Low-dose computed tomography (LDCT) can effectively reduce radiation exposure in patients. However, with such dose reductions, large increases in speckled noise and streak artifacts occur, resulting in seriously degraded reconstructed images. The non-local means (NLM) method has shown potential for improving the quality of LDCT images. In the NLM method, similar blocks are obtained using fixed directions over a fixed range. However, the denoising performance of this method is limited. In this paper, a region-adaptive NLM method is proposed for LDCT image denoising. In the proposed method, pixels are classified into different regions according to the edge information of the image. Based on the classification results, the adaptive searching window, block size and filter smoothing parameter could be modified in different regions. Furthermore, the candidate pixels in the searching window could be filtered based on the classification results. In addition, the filter parameter could be adjusted adaptively based on intuitionistic fuzzy divergence (IFD). The experimental results showed that the proposed method performed better in LDCT image denoising than several of the related denoising methods in terms of numerical results and visual quality.
Citation: Pengcheng Zhang, Yi Liu, Zhiguo Gui, Yang Chen, Lina Jia. A region-adaptive non-local denoising algorithm for low-dose computed tomography images[J]. Mathematical Biosciences and Engineering, 2023, 20(2): 2831-2846. doi: 10.3934/mbe.2023133
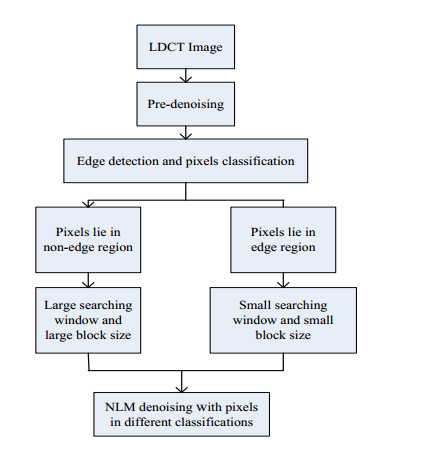
Low-dose computed tomography (LDCT) can effectively reduce radiation exposure in patients. However, with such dose reductions, large increases in speckled noise and streak artifacts occur, resulting in seriously degraded reconstructed images. The non-local means (NLM) method has shown potential for improving the quality of LDCT images. In the NLM method, similar blocks are obtained using fixed directions over a fixed range. However, the denoising performance of this method is limited. In this paper, a region-adaptive NLM method is proposed for LDCT image denoising. In the proposed method, pixels are classified into different regions according to the edge information of the image. Based on the classification results, the adaptive searching window, block size and filter smoothing parameter could be modified in different regions. Furthermore, the candidate pixels in the searching window could be filtered based on the classification results. In addition, the filter parameter could be adjusted adaptively based on intuitionistic fuzzy divergence (IFD). The experimental results showed that the proposed method performed better in LDCT image denoising than several of the related denoising methods in terms of numerical results and visual quality.

| [1] |
D. J. Brenner, E. J. Hall, Computed tomography-An increasing source of radiation exposure, N. Engl. J. Med., 357 (2007), 2277–2284. https://doi.org/10.1056/NEJMra072149 doi: 10.1056/NEJMra072149

|
| [2] |
J. A. Christner, V. A. Zavaletta, C. D. Eusemann, A. I. Walz-Flannigan, C. H. McCollough, Dose reduction in helical CT: dynamically adjustable z-axis X-ray beam collimation, AJR Am. J. Roentgenol., 194 (2010), 49–55. https://doi.org/10.2214/AJR.09.2878 doi: 10.2214/AJR.09.2878
|
| [3] |
P. Massoumzadeh, S. Don, C. F. Hildebolt, K. T. Bae, B. R. Whiting, Validation of CT dose-reduction simulation, Med. Phys., 36 (2009), 174–189. https://doi.org/10.1118/1.3031114 doi: 10.1118/1.3031114
|
| [4] |
E. Kang, J. Min, J. C. Ye, A deep convolutional neural network using directional wavelets for low-dose X-ray CT reconstruction, Med. Phys., 44 (2016), e360–e375. https://doi.org/10.1002/mp.12344 doi: 10.1002/mp.12344
|
| [5] |
H. Chen, Y. Zhang, M. K. Kalra, F. Lin, Y. Chen, P. Liao, et al., Low-dose CT with a residual encoder-decoder convolutional neural network, IEEE Trans. Med. Imaging, 36 (2017), 2524–2535. https://doi.org/10.1109/TMI.2017.2715284 doi: 10.1109/TMI.2017.2715284
|
| [6] |
Q. Yang, P. Yan, Y. Zhang, H. Yu, Y. Shi, X. Mou, et al., Low-dose CT image denoising using a generative adversarial network with Wasserstein distance and perceptual loss, IEEE Trans. Med. Imaging, 37 (2018), 1348–1357. https://doi.org/10.1109/TMI.2018.2827462 doi: 10.1109/TMI.2018.2827462
|
| [7] | K. Chen, K. Long, Y. Ren, J. Sun, X. Pu, Lesion-inspired denoising network: connecting medical image denoising and lesion detection, in Proceedings of the 29th ACM International Conference on Multimedia, (2021), 3283–3292. https://doi.org/10.1145/3474085.3475480 |
| [8] |
M. Li, Q. Du, L. Duan, X. Yang, J. Zheng, H. Jian, et al., Incorporation of residual attention modules into two neural networks for low-dose CT denoising, Med. Phys., 48 (2021), 2973−2990. https://doi.org/10.1002/mp.14856 doi: 10.1002/mp.14856
|
| [9] |
S. Bera, P. K. Biswas, Noise conscious training of non local neural network powered by self attentive spectral normalized markovian patch GAN for low dose CT denoisin, IEEE Trans. Med. Imaging, 40 (2021), 3663–3673. https://doi.org/10.1109/TMI.2021.3094525 doi: 10.1109/TMI.2021.3094525
|
| [10] |
V. Katkovnik, A. Foi, K. Egiazarian, From local kernel to nonlocal multiple-model image denoising, Int. J. Comput. Vis., 86 (2010), 1–32. https://doi.org/10.1007/s11263-009-0272-7 doi: 10.1007/s11263-009-0272-7
|
| [11] |
W. Zeng, X. Lu, Region-based non-local means algorithm for noise removal, Electron. Lett., 47 (2011), 1125–1127. https://doi.org/10.1049/el.2011.2456 doi: 10.1049/el.2011.2456
|
| [12] |
H. Zhang, J. Yang, Y. Zhang, Image and video restorations via nonlocal kernel regression, IEEE Trans. Cybern., 43 (2013), 1035–1046. https://doi.org/10.1109/TSMCB.2012.2222375 doi: 10.1109/TSMCB.2012.2222375
|
| [13] |
P. Chatterjee, P. Milanfar, Clustering-based denoising with locally learned dictionaries, IEEE Trans. Image Process., 18 (2009), 1438–1451. https://doi.org/10.1109/TIP.2009.2018575 doi: 10.1109/TIP.2009.2018575
|
| [14] | A. Buades, B. Coll, J. M. Morel, A non-local algorithm for image denoising, in 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05), IEEE, USA, (2005), 60–65. https://doi.org/10.1109/CVPR.2005.38 |
| [15] | Y. Liu, Y. Chen, W. Chen, L. Luo, X. Yin, Improving low-dose X-ray CT images by weighted intensity averaging over large-scale neighborhoods, in Medical Image Analysis and Clinical Applications (MIACA), 2010. https://doi.org/10.1109/MIACA.2010.5528271 |
| [16] |
Z. Yang, C. Toumoulin, Y. Chen, Y. Hu, Y. Zhu, Y. Li, et al., Thoracic low-dose CT image processing using an artifact suppressed large-scale nonlocal means, Phys. Med. Biol., 57 (2012), 2667–2688. https://doi.org/10.1088/0031-9155/57/9/2667 doi: 10.1088/0031-9155/57/9/2667
|
| [17] |
Z. Li, L. Yu, J. D. Trzasko, D. S. Lake, D. J. Blezek, J. G. Fletcher, et al., Adaptive nonlocal means filtering based on local noise level for CT denoising, Med. Phys., 41 (2014), 011908. https://doi.org/10.1118/1.4851635 doi: 10.1118/1.4851635
|
| [18] |
Y. Zhang, H. Lu, J. Rong, J. Meng, J. Shang, P. Ren, et al., Adaptive non-local means on local principle neighborhood for noise/artifacts reduction in low-dose CT images, Med. Phys., 44 (2017), e230–e241. https://doi.org/10.1002/mp.12388 doi: 10.1002/mp.12388
|
| [19] |
C. A. Deledalle, V. Duval, J. Salmon, Non-local methods with shape-adaptive patches (NLM-SAP), J. Math. Imaging Vis., 43 (2012), 103–120. https://doi.org/10.1007/s10851-011-0294-y doi: 10.1007/s10851-011-0294-y
|
| [20] |
F. Khellah, Textured image denoising using dominant neighborhood structure, Arab. J. Sci. Eng., 39 (2014), 3759–3770. https://doi.org/10.1007/s13369-014-1057-z doi: 10.1007/s13369-014-1057-z
|
| [21] |
H. Yu, A. Li, Real-time non-local means image denoising algorithm based on local binary descriptor, KSII Trans. Internet Inf. Syst., 10 (2016), 825–836. https://doi.org/10.3837/tiis.2016.02.021 doi: 10.3837/tiis.2016.02.021
|
| [22] | R. Verma, R. Pandey, Nonlocal means algorithm with adaptive isotropic search window size for image denoising, in 2015 Annual IEEE India Conference (INDICON), (2016). https://doi.org/10.1109/INDICON.2015.7443193 |
| [23] |
J. Liu, R. Liu, Y. Wang, J. Chen, Y. Yang, D. Ma, Image denoising searching similar blocks along edge directions, Signal Process. Image Commun., 57 (2017), 33–45. https://doi.org/10.1016/j.image.2017.05.001 doi: 10.1016/j.image.2017.05.001
|
| [24] |
L. Rudin, S. Osher, E. Fatemi, Nonlinear total variation-based noise removal algorithms, Physica D, 60 (1992), 259–268. https://doi.org/10.1016/0167-2789(92)90242-F doi: 10.1016/0167-2789(92)90242-F
|
| [25] | C. McCollough, B. Chen, D. R. Holmes Ⅲ, X. Duan, Z. Yu, L. Yu, et al., Low dose CT image and projection data (LDCT-and-Projection-data) (Version 4)[Data set], The Cancer Imaging Archive, 2020. https://doi.org/10.7937/9NPB-2637 |









Figures(10) / Tables(3)

Pengcheng Zhang, Yi Liu, Zhiguo Gui, Yang Chen, Lina Jia. A region-adaptive non-local denoising algorithm for low-dose computed tomography images[J]. Mathematical Biosciences and Engineering, 2023, 20(2): 2831-2846. doi: 10.3934/mbe.2023133







 DownLoad:
DownLoad: