In this paper, the dynamic behaviors and control strategies of a rumor propagation model are studied in multi-lingual environment. First, an S2E2I2R rumor propagation model is proposed, which incorporates a non-smooth inhibition mechanism. Meanwhile, the existence and stability of the equilibrium are analyzed, grounded in the spreader threshold of the government intervention. Finally, the optimal control and the event-triggered impulsive control strategies are proposed to mitigate the spread of rumors, and the comparison of their effectiveness is further presented by the numerical simulation and a practical case.
Citation: Jing Liao, Jinling Wang, Jiarong Li, Xin Jiang. The dynamics and control of a multi-lingual rumor propagation model with non-smooth inhibition mechanism[J]. Mathematical Biosciences and Engineering, 2024, 21(4): 5068-5091. doi: 10.3934/mbe.2024224
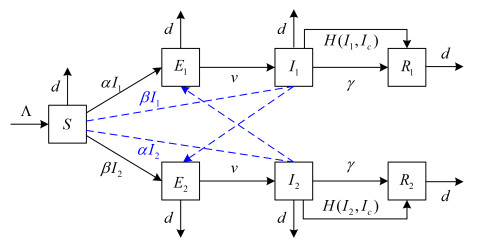
In this paper, the dynamic behaviors and control strategies of a rumor propagation model are studied in multi-lingual environment. First, an S2E2I2R rumor propagation model is proposed, which incorporates a non-smooth inhibition mechanism. Meanwhile, the existence and stability of the equilibrium are analyzed, grounded in the spreader threshold of the government intervention. Finally, the optimal control and the event-triggered impulsive control strategies are proposed to mitigate the spread of rumors, and the comparison of their effectiveness is further presented by the numerical simulation and a practical case.

| [1] | J. Liu, K. Niu, Z. He, J. Lin, Analysis of rumor spreading in communities based on modified SIR model in microblog, in Artificial Intelligence: Methodology, Systems, and Applications, Springer, 8722 (2014), 69–79. https://doi.org/10.1007/978-3-319-10554-3_7 |
| [2] |
J. Huo, H. Zhao, Dynamical analysis of a fractional SIR model with birth and death on heterogeneous complex networks, Physica A, 448 (2016), 41–56. https://doi.org/10.1016/j.physa.2015.12.078 doi: 10.1016/j.physa.2015.12.078

|
| [3] |
L. Zhu, G. Guan, Y. Li, Nonlinear dynamical analysis and control strategies of a network-based SIS epidemic model with time delay, Appl. Math. Modell., 70 (2019), 512–531. https://doi.org/10.1016/j.apm.2019.01.037 doi: 10.1016/j.apm.2019.01.037
|
| [4] | D. Daley, D. Kendall, Stochastic rumours, IMA J. Appl. Math., 1 (1965), 42–55. https://doi.org/10.1093/imamat/1.1.42 |
| [5] | D. Maki, M. Thompson, Mathematical Models and Applications, with Emphasis on Social, Life, and Management Sciences, Prentice Hall, 1973. |
| [6] |
R. Jie, J. Qiao, G. Xu, Y. Meng, A study on the interaction between two rumors in homogeneous complex networks under symmetric conditions, Physica A, 454 (2016), 129–142. https://doi.org/10.1016/j.physa.2016.02.048 doi: 10.1016/j.physa.2016.02.048
|
| [7] |
K. Kandhway, J. Kuri, How to run a campaign: Optimal control of SIS and SIR information epidemics, Appl. Math. Comput., 231 (2014), 79–92. https://doi.org/10.1016/j.amc.2013.12.164 doi: 10.1016/j.amc.2013.12.164
|
| [8] |
Q. Liu, T. Li, M. Sun, The analysis of an SEIR rumor propagation model on heterogeneous network, Physica A, 496 (2017), 372–380. https://doi.org/10.1016/j.physa.2016.11.067 doi: 10.1016/j.physa.2016.11.067
|
| [9] |
S. Dong, F. Fan, Y. Huang, Studies on the population dynamics of a rumor-spreading model in online social networks, Physica A, 482 (2018), 10–20. https://doi.org/10.1016/j.physa.2017.09.077 doi: 10.1016/j.physa.2017.09.077
|
| [10] |
Y. Moreno, M. Nekovee, A. Pacheco, Dynamics of rumor spreading in complex networks, Phys. Rev. E, 69 (2004), 066130. https://doi.org/10.1103/PhysRevE.69.066130 doi: 10.1103/PhysRevE.69.066130
|
| [11] |
W. Zhang, H. Deng, X. Li, H. Liu, Dynamics of the rumor-spreading model with control mechanism in complex network, J. Math., 2022 (2022), 5700374. https://doi.org/10.1155/2022/5700374 doi: 10.1155/2022/5700374
|
| [12] |
X. Liu, T. Li, M. Tian, Rumor spreading of a SEIR model in complex social networks with hesitating mechanism, Adv. Differ. Equations, 2018 (2018), 391. https://doi.org/10.1186/s13662-018-1852-z doi: 10.1186/s13662-018-1852-z
|
| [13] |
L. Huo, L. Wang, N. Song, C. Ma, B. He, Rumor spreading model considering the activity of spreaders in the homogeneous network, Physica A, 468 (2017), 855–865. https://doi.org/10.1016/j.physa.2016.11.039 doi: 10.1016/j.physa.2016.11.039
|
| [14] |
M. Ye, J. Li, X. Han, H. Jiang, Global analysis of a fractional-order reaction-diffusion rumor-spreading model in multi-lingual environment, Eur. Phys. J. Plus, 138 (2023), 102. https://doi.org/10.1140/epjp/s13360-023-03698-8 doi: 10.1140/epjp/s13360-023-03698-8
|
| [15] |
H. Guo, X. Yan, Y. Niu, J. Zhang, Dynamic analysis of rumor propagation model with media report and time delay on social networks, J. Appl. Math. Comput., 69 (2023), 2473–2502. https://doi.org/10.1007/s12190-022-01829-5 doi: 10.1007/s12190-022-01829-5
|
| [16] |
J. Wang, H. Jiang, T. Ma, C. Hu, Global dynamics of the multi-lingual SIR rumor spreading model with cross-transmitted mechanism, Chaos Solitons Fractals, 126 (2019), 148–157. https://doi.org/10.1016/j.chaos.2019.05.027 doi: 10.1016/j.chaos.2019.05.027
|
| [17] |
J. Li, H. Jiang, X. Mei, C. Hu, G. Zhang, Dynamical analysis of rumor spreading model in multi-lingual environment and heterogeneous complex networks, Inf. Sci., 536 (2020), 391–408. https://doi.org/10.1016/j.ins.2020.05.037 doi: 10.1016/j.ins.2020.05.037
|
| [18] |
Y. Wang, X. Yang, Y. Han, X. Wang, Spreading model with trust mechanism in complex social networks, Commun. Theor. Phys., 59 (2013), 510–516. https://doi.org/10.1088/0253-6102/59/4/21 doi: 10.1088/0253-6102/59/4/21
|
| [19] |
J. Zhang, J. Sun, Stability analysis of an SIS epidemic model with feedback mechanism on networks, Physica A, 394 (2014), 24–32. https://doi.org/10.1016/j.physa.2013.09.058 doi: 10.1016/j.physa.2013.09.058
|
| [20] |
X. Ma, S. Shen, L. Zhu, Complex dynamic analysis of a reaction-diffusion network information propagation model with non-smooth control, Inf. Sci., 622 (2023), 1141–1161. https://doi.org/10.1016/j.ins.2022.12.013 doi: 10.1016/j.ins.2022.12.013
|
| [21] |
L. Huo, L. Wang, X. Zhao, Stability analysis and optimal control of a rumor spreading model with media report, Physica A, 517 (2019), 551–562. https://doi.org/10.1016/j.physa.2018.11.047 doi: 10.1016/j.physa.2018.11.047
|
| [22] |
T. Li, Y. Guo, Nonlinear dynamical analysis and optimal control strategies for a new rumor spreading model with comprehensive interventions, Qual. Theory Dyn. Syst., 20 (2021), 84. https://doi.org/10.1007/s12346-021-00520-7 doi: 10.1007/s12346-021-00520-7
|
| [23] |
Z. He, Z. Cai, J. Yu, X. Wang, Y. Sun, Y. Li, Cost-efficient strategies for restraining rumor spreading in mobile social networks, IEEE Trans. Veh. Technol., 66 (2017), 2789–2800. https://doi.org/10.1109/TVT.2016.2585591 doi: 10.1109/TVT.2016.2585591
|
| [24] |
S. Yu, Z. Yu, H. Jiang, X. Mei, J. Li, The spread and control of rumors in a multilingual environment, Nonlinear Dyn., 100 (2020), 2933–2951. https://doi.org/10.1007/s11071-020-05621-7 doi: 10.1007/s11071-020-05621-7
|
| [25] |
J. Wang, H. Jiang, C. Hu, Z. Yu, J. Li, Stability and Hopf bifurcation analysis of multi-lingual rumor spreading model with nonlinear inhibition mechanism, Chaos Solitons Fractals, 153 (2021), 111464. https://doi.org/10.1016/j.chaos.2021.111464 doi: 10.1016/j.chaos.2021.111464
|
| [26] |
T. Gronwall, Note on the derivatives with respect to a parameter of the solutions of a system of differential equations, Ann. Math., 20 (1919), 292–296. https://doi.org/10.2307/1967124 doi: 10.2307/1967124
|
| [27] | Zhiwei Data, "Shunfeng express couriers intercept packages to sell masks" is a rumor (in Chinese), 2020. Available from: https://ef.zhiweidata.com/event/6be161c61bd1592d10027795/trend. |











Figures(12) / Tables(3)

Jing Liao, Jinling Wang, Jiarong Li, Xin Jiang. The dynamics and control of a multi-lingual rumor propagation model with non-smooth inhibition mechanism[J]. Mathematical Biosciences and Engineering, 2024, 21(4): 5068-5091. doi: 10.3934/mbe.2024224







 DownLoad:
DownLoad: