral research: A critical review of the literature and recommended remedies. J Appl Psycho, 88: 879–903. https://doi.org/10.1037/0021-9010.88.5.879 doi: 10.1037/0021-9010.88.5.879
|
| [43] |
Kock N, Lynn GS (2012) Lateral collinearity and misleading results in variance-based SEM: An illustration and recommendations. J Assoc Inform Systems 13. https://doi.org/10.17705/1jais.00302 doi: 10.17705/1jais.00302
|
| [44] |
Roh T, Seok J, Kim Y (2022) Unveiling ways to reach organic purchase: Green perceived value, perceived knowledge, attitude, subjective norm, and trust. J Retail Consumer Serv 67: 102988. https://doi.org/10.1016/j.jretconser.2022.102988 doi: 10.1016/j.jretconser.2022.102988
|
| [45] |
Yazdanpanah M, Forouzani M (2015) Application of the theory of planned behaviour to predict Iranian students' intention to purchase organic food. J Clean Prod 107: 342–352. https://doi.org/10.1016/j.jclepro.2015.02.071 doi: 10.1016/j.jclepro.2015.02.071
|
| [46] |
Effendi MI, Sugandini D, Sukarno A, et al. (2020) The theory of planned behavior and pro-environmental behavior among students. J Environ Manage Tourism 11: 35–43. https://doi.org/10.14505/jemt.v11.1(41).0 doi: 10.14505/jemt.v11.1(41).0
|
| [47] |
Wang S, Fan J, Zhao D, et al. (2016) Predicting consumers' intention to adopt hybrid electric vehicles: using an extended version of the theory of planned behavior model. Transportation 43: 123–143. https://doi.org/10.1007/s11116-014-9567-9 doi: 10.1007/s11116-014-9567-9
|
| [48] | Aziz A (2019) Applying theory of planned behavior to understand pro-environmental intention and behavior of students. Arthatama, 3: 1–15. |
| [49] | Hassan N, Othman SN, Yaacob NA (2018) Determinants of theory of planned behaviour model in measuring sustainable behaviour among students of public universities in Malaysia. J Inform System Technol Manage 3: 1–12. |
| [50] |
Jamaludin AA, Ilham Z, Zulkifli NEI, et al. (2020) Understanding perception and interpretation of Malaysian university students on renewable energy. AIMS Energy 8: 1029–1044. https://doi.org/10.3934/energy.2020.6.1029 doi: 10.3934/energy.2020.6.1029
|
| [51] |
Kim Y, Roh T (2022) Preparing an exhibition in the post-pandemic era: Evidence from an O2O-based exhibition of B2B firms. Technol Forecast Soc Change 185: 122041. https://doi.org/10.1016/j.techfore.2022.122041 doi: 10.1016/j.techfore.2022.122041
|
| [52] |
Ilham Z, Subramaniam I, Jamaludin AA, et al. (2022) Analysing dimensions and indicators to design energy education framework in Malaysia using the analytic hierarchy process (AHP). Energy Rep 8: 1013–1024. https://doi.org/10.1016/j.egyr.2022.07.126 doi: 10.1016/j.egyr.2022.07.126
|




Figures(5) / Tables(8)

Grace Phang, Zul Ilham. Theory of planned behavior to understand pro-environmental behavior among Universiti Malaya students[J]. AIMS Environmental Science, 2023, 10(5): 691-708. doi: 10.3934/environsci.2023038







 DownLoad:
DownLoad: