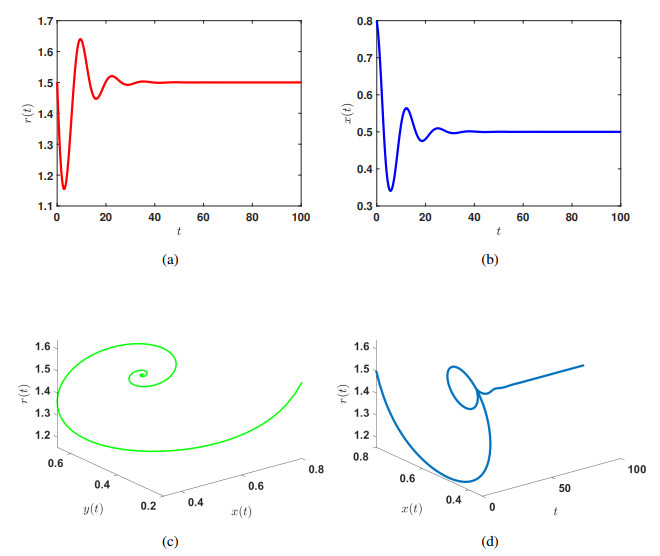
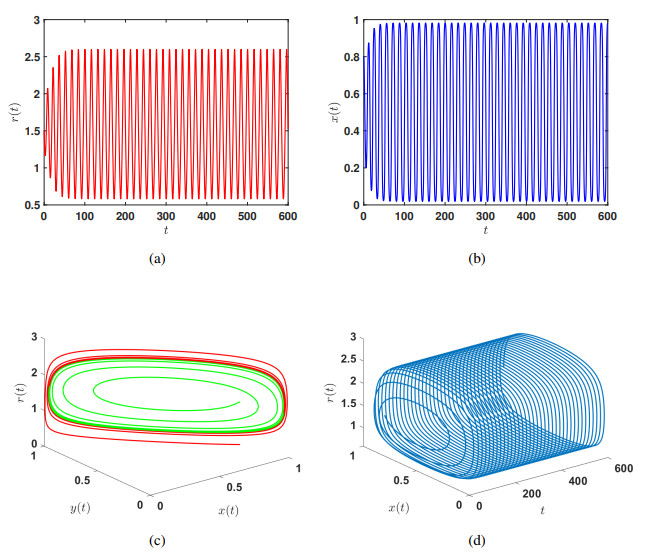
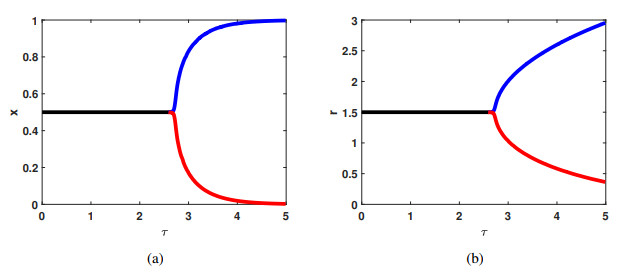
Rewarding cooperators and punishing defectors are effective measures for promoting cooperation in evolutionary game theory. Given that previous models treated rewards as constants, this does not reflect real-world dynamics changes. Therefore, this paper focused on the classical payoff matrix and examined the dynamic variable rewards affected by cooperation and defection strategies, as well as the impact of time delays. First, for the system without a time delay, we analyzed the existence and stability of numerous equilibrium points and explored transcritical bifurcations under various conditions. Second, for the time-delay system, we discussed a series of delayed dynamical behaviors including Hopf bifurcation, period, and the stability and direction of bifurcation. Finally, the changes of cooperation strategy were observed by numerical simulation, and some interesting results were obtained: (ⅰ) Under certain circumstances, even if the reward given to the cooperators reaches the maximum, the proportion of cooperators is still zero, which means that increasing rewards does not always promote cooperation. (ⅱ) The initial state can affect the choice of cooperation strategy and defection strategy. (ⅲ) The increase of the time delay makes the stable equilibrium point disappear and forms a stable limit cycle.
Citation: Haowen Gong, Huijun Xiang, Yifei Wang, Huaijin Gao, Xinzhu Meng. Strategy evolution of a novel cooperative game model induced by reward feedback and a time delay[J]. AIMS Mathematics, 2024, 9(11): 33161-33184. doi: 10.3934/math.20241583
Rewarding cooperators and punishing defectors are effective measures for promoting cooperation in evolutionary game theory. Given that previous models treated rewards as constants, this does not reflect real-world dynamics changes. Therefore, this paper focused on the classical payoff matrix and examined the dynamic variable rewards affected by cooperation and defection strategies, as well as the impact of time delays. First, for the system without a time delay, we analyzed the existence and stability of numerous equilibrium points and explored transcritical bifurcations under various conditions. Second, for the time-delay system, we discussed a series of delayed dynamical behaviors including Hopf bifurcation, period, and the stability and direction of bifurcation. Finally, the changes of cooperation strategy were observed by numerical simulation, and some interesting results were obtained: (ⅰ) Under certain circumstances, even if the reward given to the cooperators reaches the maximum, the proportion of cooperators is still zero, which means that increasing rewards does not always promote cooperation. (ⅱ) The initial state can affect the choice of cooperation strategy and defection strategy. (ⅲ) The increase of the time delay makes the stable equilibrium point disappear and forms a stable limit cycle.

| [1] | J. W. Weibull, Evolutionary game theory, MIT press, 1997. |
| [2] |
K. Sigmund, M. A. Nowak, Evolutionary game theory, Curr. Biol., 9 (1999), R503–R505. https://doi.org/10.1016/S0960-9822(99)80321-2 doi: 10.1016/S0960-9822(99)80321-2

|
| [3] |
P. Avila, C. Mullon, Evolutionary game theory and the adaptive dynamics approach: Adaptation where individuals interact, Philos. T. R. Soc. B, 378 (2023), 20210502. https://doi.org/10.1098/rstb.2021.0502 doi: 10.1098/rstb.2021.0502
|
| [4] |
B. Pi, Y. Li, M. Feng, An evolutionary game with conformists and profiteers regarding the memory mechanism, Physica A, 597 (2022), 127297. https://doi.org/10.1016/j.physa.2022.127297 doi: 10.1016/j.physa.2022.127297
|
| [5] |
J. M. Smith, G. R. Price, The logic of animal conflict, Nature, 246 (1973), 15–18. https://doi.org/10.1038/246015a0 doi: 10.1038/246015a0
|
| [6] | R. Selten, A note on evolutionarily stable strategies in asymmetric animal conflicts, In: Models of strategic rationality, Dordrecht: Springer, 1988. https://doi.org/10.1007/978-94-015-7774-8_3 |
| [7] |
J. F. Nash Jr, Equilibrium points in n-person games, P. Natl. Acad. Sci., 36 (1950), 48–49. https://doi.org/10.1073/pnas.36.1.48 doi: 10.1073/pnas.36.1.48
|
| [8] |
M. Feng, B. Pi, L. J. Deng, J. Kurths, An evolutionary game with the game transitions based on the Markov process, IEEE T. Syst. Man Cy. Syst., 54 (2024), 609–621. https://doi.org/10.1109/TSMC.2023.3315963 doi: 10.1109/TSMC.2023.3315963
|
| [9] |
J. Pi, G. Yang, H. Yang, Evolutionary dynamics of cooperation in N-person snowdrift games with peer punishment and individual disguise, Physica A, 592 (2022), 126839. https://doi.org/10.1016/j.physa.2021.126839 doi: 10.1016/j.physa.2021.126839
|
| [10] |
P. Zhu, H. Guo, H. Zhang, Y. Han, Z. Wang, C. Chu, The role of punishment in the spatial public goods game, Nonlinear Dyn., 102 (2020), 2959–2968. https://doi.org/10.1007/s11071-020-05965-0 doi: 10.1007/s11071-020-05965-0
|
| [11] | F. Vega-Redondo, Economics and the theory of games, Cambridge university press, 2003. |
| [12] |
F. Ahmad, Z. Shah, L. Al-Fagih, Applications of evolutionary game theory in urban road transport network: A state of the art review, Sustain. Cities Soc., 98 (2023), 104791. https://doi.org/10.1016/j.scs.2023.104791 doi: 10.1016/j.scs.2023.104791
|
| [13] |
H. Coggan, K. M. Page, The role of evolutionary game theory in spatial and non-spatial models of the survival of cooperation in cancer: a review, J. R. Soc. Interface, 19 (2022), 20220346. https://doi.org/10.1098/rsif.2022.0346 doi: 10.1098/rsif.2022.0346
|
| [14] |
C. Hauert, C. Saade, A. McAvoy, Asymmetric evolutionary games with environmental feedback, J. Theor. Biol., 462 (2019), 347–360. https://doi.org/10.1016/j.jtbi.2018.11.019 doi: 10.1016/j.jtbi.2018.11.019
|
| [15] | J. S. Weitz, C. Eksin, K. Paarporn, S. P. Brown, W. C. Ratcliff, Replicator dynamics with feedback-evolving games: Towards a co-evolutionary game theory, bioRxiv, 2016, 043299. |
| [16] |
H. Cheng, X. Meng, T. Hayat, A. Hobiny, T. Zhang, Stability and bifurcation analysis for a nitrogen-fixing evolutionary game with environmental feedback and discrete delays, Int. J. Bifurcat. Chaos, 32 (2022), 2250027. https://doi.org/10.1142/S0218127422500274 doi: 10.1142/S0218127422500274
|
| [17] |
A. G. Yabo, J. B. Caillau, J. L. Gouzé, Optimal bacterial resource allocation: metabolite production in continuous bioreactors, Math. Biosci. Eng., 17 (2020), 7074–7100. https://doi.org/10.3934/mbe.2020364 doi: 10.3934/mbe.2020364
|
| [18] |
J. Zhang, M. Cao, Strategy competition dynamics of multi-agent systems in the framework of evolutionary game theory, IEEE T. Circuits II, 67 (2020), 152–156. https://doi.org/10.1109/TCSII.2019.2910893 doi: 10.1109/TCSII.2019.2910893
|
| [19] |
Q. Meng, Y. Liu, Z. Li, C. Wu, Dynamic reward and penalty strategies of green building construction incentive: an evolutionary game theory-based analysis, Environ. Sci. Pollut. Res., 28 (2021), 44902–44915. https://doi.org/10.1007/s11356-021-13624-z doi: 10.1007/s11356-021-13624-z
|
| [20] |
X. Li, H. Wang, C. Xia, M. Perc, Effects of reciprocal rewarding on the evolution of cooperation in voluntary social dilemmas, Front. Phys., 7 (2019), 125. https://doi.org/10.3389/fphy.2019.00125 doi: 10.3389/fphy.2019.00125
|
| [21] |
X. Xiong, Z. Zeng, M. Feng, A. Szolnoki, Coevolution of relationship and interaction in cooperative dynamical multiplex networks, Chaos, 34 (2024), 023118. https://doi.org/10.1063/5.0188168 doi: 10.1063/5.0188168
|
| [22] |
Z. Zeng, Q. Li, M. Feng, Spatial evolution of cooperation with variable payoffs, Chaos, 32 (2022), 073118. https://doi.org/10.1063/5.0099444 doi: 10.1063/5.0099444
|
| [23] |
Y. Zhang, Y. Lu, H. Jin, Y. Dong, C. Du, L. Shi, The impact of dynamic reward on cooperation in the spatial public goods game, Chaos Soliton. Fract., 187 (2024), 115456. https://doi.org/10.1016/j.chaos.2024.115456 doi: 10.1016/j.chaos.2024.115456
|
| [24] |
Q. Zhu, Stabilization of stochastic nonlinear delay systems with exogenous disturbances and the event-triggered feedback control, IEEE T. Automat. Contr., 64 (2019), 3764–3771. https://doi.org/10.1109/TAC.2018.2882067 doi: 10.1109/TAC.2018.2882067
|
| [25] |
Y. Zhao, H. Lin, X. Qiao, Persistence, extinction and practical exponential stability of impulsive stochastic competition models with varying delays, AIMS Math., 8 (2023), 22643–22661. https://doi.org/10.3934/math.20231152 doi: 10.3934/math.20231152
|
| [26] |
Y. Umezuki, Bifurcation analysis of the rock-paper-scissors game with discrete-time logit dynamics, Math. Soc. Sci., 95 (2018), 54–65. https://doi.org/10.1016/j.mathsocsci.2017.12.001 doi: 10.1016/j.mathsocsci.2017.12.001
|
| [27] |
J. Miekisz, S. Wesolowski, Stochasticity and time delays in evolutionary games, Dyn. Games Appl., 1 (2011), 440–448. https://doi.org/10.1007/s13235-011-0028-1 doi: 10.1007/s13235-011-0028-1
|
| [28] |
K. Hu, Z. Li, L. Shi, M. Perc, Evolutionary games with two species and delayed reciprocity, Nonlinear Dyn., 111 (2023), 7899–7910. https://doi.org/10.1007/s11071-023-08231-1 doi: 10.1007/s11071-023-08231-1
|
| [29] |
F. Yan, X. Chen, Z. Qiu, A. Szolnoki, Cooperator driven oscillation in a time-delayed feedback-evolving game, New J. Phys., 23 (2021), 053017. https://doi.org/10.1088/1367-2630/abf205 doi: 10.1088/1367-2630/abf205
|
| [30] |
A. A. Shaikh, H. Das, N. Ali, Complex dynamics of an eco-epidemic system with disease in prey species, Int. J. Bifurcat. Chaos, 31 (2021), 2150046. https://doi.org/10.1142/S0218127421500462 doi: 10.1142/S0218127421500462
|
| [31] |
Y. Qu, J. Wei, Bifurcation analysis in a time-delay model for prey-predator growth with stage-structure, Nonlinear Dyn., 49 (2007), 285–294. https://doi.org/10.1007/s11071-006-9133-x doi: 10.1007/s11071-006-9133-x
|
| [32] |
T. Yi, W. Zuwang, Effect of time delay and evolutionarily stable strategy, J. Theor. Biol., 187 (1997), 111–116. https://doi.org/10.1006/jtbi.1997.0427 doi: 10.1006/jtbi.1997.0427
|
| [33] |
N. Ben-Khalifa, R. El-Azouzi, Y. Hayel, Discrete and continuous distributed delays in replicator dynamics, Dyn. Games Appl., 8 (2018), 713–732. https://doi.org/10.1007/s13235-017-0225-7 doi: 10.1007/s13235-017-0225-7
|
| [34] |
I. S. Kohli, M. C. Haslam, An analysis of the replicator dynamics for an asymmetric Hawk‐Dove game, Int. J. Differ. Equat., 2017 (2017), 8781570. https://doi.org/10.1155/2017/8781570 doi: 10.1155/2017/8781570
|
| [35] |
J. Ke, P. P. Li, Z. Lin, Dissatisfaction-driven replicator dynamics of the evolutionary snowdrift game in structured populations, Physica A, 587 (2022), 126478. https://doi.org/10.1016/j.physa.2021.126478 doi: 10.1016/j.physa.2021.126478
|
| [36] | J. Sotomayor, Generic bifurcations of dynamical systems, Dynamical systems, Academic Press, 1973. https://doi.org/10.1016/B978-0-12-550350-1.50047-3 |
| [37] |
Y. Song, J. Wei, Bifurcation analysis for Chen's system with delayed feedback and its application to control of chaos, Chaos Soliton. Fract., 22 (2004), 75–91. https://doi.org/10.1016/j.chaos.2003.12.075 doi: 10.1016/j.chaos.2003.12.075
|
| [38] | Q. Zhu, Event-triggered sampling problem for exponential stability of stochastic nonlinear delay systems driven by Le´vy processes, IEEE T. Automat. Contr., 2024. https://doi.org/10.1109/TAC.2024.3448128 |
| [39] |
Z. Jia, C. Li, Almost sure exponential stability of uncertain stochastic Hopfield neural networks based on subadditive measures, Mathematics, 11 (2023), 3110. https://doi.org/10.3390/math11143110 doi: 10.3390/math11143110
|
| [40] |
H. Cheng, L. Sysoeva, H. Wang, H. Yuan, T. Zhang, X. Meng, Evolution of cooperation in spatio-temporal evolutionary games with public goods feedback, Bull. Math. Biol., 86 (2024), 67. https://doi.org/10.1007/s11538-024-01296-y doi: 10.1007/s11538-024-01296-y
|
| [41] |
W. Wang, M. Zhou, X. Fan, T. Zhang, Global dynamics of a nonlocal PDE model for Lassa haemorrhagic fever transmission with periodic delays, Comp. Appl. Math., 43 (2024), 140. https://doi.org/10.1007/s40314-024-02662-1 doi: 10.1007/s40314-024-02662-1
|
| [42] | W. Wang, X. Wang, X. Fan, Threshold dynamics of a reaction-advection-diffusion waterborne disease model with seasonality and human behavior change, Int. J. Biomath., 2024. https://doi.org/10.1142/S1793524523501061 |

Figures(12) / Tables(1)

Haowen Gong, Huijun Xiang, Yifei Wang, Huaijin Gao, Xinzhu Meng. Strategy evolution of a novel cooperative game model induced by reward feedback and a time delay[J]. AIMS Mathematics, 2024, 9(11): 33161-33184. doi: 10.3934/math.20241583







 DownLoad:
DownLoad: