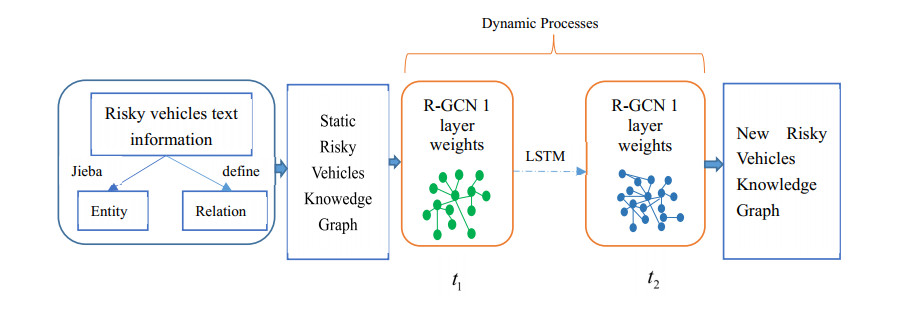
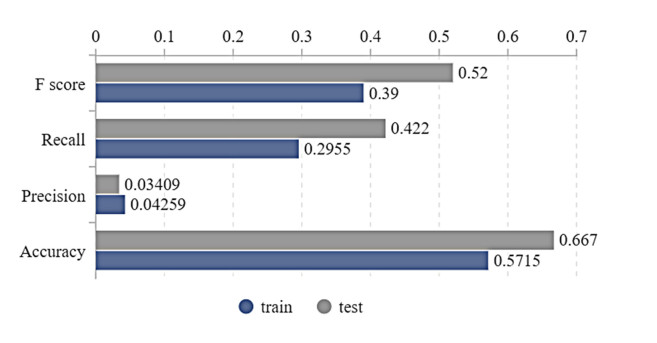
The growth of the Internet of Things makes it possible to share information on risky vehicles openly and freely. How to create dynamic knowledge graphs of continually changing risky vehicles has emerged as a crucial technology for identifying risky vehicles, as well as a research hotspot in both artificial intelligence and field knowledge graphs. The node information of the risky vehicle knowledge graph is not rich, and the graph structure plays a major role in its dynamic changes. The paper presents a fusion algorithm based on relational graph convolutional network (R-GCN) and Long Short-Term Memory (LSTM) to build the dynamic knowledge graph of risky vehicles and conducts a comparative experiment on the link prediction task. The results showed that the fusion algorithm based on R-GCN and LSTM had better performance than the other methods such as GCN, DynGEM, ROLAND, and RE-GCN, with the MAP value of 0.2746 and the MRR value of 0.1075. To further verify the proposed algorithm, classification experiments are carried out on the risky vehicle dataset. Accuracy, precision, recall, and F-values were used as heat-tolerance evaluation indexes in classification experiments, the values were 0.667, 0.034, 0.422, and 0.52 respectively.
Citation: Yongmei Zhang, Zhirong Du, Lei Hu. A construction method of urban road risky vehicles based on dynamic knowledge graph[J]. Electronic Research Archive, 2023, 31(7): 3776-3790. doi: 10.3934/era.2023192
The growth of the Internet of Things makes it possible to share information on risky vehicles openly and freely. How to create dynamic knowledge graphs of continually changing risky vehicles has emerged as a crucial technology for identifying risky vehicles, as well as a research hotspot in both artificial intelligence and field knowledge graphs. The node information of the risky vehicle knowledge graph is not rich, and the graph structure plays a major role in its dynamic changes. The paper presents a fusion algorithm based on relational graph convolutional network (R-GCN) and Long Short-Term Memory (LSTM) to build the dynamic knowledge graph of risky vehicles and conducts a comparative experiment on the link prediction task. The results showed that the fusion algorithm based on R-GCN and LSTM had better performance than the other methods such as GCN, DynGEM, ROLAND, and RE-GCN, with the MAP value of 0.2746 and the MRR value of 0.1075. To further verify the proposed algorithm, classification experiments are carried out on the risky vehicle dataset. Accuracy, precision, recall, and F-values were used as heat-tolerance evaluation indexes in classification experiments, the values were 0.667, 0.034, 0.422, and 0.52 respectively.

| [1] | Made in China 2025, Issued by the State Council. |
| [2] | Y. C. Zou, Construction and Application of Traffic Knowledge Graph Based on Multi-source Data Fusion (in Chinese), Master's thesis, Dalian University of Technology, 2020. Available from: https://cdmd.cnki.com.cn/Article/CDMD-10141-1020653436.htm. |
| [3] | L. Wang, Research on Intelligent Knowledge Support of Urban Rail Transit Construction Safety Management Based on Knowledge Graph (in Chinese), Ph.D thesis, China University of Mining and Technology, 2019. https://doi.org/10.27623/d.cnki.gzkyu.2019.000408 |
| [4] | G. L. Zhou, Research on Prediction of Urban Traffic Congestion Area Based on Knowledge Graph and Deep Learning (in Chinese), Master's thesis, University of Science and Techno-logy of China, 2019. Available from: https://kns.cnki.net/kcms2/article/abstract?v = 3uoqIhG8C475KOm_zrgu4lQARvep2SAkOsSuGHvNoCRcTRpJSuXuqaqG2zp1ftApp1d23kvjOO2oSeVFvORibKCV9PhY0Iws & uniplatform = NZKPT & src = copy. |
| [5] | M. Zhou, Study on Vehicle Lane Change Risk Situation Based on Driving Behavior and Driving Style Inclination (in Chinese), Chang'an University, 2022. https://doi.org/10.26976/d.cnki.gchau.2022.000496 |
| [6] |
S. Pantangi, G. Fountas, P. Anastasopoulos, J. Pierowicz, K. Majka, A. Blatt, Do High Visibility Enforcement programs affect aggressive driving behavior? An empirical analysis using Naturalistic Driving Study data, Accid. Anal. Prev., 138 (2020), 105361. https://doi.org/10.1016/j.aap.2019.105361 doi: 10.1016/j.aap.2019.105361

|
| [7] |
P. Sârbescu, A. Rusu, Personality predictors of speeding: anger-aggression and impulsive-Sensation Seeking. A systematic review and meta-analysis, J. Saf. Res., 77 (2021), 86−98. https://doi.org/10.1016/j.jsr.2021.02.004 doi: 10.1016/j.jsr.2021.02.004
|
| [8] |
J. Kovaceva, I. Isaksson-Hellman, N. Murgovski, Identification of aggressive driving from naturalistic data in car-following situations, J. Saf. Res., 73 (2020), 225−234. https://doi.org/10.1016/j.jsr.2020.03.003 doi: 10.1016/j.jsr.2020.03.003
|
| [9] |
Y. Xu, S. Bao, A. K. Pradhan, Modeling drivers' reaction when being tailgated: a random forests method, J. Saf. Res., 78 (2021), 28−35. https://doi.org/10.1016/j.jsr.2021.05.004 doi: 10.1016/j.jsr.2021.05.004
|
| [10] | Y. Dai, Research and Application of Risk Assessment of Dangerous Goods Road Transport Vehicles Based on Hierarchical Fuzzy Network Model (in Chinese), Chang'an University, 2022. https://doi.org/10.26976/d.cnki.gchau.2022.002093 |
| [11] | Q. Yang, Research on the Risk Analysis Method of Lane Change on Expressway Vehicles (in Chinese), The People's Public Security University of China, 2022. https://doi.org/10.27634/d.cnki.gzrgu.2022.000006 |
| [12] | K. Han, Research on the Video Detection Method for Violations of not Driving in the Guide Lane (in Chinese), Nanjing University of Science and Technology, 2019. https://doi.org/10.27241/d.cnki.gnjgu.2019.001552 |
| [13] |
Y. N. Cui, J. Li, L. Shen, Y. Shen, L. Qiao, J. Bo, Duration-HyTE: A Time-aware knowledge representation learning method based on duration modeling, J. Comput. Res. Dev., 57 (2020), 1239–1251. https://doi.org/10.7544/issn1000-1239.2020.20190253 doi: 10.7544/issn1000-1239.2020.20190253
|
| [14] | M. Belkin, P. Niyogi, Laplacian eigenmaps and spectral techniques for embedding and clustering, in Advances in Neural Information Processing Systems, 2002. Available from: https://papers.nips.cc/paper/2001/file/f106b7f99d2cb30c3db1c3cc0fde9ccb-Paper.pdf. |
| [15] |
S. T. Roweis, L. K. Saul, Nonlinear dimensionality reduction by locally linear embedding, Science, 290 (2000), 2323–2326. https://doi.org/10.1126/science.290.5500.2323 doi: 10.1126/science.290.5500.2323
|
| [16] | J. Li, H. Dani, X. Hu, J. Tang, Y. Chang, H. Liu, Attributed network embedding for learning in a dynamic environment, in Proceedings of the 2017 ACM Conference on Information and Knowledge Management, (2017), 387−396. https://doi.org/10.1145/3132847.3132919 |
| [17] | G. H. Nguyen, J. B. Lee, R. A. Rossi, N. K. Ahmed, E. Koh, S. Kim, Continuous-time dynamic network embeddings, in Companion Proceedings of the Web Conference 2018, (2018), 969−976. https://doi.org/10.1145/3184558.3191526 |
| [18] | W. Yu, W. Cheng, C. Aggarwal, K. Zhang, H. Chen, W. Wang, NetWalk: A flexible deep embedding approach for anomaly detection in dynamic networks, in Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, (2018), 2672−2681. https://doi.org/10.1145/3219819.3220024 |
| [19] | R. Trivedi, M. Farajtabar, P. Biswal, H. Zha, Representation learning over dynamic graphs, preprint, arXiv: 1803.04051. |
| [20] | Y. Zuo, G. Liu, H. Lin, J. Guo, X. Hu, J. Wu, Embedding temporal network via neighborhood formation, in Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, (2018), 2857–2866. https://doi.org/10.1145/3219819.3220054 |
| [21] |
B. Lyu, Y. Yang, S. Wen, T. Huang, K. Li, Neural architecture search for portrait parsing, IEEE Trans. Neural Networks Learn. Syst., 34 (2023), 1112−1121. https://doi.org/10.1109/TNNLS.2021.3104872 doi: 10.1109/TNNLS.2021.3104872
|
| [22] |
W. Li, S. Wen, K. Shi, Y. Yang, T. Huang, Neural architecture search with a lightweight transformer for text-to-image synthesis, IEEE Trans. Network Sci. Eng., 9(2022), 1567−1576. https://doi.org/10.1109/TNSE.2022.3147787 doi: 10.1109/TNSE.2022.3147787
|
| [23] | W. Kipf, M. Welling, Semi-supervised classification with graph convolutional networks, preprint, arXiv: 1609.02907. |
| [24] |
B. Lyu, M. Hamdi, Y. Yang, Y. Cao, Z. Yan, K. Li, et al., Efficient spectral graph convolutional network deployment on memristive crossbars, IEEE Trans. Emerging Top. Comput. Intell., 7 (2022), 415−425. https://doi.org/10.1109/TETCI.2022.3210998 doi: 10.1109/TETCI.2022.3210998
|
| [25] |
B. Lyu, S. Wen, K. Shi, T. Huang, Multiobjective reinforcement learning-based neural architecture search for efficient portrait parsing, IEEE Trans. Cybern. , 53 (2021), 1158−1169. https://doi.org/10.1109/TCYB.2021.3104866 doi: 10.1109/TCYB.2021.3104866
|
| [26] |
J. Zhu, X. Han, H. Deng, C. Tao, L. Zhao, P. Wang, et al., KST-GCN: A knowledge-driven spatial-temporal graph convolutional network for traffic forecasting, IEEE Trans. Intell. Transp. Syst., 23 (2022), 15055–15065. https://doi.org/10.1109/TITS.2021.3136287 doi: 10.1109/TITS.2021.3136287
|
| [27] | Y. Fu, S. Okada, L. Wang, L. Guo, Y. Song, J. Liu, et al., CONSK-GCN: Conversational semantic- and knowledge-oriented graph convolutional network for multimodal emotion recognition, in 2021 IEEE International Conference on Multimedia and Expo (ICME), (2021), 1–6. https://doi.org/10.1109/ICME51207.2021.9428438 |
| [28] | J. Yang, W. Zhou, L. Wei, J. Lin, J. Han, S. Hu, RE-GCN: Relation enhanced graph convolutional network for entity alignment in heterogeneous knowledge graphs, in Database Systems for Advanced Applications, 12113 (2020), 432–447. https://doi.org/10.1007/978-3-030-59416-9_26 |
| [29] | Z. Liu, Z. D. Jiang, F. Wei, OD-GCN object detection by knowledge graph with GCN, preprint, arXiv: 1908.04385v1. |
| [30] |
L. Zhao, Y. Song, C. Zhang, Y. Liu, P. Wang, T. Lin, et al., T-GCN: A temporal graph convolutional network for traffic prediction, IEEE Trans. Intell. Transp. Syst., 21 (2020), 3848–3858. https://doi.org/10.1109/TITS.2019.2935152. doi: 10.1109/TITS.2019.2935152
|
| [31] | S. Abu-El-Haija, A. Kapoor, B. Perozzi, J. Lee, N-GCN: Multi-scale graph convolution for semi-supervised node classification, in Proceedings of the 35th Uncertainty in Artificial Intelligence Conference, 115 (2020), 841–851. Available from: http://proceedings.mlr.press/v115/abu-el-haija20a.html. |
| [32] | A. Pareja, G. Domeniconi, J. Chen, T. Ma, T. Suzumura, H. Kanezashi, et al., EvolveGCN: Evolving graph convolutional networks for dynamic graphs, in Proceedings of the AAAI Conference on Artificial Intelligence, 34 (2020), 5363−5370. https://doi.org/10.1609/aaai.v34i04.5984 |
| [33] | P. Goyal, N. Kamra, X. He, Y. Liu, DynGEM: Deep embedding method for dynamic graphs, preprint, arXiv: 1805.11273. |
| [34] | Z. Li, X. Jin, W. Li, S. Guan, J. Guo, H. Shen, et al., Temporal knowledge graph reasoning based on evolutional representation learning, in Proceedings of the 44th International ACM SIGIR Conference on Research and Development in Information Retrieval, (2021), 408–417. https://doi.org/10.1145/3404835.3462963 |
| [35] | J. Li, Z. Han, H. Cheng, J. Su, Predicting path failure in time-evolving graphs, in the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, (2019), 1279–1289. https://doi.org/10.1145/3292500.3330847 |
| [36] |
H. Peng, H. Wang, B. Du, M. Z. A. Bhuiyan, H. Ma, J. Liu, et al., Spatial temporal incidence dynamic graph neural networks for traffic flow forecasting, Inf. Sci., 521 (2020), 277–290. https://doi.org/10.1016/j.ins.2020.01.043 doi: 10.1016/j.ins.2020.01.043
|
| [37] | A. Taheri, K. Gimpel, T. Berger-Wolf, Learning to represent the evolution of dynamic graphs with recurrent models, in Companion Proceedings of the 2019 World Wide Web Conference, (2019), 301−307. https://doi.org/10.1145/3308560.3316581 |
| [38] | X. Wang, Y. Ma, Y. Wang, W. Jin, X. Wang, J. Tang, et al., Traffic flow prediction via spatial temporal graph neural network, in Proceedings of the Web Conference 2020, (2020), 1082−1092. https://doi.org/10.1145/3366423.3380186 |
| [39] | B. Yu, H. Yin, Z. Zhu, Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting, in International Joint Conference on Artificial Intelligence (IJCAI), 2018. Available from: https://www.ijcai.org/Proceedings/2018/0505.pdf. |
| [40] | J. You, T. Du, J. Leskovec, ROLAND: Graph learning framework for dynamic graphs, in Proceedings of the 28th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, (2022), 2358–2366. https://doi.org/10.1145/3534678.3539300 |
| [41] | Road Traffic Safety Law of the People's Republic of China, The fifth meeting of the Standing Committee of the Tenth National People's Congress. |
| [42] | M. S. S. Thomas, N. Kipf, P. Bloem, R. van den Berg, I. Titov, M. Welling, Modeling relational data with graph convolutional networks, in The Semantic Web, 10843(2018), 593–607. https://doi.org/10.1007/978-3-319-93417-4_38 |
Figures(3) / Tables(2)
Yongmei Zhang, Zhirong Du, Lei Hu. A construction method of urban road risky vehicles based on dynamic knowledge graph[J]. Electronic Research Archive, 2023, 31(7): 3776-3790. doi: 10.3934/era.2023192







 DownLoad:
DownLoad: