In a world the more and more affected by sudden, unpredictable natural and/or industrial disasters, with few or without warning signs, it is essential to understand, analyze and control population behaviors during such events.
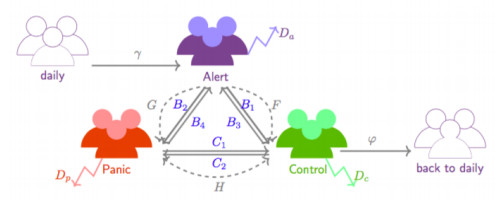
Our objective is to model and investigate the actions that can be deployed by operational staff during catastrophic events in order to optimize risk management, reduce panic and save lives. For this purpose, we propose and solve an optimal control problem by using Pontryagin's Maximum Principle. Finally, we determine the best control strategy in the realistic scenario of a tsunami on the French Riviera.
Citation: Irmand Mikiela, Valentina Lanza, Nathalie Verdière, Damienne Provitolo. Optimal strategies to control human behaviors during a catastrophic event[J]. AIMS Mathematics, 2022, 7(10): 18450-18466. doi: 10.3934/math.20221015
In a world the more and more affected by sudden, unpredictable natural and/or industrial disasters, with few or without warning signs, it is essential to understand, analyze and control population behaviors during such events.
Our objective is to model and investigate the actions that can be deployed by operational staff during catastrophic events in order to optimize risk management, reduce panic and save lives. For this purpose, we propose and solve an optimal control problem by using Pontryagin's Maximum Principle. Finally, we determine the best control strategy in the realistic scenario of a tsunami on the French Riviera.

| [1] | L. Boschetti, D. Provitolo, E. Tric, A method to analyze territory resilience to natural hazards, the example of the French Riviera against tsunami, EGU General Assembly Conference Abstracts, 19 (2017), 12935. |
| [2] |
G. Cantin, N. Verdière, V. Lanza, Synchronization under control in complex networks for a panic model, International Conference on Computational Science, (2019), 262–275. https://doi.org/10.1007/978-3-030-22741-8_19 doi: 10.1007/978-3-030-22741-8_19

|
| [3] |
G. Cantin, N. Verdière, V. Lanza, M. Aziz-Alaoui, R. Charrier, C. Bertelle, et al., Mathematical modeling of human behaviors during catastrophic events: stability and bifurcations, Int. J. Bifurcat. Chaos, 26 (2016), 1630025. https://doi.org/10.1142/S0218127416300251 doi: 10.1142/S0218127416300251
|
| [4] |
F. E. Cornes, G. A. Frank, C. O. Dorso, Fear propagation and the evacuation dynamics, Simul. Model. Pract. Th., 95 (2019), 112–133. https://doi.org/10.1016/j.simpat.2019.04.012 doi: 10.1016/j.simpat.2019.04.012
|
| [5] | L. Crocq, Paniques Collectives (Les), Odile Jacob, 2013. |
| [6] | E. Dubos-Paillard, A. Berred, D. Provitolo, Classification des catastrophes fondée sur l'analyse des relations entre les propriétés de l'événement et les comportements humains, Technical report, ANR, 2021. |
| [7] | W. H. Fleming, R. W. Rishel, Deterministic and stochastic optimal control, vol. 1, Springer Science & Business Media, 2012. |
| [8] |
D. T. Gilbert, R. B. Giesler, K. A. Morris, When comparisons arise., J. Pers. Soc. Psychol., 69 (1995), 227. https://doi.org/10.1037/0022-3514.69.2.227 doi: 10.1037/0022-3514.69.2.227
|
| [9] | D. Helbing, A. Johansson, Pedestrian, crowd, and evacuation dynamics, arXiv preprint arXiv: 1309.1609. |
| [10] |
H. W. Hethcote, The mathematics of infectious diseases, SIAM review, 42 (2000), 599–653. https://doi.org/10.1137/S0036144500371907 doi: 10.1137/S0036144500371907
|
| [11] |
V. Lanza, E. Dubos-Paillard, R. Charrier, N. Verdière, D. Provitolo, O. Navarro, et al., Spatio-temporal dynamics of human behaviors during disasters: A mathematical and geographical approach, Complex Systems, Smart Territories and Mobility, (2021), 201–218. https://doi.org/10.1007/978-3-030-59302-5_11 doi: 10.1007/978-3-030-59302-5_11
|
| [12] | V. Lanza, D. Provitolo, N. Verdière, C. Bertelle, E. Dubos-Paillard, R. Charrier, et al., Modeling and analyse of the impact of risk culture on the human behavior during a catastrophic event, Submitted. |
| [13] | D. L. Lukes, Differential equations: classical to controlled, Elsevier, 1982. |
| [14] |
F. Martinez-Gil, M. Lozano, I. García-Fernández, F. Fernández, Modeling, evaluation and scale on artificial pedestrians: A literature review, ACM Comput. Surv., 50 (2017), 1–35. https://doi.org/10.1145/3117808 doi: 10.1145/3117808
|
| [15] |
B. Maury, J. Venel, A discrete contact model for crowd motion, ESAIM: Math. Model. Num., 45 (2011), 145–168. https://doi.org/10.1051/m2an/2010035 doi: 10.1051/m2an/2010035
|
| [16] | L. Perko, Differential equations and dynamical systems, Springer, New York, 3rd edn., 2001. https://doi.org/10.1007/978-1-4613-0003-8 |
| [17] | D. Provitolo, E. Dubos-Paillard, J.-P. Müller, Emergent human behaviour during a disaster: Thematic versus complex systems approaches, European Conference on Complex System, (2011), 1–11. |
| [18] |
D. Provitolo, E. Dubos-Paillard, N. Verdière, V. Lanza, R. Charrier, C. Bertelle, M. Aziz-Alaoui, Les comportements humains en situation de catastrophe: de l'observation à la modélisation conceptuelle et mathématique, Cybergeo: European Journal of Geography, (2015), 735. https://doi.org/10.4000/cybergeo.27150 doi: 10.4000/cybergeo.27150
|
| [19] | D. Provitolo, A. Tricot, A. Schleyer-Lindenmann, A.-H. Boudoukha, N. Verdière, S. Haule, et al., Saisir les comportements humains en situation de catastrophes : proposition d'une démarche méthodologique immersive, Cybergeo : European Journal of Geography, in press. |
| [20] | M. Reghezza-Zitt, S. Rufat, Resilience imperative: uncertainty, risks and disasters, Elsevier, 2015. |
| [21] |
W. Tong, L. Cheng, Simulation of pedestrian flow based on multi-agent, Procedia-Social and Behavioral Sciences, 96 (2013), 17–24. https://doi.org/10.1016/j.sbspro.2013.08.005 doi: 10.1016/j.sbspro.2013.08.005
|
| [22] |
E. Trélat, Optimal control and applications to aerospace: some results and challenges, J. Optimiz. Theory App., 154 (2012), 713–758. https://doi.org/10.1007/s10957-012-0050-5 doi: 10.1007/s10957-012-0050-5
|
| [23] | A. Tricot, D. Provitolo, E. Dubos-Paillard, Typologie synthétique des comportements humains lors de catastrophes, Technical report, ANR, 2020. |
| [24] | N. Verdière, V. Lanza, R. Charrier, D. Provitolo, E. Dubos-Paillard, C. Bertelle, et al., Mathematical modeling of human behaviors during catastrophic events, 4th International Conference on Complex Systems and Applications (ICCSA2014), (2014), 67–74. |
| [25] |
N. Verdière, O. Navarro, A. Naud, A. Berred, D. Provitolo, Towards parameter identification of a behavioral model from a virtual reality experiment, Mathematics, 9 (2021), 3175. https://doi.org/10.3390/math9243175 doi: 10.3390/math9243175
|
| [26] |
X. Wang, L. Zhang, Y. Lin, Y. Zhao, X. Hu, Computational models and optimal control strategies for emotion contagion in the human population in emergencies, Knowledge-Based Systems, 109 (2016), 35–47. https://doi.org/10.1016/j.knosys.2016.06.022 doi: 10.1016/j.knosys.2016.06.022
|
| [27] | V. Zachariadis, J. Amos, B. Kohn, Simulating pedestrian route-choice behavior under transient traffic conditions, in Pedestrian Behavior, Emerald Group Publishing Limited, 2009. https://doi.org/10.1108/9781848557512-006 |
| [28] |
W. Zeng, H. Nakamura, P. Chen, A modified social force model for pedestrian behavior simulation at signalized crosswalks, Procedia-Social and Behavioral Sciences, 138 (2014), 521–530. https://doi.org/10.1016/j.sbspro.2014.07.233 doi: 10.1016/j.sbspro.2014.07.233
|
Figures(5) / Tables(3)

Irmand Mikiela, Valentina Lanza, Nathalie Verdière, Damienne Provitolo. Optimal strategies to control human behaviors during a catastrophic event[J]. AIMS Mathematics, 2022, 7(10): 18450-18466. doi: 10.3934/math.20221015







 DownLoad:
DownLoad: