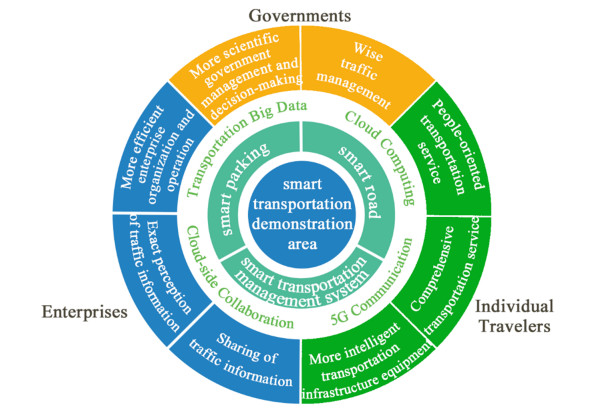
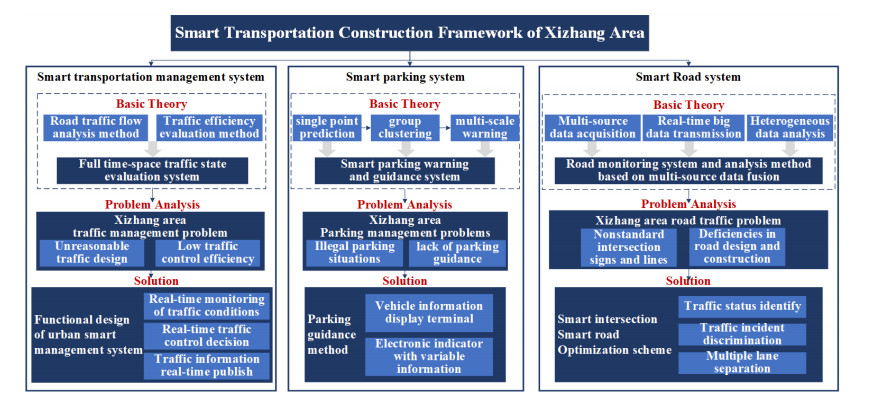
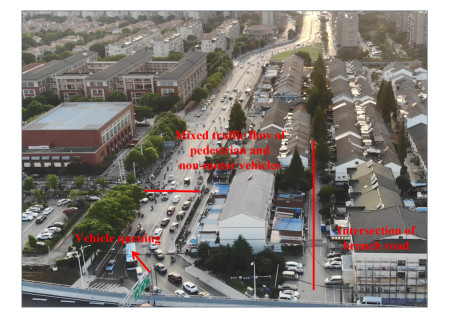
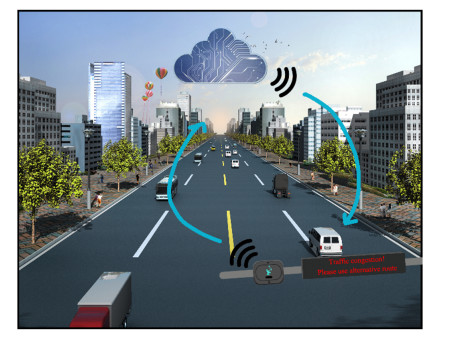
Considering the wide applications of big data in transportation, machine learning and mobile internet technology, artificial intelligence (AI) has largely empowered transportation systems. Many traditional transportation planning and management methods have been improved or replaced with smart transportation systems. Hence, considering the challenges posed by the rising demand for parking spaces, traffic flow and real-time operational management in urban areas, adopting artificial intelligence technologies is crucial. This study aimed to establish a systematic framework for representative transportation scenarios and design practical application schemes. This study begins by reviewing the development history of smart parking systems, roads and transportation management systems. Then, examples of their typical application scenarios are presented. Second, we identified several traffic problems and proposed solutions in terms of a single parking station, routes and traffic networks for an entire area based on a case study of a smart transportation systematic framework in the Xizhang District of Wuxi City. Then, we proposed a smart transportation system based on smart parking, roads and transportation management in urban areas. Finally, by analyzing these application scenarios, we analyzed and predicted the development directions of smart transportation in the fields of smart parking, roads and transportation management systems.
Citation: Kai Huang, Chang Jiang, Pei Li, Ali Shan, Jian Wan, Wenhu Qin. A systematic framework for urban smart transportation towards traffic management and parking[J]. Electronic Research Archive, 2022, 30(11): 4191-4208. doi: 10.3934/era.2022212
Considering the wide applications of big data in transportation, machine learning and mobile internet technology, artificial intelligence (AI) has largely empowered transportation systems. Many traditional transportation planning and management methods have been improved or replaced with smart transportation systems. Hence, considering the challenges posed by the rising demand for parking spaces, traffic flow and real-time operational management in urban areas, adopting artificial intelligence technologies is crucial. This study aimed to establish a systematic framework for representative transportation scenarios and design practical application schemes. This study begins by reviewing the development history of smart parking systems, roads and transportation management systems. Then, examples of their typical application scenarios are presented. Second, we identified several traffic problems and proposed solutions in terms of a single parking station, routes and traffic networks for an entire area based on a case study of a smart transportation systematic framework in the Xizhang District of Wuxi City. Then, we proposed a smart transportation system based on smart parking, roads and transportation management in urban areas. Finally, by analyzing these application scenarios, we analyzed and predicted the development directions of smart transportation in the fields of smart parking, roads and transportation management systems.

| [1] |
A. Ganin, A. Mersky, A. Jin, M. Kitsak, J. Keisler, I. Linkov, Resilience in intelligent transportation systems (ITS), Transp. Res. Part C Emerging Technol., 100 (2019), 318–329. https://doi.org/10.1016/j.trc.2019.01.014 doi: 10.1016/j.trc.2019.01.014

|
| [2] |
K. Huang, K. Kockelman, K. Gurumurthy, Innovations impacting the future of transportation: an overview of connected, automated, shared, and electric technologies, Transp. Lett., 2022 (2022), 1–20. https://doi.org/10.1080/19427867.2022.2070091 doi: 10.1080/19427867.2022.2070091
|
| [3] |
Q. Cheng, Y. Chen, Z. Liu, A bi-level programming model for the optimal lane reservation problem, Expert Syst. Appl., 189 (2022), 116147. https://doi.org/10.1016/j.eswa.2021.116147 doi: 10.1016/j.eswa.2021.116147
|
| [4] |
S. H. Chung, Applications of smart technologies in logistics and transport: A review, Transp. Res. Part E Logist. Transp. Rev., 153 (2021), 102455. https://doi.org/10.1016/j.tre.2021.102455 doi: 10.1016/j.tre.2021.102455
|
| [5] |
Y. Liu, F. Wu, C. Lyu, S. Li, J. Ye, X. Qu, Deep dispatching: A deep reinforcement learning approach for vehicle dispatching on online ride-hailing platform, Transp. Res. Part E Logist. Transp. Rev., 161 (2022), 102694. https://doi.org/10.1016/j.tre.2022.102694 doi: 10.1016/j.tre.2022.102694
|
| [6] |
R. Abbasi, A. Bashir, H. Alyamani, F. Amin, J. Doh, J. Chen, Lidar point cloud compression, processing and learning for autonomous driving, IEEE Trans. Intell. Transp. Syst., 2022 (2022), 1–18. https://doi.org/10.1109/TITS.2022.3167957 doi: 10.1109/TITS.2022.3167957
|
| [7] |
J. Liu, X. Zhou, Observability quantification of public transportation systems with heterogeneous data sources: An information-space projection approach based on discretized space-time network flow models, Transp. Res. Part B Methodol., 128 (2019), 302–323. https://doi.org/10.1016/j.trb.2019.08.011 doi: 10.1016/j.trb.2019.08.011
|
| [8] |
W. Tu, F. Xiao, L. Li, L. Fu, Estimating traffic flow states with smart phone sensor data, Transp. Res. Part C., 126 (2021), 103062. https://doi.org/10.1016/j.trc.2021.103062 doi: 10.1016/j.trc.2021.103062
|
| [9] |
X. Xie, Z. J. Wang, SIV-DSS: Smart In-Vehicle Decision Support System for driving at signalized intersections with V2I communication, Transp. Res. Part C Emerging Technol., 90 (2018), 181–197. https://doi.org/10.1016/j.trc.2018.03.008 doi: 10.1016/j.trc.2018.03.008
|
| [10] |
D. Huang, J. Xing, Z. Liu, Q. An, A multi-stage stochastic optimization approach to the stop-skipping and bus lane reservation schemes, Transportmetrica A. Transp. Sci., 17 (2021), 1272–1304. https://doi.org/10.1080/23249935.2020.1858206 doi: 10.1080/23249935.2020.1858206
|
| [11] |
Y. Liu, C. Lyu, Y. Zhang, Z. Liu, W. Yu, X. Qu, DeepTSP: Deep traffic state prediction model based on large-scale empirical data, Commun. Transp. Res., 1 (2021), 100012. https://doi.org/10.1016/j.commtr.2021.100012 doi: 10.1016/j.commtr.2021.100012
|
| [12] |
S. Li, Y. Liu, X. Qu, Model controlled prediction: a reciprocal alternative of model predictive control, IEEE/CAA J. Autom. Sin., 9 (2022), 1107–1110. https://doi.org/10.1109/JAS.2022.105611 doi: 10.1109/JAS.2022.105611
|
| [13] | Y. Deng, C. Li, Y. Liu, Research of smart transportation system in urban areas, City, 11 (2015), 6. |
| [14] |
M. Amirgholy, M. Nourinejad, H. Gao, Optimal traffic control at smart intersections: Automated network fundamental diagram, Transp. Res. Part B Methodol., 137 (2020), 2–18. https://doi.org/10.1016/j.trb.2019.10.001 doi: 10.1016/j.trb.2019.10.001
|
| [15] | H. Wu, Q. Ye, Y. Zhang, C. Wu, F. Wu, Study on the development direction of intelligent transportation system of Foshan city under big data background, ITSAC 2020, 2020 (2020), 624–631. |
| [16] |
D. Huang, S. Wang, A two-stage stochastic programming model of coordinated electric bus charging scheduling for a hybrid charging scheme, Multimodal Transp., 1 (2022), 100006. https://doi.org/10.1016/j.multra.2022.100006 doi: 10.1016/j.multra.2022.100006
|
| [17] |
J. Qiu, K. Huang, J. Hawkins, The taxi sharing practices: Matching, routing and pricing methods, Multimodal Transp., 1 (2022), 100003. https://doi.org/10.1016/j.multra.2022.100003 doi: 10.1016/j.multra.2022.100003
|
| [18] | T. Sun, The experience and illumination of planning and construction of lle-de-france smart region, Planners, 37 (2021), 81–86. |
| [19] | Y. Zhang, W. Zhang, Applications of smart transportation to promote city management. AI-View, 5 (2021), 94–101. |
| [20] |
Q. Cheng, Z. Liu, J. Guo, X. Wu, R. Pendyala, B. Belezamo, et al., Estimating key traffic state parameters through parsimonious spatial queue models. Transp. Res. Part C Emerging Technol., 137 (2022), 103596. https://doi.org/10.1016/j.trc.2022.103596 doi: 10.1016/j.trc.2022.103596
|
| [21] | B. Xue, Y. Shi, The planning research and design of Beijing urban sub-center smart transportation management system, J. Transp. Eng., 18 (2018), 1–7. |
| [22] | X. Li, Y. Xu, L Huang, Research on status and countermeasures of urban intelligent transportation management in big data era. Intell. City, 6 (2020), 10–13. |
| [23] |
D. Huang, Y. Wang, S. Jia, Z. Liu, S. Wang, A Lagrangian relaxation approach for the electric bus charging scheduling optimization problem, Transportmetrica A: Transp. Sci., 2022 (2022). https://doi.org/10.1080/23249935.2021.2023690 doi: 10.1080/23249935.2021.2023690
|
| [24] |
C. Zhang, G. Li, F. Gao, C. Shi, S. Zhu, The study of s city smart parking mode baded on intenert plus, Bull. Surv. Mapp., 11 (2017), 58–63. https://doi.org/10.1080/23249935.2021.202369010.13474/J.CNKI.11-2246.2017.0348 doi: 10.1080/23249935.2021.202369010.13474/J.CNKI.11-2246.2017.0348
|
| [25] | X. Zhang, Y. Shao, C. Sun, Smart mobility over the future city, Urban Transport China, 16 (2018), 1–7. |
| [26] | C. Wang, H. Qiu, J. Yuan, A. Fang, Y Zhao, Theory and Application of Intelligent Transportation System, Chinese people's Public Security University Press, 2015. |
| [27] | C. Wei, The status and development trend analysis of intelligent traffic management system, Police Sci. Res., 6 (2018), 111–114. |
| [28] |
Z. Gu, A. Najmi, M. Saberi, W. Liu, T. H. Rashidi, Macroscopic parking dynamics modeling and optimal real-time pricing considering cruising-for-parking, Transp. Res. Part C Emerging Technol., 118 (2020). https://doi.org/10.1016/j.trc.2020.102714 doi: 10.1016/j.trc.2020.102714
|
| [29] |
A. Fahim, M. Hasan, M. A. Chowdhury, Smart parking systems: comprehensive review based on various aspects, Heliyon, 7 (2021), e07050. https://doi.org/10.1016/j.heliyon.2021.e07050 doi: 10.1016/j.heliyon.2021.e07050
|
| [30] |
B. Chi, Design of intelligent transportation automation operation and maintenance system based on big data analysis, Autom. Instrum., 3 (2022), 68–72. https://doi.org/10.14016/j.cnki.1001-9227.2022.03.068 doi: 10.14016/j.cnki.1001-9227.2022.03.068
|
| [31] |
D. Han, Traffic planning of CBD under the concept of park city: Taking Chengdu Tianfu center as an example, Commun. Ship., 7 (2020), 45–53. https://doi.org/10.16487/j.cnki.issn2095-7491.2020.06.009 doi: 10.16487/j.cnki.issn2095-7491.2020.06.009
|
| [32] | J. Hu, Exploration and application of smart transportation in smart city, Traffic Transp., 33 (2020), 190–193. |
| [33] |
W. Ke, Problems and solutions of smart transportation development in Quanzhou, TranspoWorld, 34 (2021), 8–9. https://doi.org/10.16248/j.cnki.11-3723/u.2021.34.066 doi: 10.16248/j.cnki.11-3723/u.2021.34.066
|
| [34] |
L. Kong, T. Zhou, L. Zhu, Smart transportation development based on 5G technology, China Telecommun. Trade, 1 (2022), 28–31. https://doi.org/10.3969/j.issn.1671-3060.2022.01.008 doi: 10.3969/j.issn.1671-3060.2022.01.008
|
| [35] |
X. Li, Construction research and application practice of 3D high precision map-Take 5G+intelligent transportation field as an example, Mod. Inf. Technol., 6 (2021), 57–61. https://doi.org/10.19850/j.cnki.2096-4706.2021.06.015 doi: 10.19850/j.cnki.2096-4706.2021.06.015
|
| [36] |
X. Liu, Z. He, Development and tendency of intelligent transportation systems in China, Autom. Panorama, 1 (2015), 58–60. https://doi.org/10.3969/j.issn.1003-0492.2015.01.042 doi: 10.3969/j.issn.1003-0492.2015.01.042
|
| [37] |
L. Shi, Smart city theory and its function and significance of Chinese urban development, Forum Sci. Technol. China., 05 (2011), 97–102. https://doi.org/10.13580/j.cnki.fstc.2011.05.017 doi: 10.13580/j.cnki.fstc.2011.05.017
|
| [38] | B. Wang, Research on Problems and Countermeasures in the Construction of Smart City in Lianyungang, MA.Eng thesis, China University of Mining and Technology, 2021. https://doi.org/10.27623/d.cnki.gzkyu.2021.003170 |
| [39] |
B. Wang, W. Guo, Exploration of the low-carbon development path of cities in the road of urbanization-experience and inspiration of low-carbon cities, Prod. Res., 12 (2021), 1–7. https://doi.org/10.19374/j.cnki.14-1145/f.2021.12.001 doi: 10.19374/j.cnki.14-1145/f.2021.12.001
|
| [40] | Z. Wang, Communicative triple-dimensional construction of smart city, J. Wuhan Univ. Technol., 33 (2020), 50–56. |
| [41] |
H. Xu, J. Yan, Y. Yu, Smart TOD management platform construction study based on BIM, Intell. City, 7 (2021), 33–35. https://doi.org/10.19301/j.cnki.zncs.2021.04.015 doi: 10.19301/j.cnki.zncs.2021.04.015
|
| [42] |
X. Yan, R. Chu, Status Quo, Challenges and perspectives of intelligent transportation development, Transport Res., 7 (2021), 11. https://doi.org/10.16503/j.cnki.20959931.2021.06.001 doi: 10.16503/j.cnki.20959931.2021.06.001
|
| [43] |
Y. Yuan, Y. Zhang, T. Wei, M. Yang, Q. Tan, Review of key technologies and applications in intelligent transportation, Appl. Electr. Tech., 41 (2015), 9–12. https://doi.org/10.16157/j.issn.0258-7998.2015.08.002 doi: 10.16157/j.issn.0258-7998.2015.08.002
|
| [44] | Z. Yu, Planning, Construction and Application of NB-Iot, MA.Eng thesis, Nanjing University of Posts and Telecommunications, 2019. https://doi.org/10.27251/d.cnki.gnjdc.2019.001407 |
| [45] | D. Zhang, J. Ma, X. Zhou, Smart transportation system design based on IoT big data, China Plant Eng., 2 (2019), 158–159. |
| [46] |
X. Zhang, H. Sang, Z. Wei, R. Lu, The exploration of smart transportation development path in small and medium-sized cities-based on Pingdu of Shandong Province, ITSAC 2020, 2020 (2020), 711–724. https://doi.org/10.26914/c.cnkihy.2020.028434 doi: 10.26914/c.cnkihy.2020.028434
|
| [47] | F. Zhen, X. Qin, The applications of big data in smart city research and planning, Urban Plann. Int., 29 (2014), 44–50. |
| [48] |
Y. Zhong, Development direction of smart transportation in Guiyang, TranspoWorld, 18 (2021), 8–9. https://doi.org/10.16248/j.cnki.11-3723/u.2021.18.004 doi: 10.16248/j.cnki.11-3723/u.2021.18.004
|
| [49] | H. Zhu, Development of smart transportation in Shanghai, Shanghai Informatization, 1 (2016), 34–37. |
| [50] |
Y. Zou, X. Ding, Q. Wang, Key technologies and applications prospect for NB-IoT, ZTE Technol. J., 23 (2017), 43–46. https://doi.org/10.3969/j.issn.1009-6868.2017.01.010 doi: 10.3969/j.issn.1009-6868.2017.01.010
|
| [51] |
Z. Cui, R. Ke, Z. Pu, X. Ma, Y. Wang, Learning traffic as a graph: A gated graph wavelet recurrent neural network for network-scale traffic prediction, Transp. Res. Part C Emerging Technol., 115 (2020), 102620. https://doi.org/10.1016/j.trc.2020.102620 doi: 10.1016/j.trc.2020.102620
|
| [52] |
R. Ke, Y. Zhuang, Z. Pu, Y. Wang, A smart, efficient, and reliable parking surveillance system with edge artificial intelligence on IoT devices, IEEE Trans. Intell. Transp. Syst., 22 (2020), 4962–4974. https://doi.org/10.1109/TITS.2020.2984197 doi: 10.1109/TITS.2020.2984197
|
| [53] |
Z. Gu, F. Safarighouzhdi, M. Saberi, T. H. Rashidi, A macro-micro approach to modeling parking, Transp. Res. Part B Methodol., 147 (2021), 220–244. https://doi.org/10.1016/j.trb.2021.03.012 doi: 10.1016/j.trb.2021.03.012
|
| [54] |
Q. Cheng, Z. Liu, Y. Lin, X. S. Zhou, An s-shaped three-parameter (S3) traffic stream model with consistent car following relationship, Transp. Res. Part B Methodol., 153 (2021), 246–271. https://doi.org/10.1016/j.trb.2021.09.004 doi: 10.1016/j.trb.2021.09.004
|
| [55] |
N. Kumar, S. Mittal, V. Garg, N. Kumar, Deep reinforcement learning-based traffic light scheduling framework for sdn-enabled smart transportation system, IEEE Trans. Intell. Transp. Syst., 23 (2021), 2411–2421. https://doi.org/10.1109/TITS.2021.3095161 doi: 10.1109/TITS.2021.3095161
|




Figures(12) / Tables(1)
Kai Huang, Chang Jiang, Pei Li, Ali Shan, Jian Wan, Wenhu Qin. A systematic framework for urban smart transportation towards traffic management and parking[J]. Electronic Research Archive, 2022, 30(11): 4191-4208. doi: 10.3934/era.2022212







 DownLoad:
DownLoad: