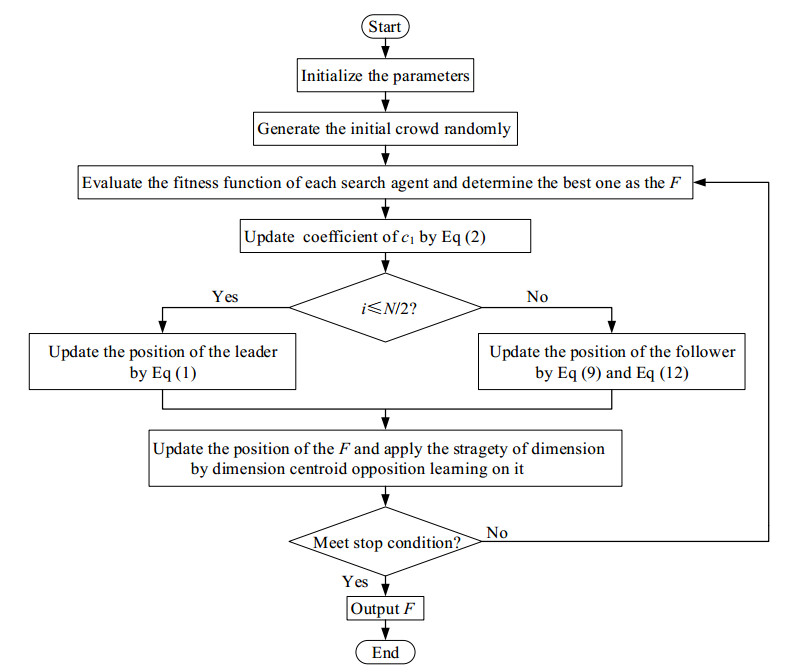
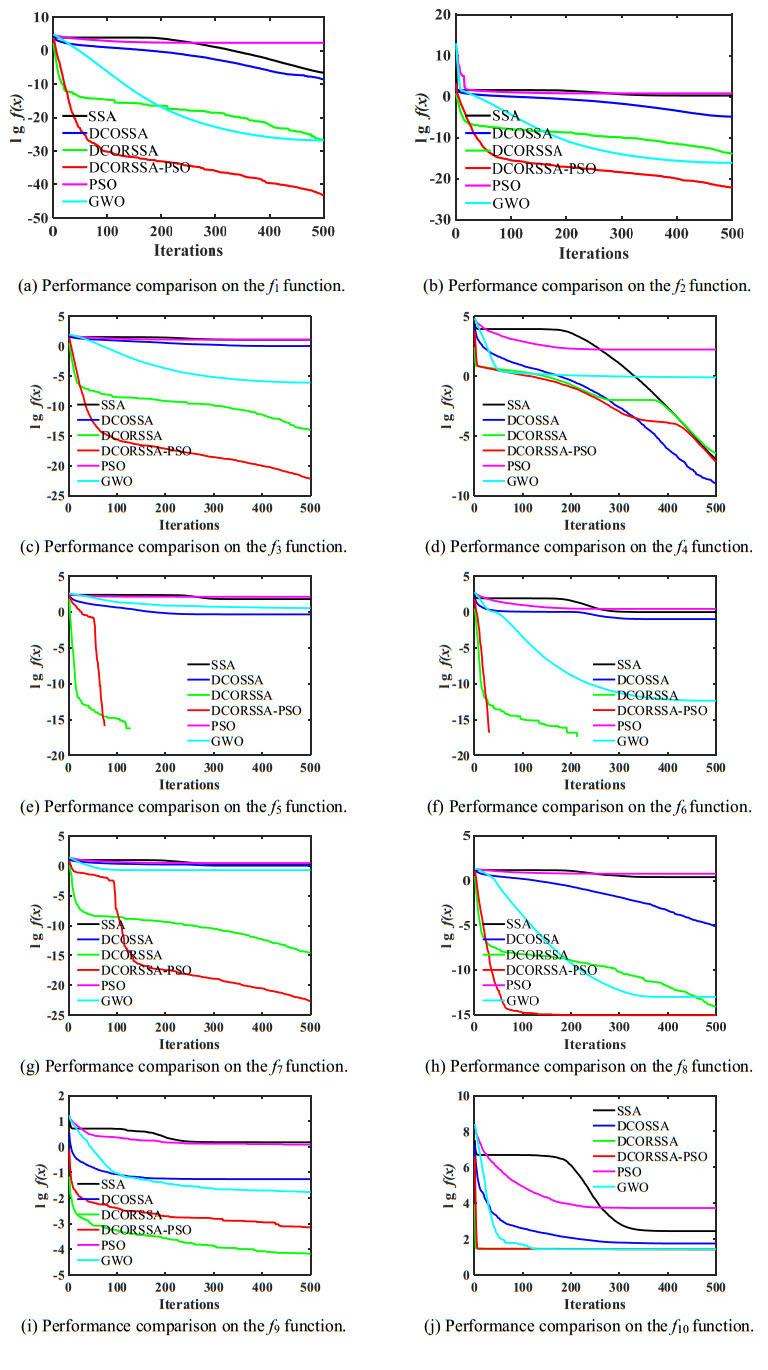
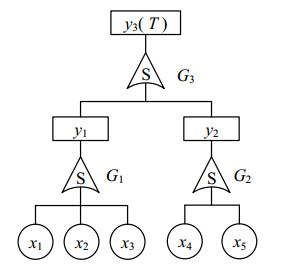
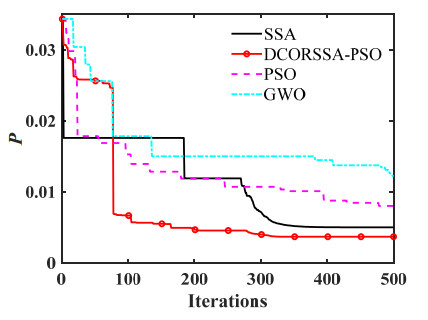
To improve the convergence speed and solution precision of the standard Salp Swarm Algorithm (SSA), a hybrid Salp Swarm Algorithm based on Dimension-by-dimension Centroid Opposition-based learning strategy, Random factor and Particle Swarm Optimization's social learning strategy (DCORSSA-PSO) is proposed. Firstly, a dimension-by-dimension centroid opposition-based learning strategy is added in the food source update stage of SSA to increase the population diversity and reduce the inter-dimensional interference. Secondly, in the followers' position update equation of SSA, constant 1 is replaced by a random number between 0 and 1 to increase the randomness of the search and the ability to jump out of local optima. Finally, the social learning strategy of PSO is also added to the followers' position update equation to accelerate the population convergence. The statistical results on ten classical benchmark functions by the Wilcoxon test and Friedman test show that compared with SSA and other well-known optimization algorithms, the proposed DCORSSA-PSO has significantly improved the precision of the solution and the convergence speed, as well as its robustness. The DCORSSA-PSO is applied to system reliability optimization design based on the T-S fault tree. The simulation results show that the failure probability of the designed system under the cost constraint is less than other algorithms, which illustrates that the application of DCORSSA-PSO can effectively improve the design level of reliability optimization.
Citation: Dongning Chen, Jianchang Liu, Chengyu Yao, Ziwei Zhang, Xinwei Du. Multi-strategy improved salp swarm algorithm and its application in reliability optimization[J]. Mathematical Biosciences and Engineering, 2022, 19(5): 5269-5292. doi: 10.3934/mbe.2022247
To improve the convergence speed and solution precision of the standard Salp Swarm Algorithm (SSA), a hybrid Salp Swarm Algorithm based on Dimension-by-dimension Centroid Opposition-based learning strategy, Random factor and Particle Swarm Optimization's social learning strategy (DCORSSA-PSO) is proposed. Firstly, a dimension-by-dimension centroid opposition-based learning strategy is added in the food source update stage of SSA to increase the population diversity and reduce the inter-dimensional interference. Secondly, in the followers' position update equation of SSA, constant 1 is replaced by a random number between 0 and 1 to increase the randomness of the search and the ability to jump out of local optima. Finally, the social learning strategy of PSO is also added to the followers' position update equation to accelerate the population convergence. The statistical results on ten classical benchmark functions by the Wilcoxon test and Friedman test show that compared with SSA and other well-known optimization algorithms, the proposed DCORSSA-PSO has significantly improved the precision of the solution and the convergence speed, as well as its robustness. The DCORSSA-PSO is applied to system reliability optimization design based on the T-S fault tree. The simulation results show that the failure probability of the designed system under the cost constraint is less than other algorithms, which illustrates that the application of DCORSSA-PSO can effectively improve the design level of reliability optimization.

| [1] |
B. Nautiyal, R. Prakash, V. Vimal, G. Liang, H. Chen, Improved salp swarm algorithm with mutation schemes for solving global optimization and engineering problems, Eng. Comput. Ger., 80 (2021), 35415-35439, https://doi.org/10.1007/s00366-020-01252-z doi: 10.1007/s00366-020-01252-z

|
| [2] |
E. H. Houssein, M. A. Mahdy, D. Shebl, A. Manzoor, R. Sarkar, W. M. Mohamed, An efficient slime mould algorithm for solving multi-objective optimization problems, Expert Syst. Appl., 187 (2022), 115870. https://doi.org/10.1016/j.eswa.2021.115870 doi: 10.1016/j.eswa.2021.115870
|
| [3] |
G. Dhiman, K. K. Singh, M. Soni, A. Nagar, M. Dehghani, A. Slowik, et al., MOSOA: A new multi-objective seagull optimization algorithm, Expert Syst. Appl., 167 (2021), 114150. https://doi.org/10.1016/j.eswa.2020.114150 doi: 10.1016/j.eswa.2020.114150
|
| [4] |
J. Xue, B. Shen, A novel swarm intelligence optimization approach: sparrow search algorithm, Syst. Sci. Control Eng., 8 (2020), 22-34. https://doi.org/10.1080/21642583.2019.1708830 doi: 10.1080/21642583.2019.1708830
|
| [5] | J. Kennedy, R. Eberhart, Particle swarm optimization, in Icnn95-international Conference on Neural Networks, 1995. https://doi.org/10.1109/ICNN.1995.488968 |
| [6] | A. Colorni, M. Dorigo, V. Maniezzo, Distributed optimization by ant colonies, in Proceedings of the first European conference on artificial life, (1991), 134-142 |
| [7] |
D. Karaboga, B. Basturk, A powerful and efficient algorithm for numerical function optimization: artificial bee colony (ABC) algorithm, J. Glob. Optim., 39 (2007), 459-471. https://doi.org/10.1007/s10898-007-9149-x doi: 10.1007/s10898-007-9149-x
|
| [8] | X. Yang, Engineering Optimization: An Introduction with Metaheuristic Application, 2010. https://doi.org/10.1002/9780470640425.ch2 |
| [9] |
S. Mirjalili, S. M. Mirjalili, A. Lewis, Grey wolf optimizer, Adv. Eng. Software, 69 (2014), 46-61. https://doi.org/10.1016/j.advengsoft.2013.12.007 doi: 10.1016/j.advengsoft.2013.12.007
|
| [10] |
G. Dhiman, V. Kumar, Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems, Knowl.-based Syst., 165 (2019), 169-196. https://doi.org/10.1016/j.knosys.2018.11.024 doi: 10.1016/j.knosys.2018.11.024
|
| [11] |
S. Li, H. Chen, M. Wang, A. A. Heidari, S. Mirjalili, Slime mould algorithm: a new method for stochastic optimization, Future Gener. Comp. Sy., 111 (2020), 300-323. https://doi.org/10.1016/j.future.2020.03.055 doi: 10.1016/j.future.2020.03.055
|
| [12] |
S. Mirjalili, A. H. Gandomi, S. Z. Mirjalili, S. Saremi, H. Faris, S. M. Mirjalili, Salp swarm algorithm: A bio-inspired optimizer for engineering design problems, Adv. Eng. Software, 114 (2017), 163-191. https://doi.org/10.1016/j.advengsoft.2017.07.002 doi: 10.1016/j.advengsoft.2017.07.002
|
| [13] |
R. A. Ibrahim, A. A. Ewees, D. Oliva, M. A. Elaziz, S. F. Lu, Improved salp swarm algorithm based on particle swarm optimization for feature selection, J. Amb. Intel. Hum. Comp., 10 (2019), 3155-3169. https://doi.org/10.1007/s12652-018-1031-9 doi: 10.1007/s12652-018-1031-9
|
| [14] | A. G. Hussien, A. E. Hassanien, E. H. Houssein, Swarming behaviour of salps algorithm for predicting chemical compound activities, in the 8th IEEE International Conference on Intelligent Computing and Information Systems (ICICIS), (2017), 315-320. https://doi.org/10.1109/intelcis.2017.8260072 |
| [15] |
S. Wang, H. Jia, X. Peng, Modified salp swarm algorithm based multilevel thresholding for color image segmentation, Math. Biosci. Eng., 17 (2020), 700-724. https://doi.org/10.3934/mbe.2020036 doi: 10.3934/mbe.2020036
|
| [16] |
S. Zhao, P. Wang, A. A. Heidari, Chen, W. He, S. Xu, Performance optimization of salp swarm algorithm for multi-threshold image segmentation: Comprehensive study of breast cancer microscopy, Comput. Biol. Med., 139 (2021), 105015. https://doi.org/10.1016/j.compbiomed.2021.105015 doi: 10.1016/j.compbiomed.2021.105015
|
| [17] |
A. M. Tudose, I. I. Picioroaga, D. O. Sidea, C. Bulac, Solving single-and multi-objective optimal reactive power dispatch problems using an improved salp swarm algorithm, Energies, 14 (2021), 1222-1222. https://doi.org/10.3390/en14051222 doi: 10.3390/en14051222
|
| [18] |
H. M. Kanoosh, E. H. Houssein, M. M. Selim, Salp swarm algorithm for node localization in wireless sensor networks, J. Comput. Netw. Commun., 2019 (2019), 1-12. https://doi.org/10.1155/2019/1028723 doi: 10.1155/2019/1028723
|
| [19] |
G. I. Sayed, G. Khoriba, M. H. Haggag, A novel chaotic salp swarm algorithm for global optimization and feature selection, Appl. Intel., 48 (2018), 3462-3481. https://doi.org/10.1007/s10489-018-1158-6 doi: 10.1007/s10489-018-1158-6
|
| [20] |
A. Abbassi, R. Abbassi, A. A. Heidari, D. Oliva, H. L. Chen, A. Habib, et al., Parameters identification of photovoltaic cell models using enhanced exploratory salp chains-based approach, Energy, 198 (2020), 117333. https://doi.org/10.1016/j.energy.2020.117333 doi: 10.1016/j.energy.2020.117333
|
| [21] |
N. Singh, L. H. Son, F. Chiclana, J. P. Magnot, A new fusion of salp swarm with sine cosine for optimization of non-linear functions, Eng. Comput. Ger., 36 (2020), 185-212. https://doi.org/10.1007/s00366-018-00696-8 doi: 10.1007/s00366-018-00696-8
|
| [22] |
M. A. Syed, R. Syed, Weighted salp swarm algorithm and its applications towards optimal sensor deployment, J. King Saud. Univ.-Com., (2019). https://doi.org/10.1016/j.jksuci.2019.07.005 doi: 10.1016/j.jksuci.2019.07.005
|
| [23] |
N. Singh, S. B. Singh, E. H. Houssein, Hybridizing salp swarm algorithm with particle swarm optimization algorithm for recent optimization functions, Evol. Intell., (2020), 1-34. https://doi.org/10.1007/s12065-020-00486-6 doi: 10.1007/s12065-020-00486-6
|
| [24] |
Q. Zhang, Z. Wang, A. A. Heidari, W. Gui, Q. Shao, H. Chen, et al. Gaussian Barebone salp swarm algorithm with stochastic fractal search for medical image segmentation: a COVID-19 case study, Comput. Biol. Med., 139 (2021), 104941. https://doi.org/10.1016/j.compbiomed.2021.104941 doi: 10.1016/j.compbiomed.2021.104941
|
| [25] |
Y. Liu, Y. Shi, H. Chen, A. Asghar Heidari, W. Gui, M. Wang, et al., Chaos-assisted multi-population salp swarm algorithms: framework and case studies, Expert Syst. Appl., 168 (2021), 114369. https://doi.org/10.1016/j.eswa.2020.114369 doi: 10.1016/j.eswa.2020.114369
|
| [26] |
H. Zhang, Z. Wang, W. Chen, A. A. Heidari, M. Wang, X. Zhao, et al., Ensemble mutation-driven salp swarm algorithm with restart mechanism: Framework and fundamental analysis, Expert Syst. Appl., 165 (2021), 113897. https://doi.org/10.1016/j.eswa.2020.113897 doi: 10.1016/j.eswa.2020.113897
|
| [27] |
S. Zhao, P. Wang, X. Zhao, H. Turabieh, M. Mafarja, H. Chen, Elite dominance scheme ingrained adaptive salp swarm algorithm: a comprehensive study, Eng. Comput. Ger., 165 (2021), 113897. https://doi.org/10.1007/s00366-021-01464-x doi: 10.1007/s00366-021-01464-x
|
| [28] |
H. Zhang, T. Liu, X. Ye, A. A. Heidari, G. Liang, H. Chen, et al, Differential evolution-assisted salp swarm algorithm with chaotic structure for real-world problems, Eng. Comput. Ger., (2022), 1-35. https://doi.org/10.1007/s00366-021-01545-x doi: 10.1007/s00366-021-01545-x
|
| [29] |
J. Xia, H. Zhang, R. Li, Z. Wang, Z. Cai, Z. Gu, et al, Adaptive barebones salp swarm algorithm with quasi-oppositional learning for medical diagnosis systems: a comprehensive analysis, J. Bionic. Eng., 19 (2022), 1-17. https://doi.org/10.1007/s42235-021-00114-8 doi: 10.1007/s42235-021-00114-8
|
| [30] |
H. Zhang, Z. Cai, X. Ye, M. Wang, F. Kuang, ·H. Chen, et al, A multi-strategy enhanced salp swarm algorithm for global optimization, Eng. Comput. Ger., 1 (2020). https://doi.org/10.1007/s00366-020-01099-4 doi: 10.1007/s00366-020-01099-4
|
| [31] |
D. H. Wolpert, W. G. Macready, No free lunch theorems for optimization, IEEE Trans. Evol. Comput., 1 (1997), 67-82. https://doi.org/10.1109/4235.585893 doi: 10.1109/4235.585893
|
| [32] |
M. M. Saafan, E. M. El-Gendy, IWOSSA: An improved whale optimization salp swarm algorithm for solving optimization problems, Expert Syst. Appl., 176 (2021), 114901. https://doi.org/10.1016/j.eswa.2021.114901 doi: 10.1016/j.eswa.2021.114901
|
| [33] | H. R. Tizhoosh, Opposition-based learning: a new scheme for machine intelligence, in International conference on computational intelligence for modelling, control and automation and international conference on intelligent agents, web technologies and internet commerce, 1 (2005), 695-701. https://doi.org/10.1109/CIMCA.2005.1631345 |
| [34] | S. Rahnamayan, J. Jesuthasan, F. Bourennani, H. Salehinejad, G. F. Naterer, Computing opposition by involving entire population, in 2014 IEEE congress on evolutionary computation (CEC), (2014), 1800-1807. https://doi.org/10.1109/CEC.2014.6900329 |
| [35] |
J. Derrac, S. García, D. Molina, F. Herrera, A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms, Swarm Evol. Comput., 1 (2011), 3-18. https://doi.org/10.1016/j.swevo.2011.02.002 doi: 10.1016/j.swevo.2011.02.002
|
| [36] |
S. García, A. Fernández, J. Luengo, F. Herrera, Advanced nonparametric tests for multiple comparisons in the design of experiments in computational intelligence and data mining: experimental analysis of power, Inf. Sci., 180 (2010), 2044-2064. https://doi.org/10.1016/j.ins.2009.12.010 doi: 10.1016/j.ins.2009.12.010
|
| [37] |
P. Jiang, J. Cheng, Q. Zhou, L. Shu, J. Hu, Variable-fidelity lower confidence bounding approach for engineering optimization problems with expensive simulations, AIAA J., 57 (2019), 5416-5430. https://doi.org/10.2514/1.J058283 doi: 10.2514/1.J058283
|
| [38] |
M. A. Mellal, E. Zio, System reliability-redundancy optimization with cold-standby strategy by an enhanced nest cuckoo optimization algorithm, Reliab. Eng. Syst. Safe, 201 (2020), 106973. https://doi.org/10.1016/j.ress.2020.106973 doi: 10.1016/j.ress.2020.106973
|
| [39] |
B. N. Chebouba, M. A. Mellal, S. Adjerid, Fuzzy multiobjective system reliability optimization by genetic algorithms and clustering analysis, Qual. Reliab. Eng. Int., 37 (2020), 1484-1503. https://doi.org/10.1002/qre.2809 doi: 10.1002/qre.2809
|
| [40] |
A. Samanta, K. Basu, A novel particle swarm optimization with fuzzy adaptive inertia weight for reliability redundancy allocation problems, Intell. Decis. Technol., 13 (2019), 91-99. https://doi.org/10.3233/IDT-190357 doi: 10.3233/IDT-190357
|
| [41] |
T. Takagi, M. Sugeno, Fuzzy identification of systems and its applications to modeling and control, IEEE T. Syst. Man CY., 15 (1985), 116-132. https://doi.org/10.1109/tsmc.1985.6313399 doi: 10.1109/tsmc.1985.6313399
|
| [42] |
H. Song, H. Zhang, C. Chan, Fuzzy fault tree analysis based on T-S model with application to INS/GPS navigation system, Soft Comput., 13 (2009): 31-40. https://doi.org/10.1007/s00500-008-0290-3 doi: 10.1007/s00500-008-0290-3
|
| [43] |
C. Yao, B Wang, D. Chen, Reliability optimization of multi-state hydraulic system based on T-S fault tree and extended PSO algorithm, IFAC Proceed. Vol., 46 (2013), 463-468. https://doi.org/10.3182/20130410-3-CN-2034.00012 doi: 10.3182/20130410-3-CN-2034.00012
|
Figures(5) / Tables(11)

Dongning Chen, Jianchang Liu, Chengyu Yao, Ziwei Zhang, Xinwei Du. Multi-strategy improved salp swarm algorithm and its application in reliability optimization[J]. Mathematical Biosciences and Engineering, 2022, 19(5): 5269-5292. doi: 10.3934/mbe.2022247







 DownLoad:
DownLoad: