Citation: Enrico Bertino, Régis Duvigneau, Paola Goatin. Uncertainty quantification in a macroscopic traffic flow model calibrated on GPS data[J]. Mathematical Biosciences and Engineering, 2020, 17(2): 1511-1533. doi: 10.3934/mbe.2020078

| [1] | M. Treiber, A. Kesting. Traffic flow dynamics, Springer, Heidelberg, 2013. Data, models and simulation, Translated by Treiber and Christian Thiemann. |
| [2] | D. B. Work, S. Blandin, O.-P. Tossavainen, B. Piccoli, A. M. Bayen, A traffic model for velocity data assimilation, Appl. Math. Res. Express. AMRX, 2010 (2010), 1-35. |
| [3] | M. J. Lighthill, G. B. Whitham, On kinematic waves II. A theory of traffic flow on long crowded roads, P. Roy. Soc. Lond. A Mat., 229 (1955), 317-345. |
| [4] | P. I. Richards, Shock waves on the highway, Oper. Res., 4 (1956), 42-51. |
| [5] | R. Boel, L. Mihaylova, A compositional stochastic model for real time freeway traffic simulation, Transport. Res. B-Meth., 40 (2006), 319-334. |
| [6] | K.-C. Chu, L. Yang, R. Saigal, K. Saitou, Validation of stochastic traffic flow model with microscopic traffic simulation, In 2011 IEEE Int. Conference Autom. Sci. Eng., pages 672-677. IEEE, 2011. |
| [7] | S. E. Jabari, H. X. Liu, A stochastic model of traffic flow: Theoretical foundations, Transport. Res. B-Meth., 46 (2012), 156-174. |
| [8] | J. Li, Q.-Y. Chen, H. Wang, D. Ni, Analysis of LWR model with fundamental diagram subject to uncertainties, Transportmetrica, 8 (2012), 387-405. |
| [9] | V. Schleper, A hybrid model for traffic flow and crowd dynamics with random individual properties, Math. Biosci. Eng., 12 (2015), 393-413. |
| [10] | A. Sumalee, R. Zhong, T. Pan, W. Szeto, Stochastic cell transmission model (SCTM): A stochastic dynamic traffic model for traffic state surveillance and assignment, Transport. Res. B-Meth., 45 (2011), 507-533. |
| [11] | H. Wang, D. Ni, Q.-Y. Chen, J. Li, Stochastic modeling of the equilibrium speed-density relationship, J. Adv. Transp., 47 (2013), 126-150. |
| [12] | S. Mishra, N. H. Risebro, C. Schwab, S. Tokareva, Numerical solution of scalar conservation laws with random flux functions, SIAM/ASA J. Uncertain. Quantif., 4 (2016), 552-591. |
| [13] | S. Mishra, C. Schwab, Sparse tensor multi-level Monte Carlo finite volume methods for hyperbolic conservation laws with random initial data, Math. Comp., 81 (2012), 1979-2018. |
| [14] | S. Tokareva, Stochastic finite volume methods for computational uncertainty quantification in hyperbolic conservation laws, ETH Zurich, 2013. |
| [15] | G. Poëtte, B. Després, D. Lucor, Uncertainty quantification for systems of conservation laws, J. Comput. Phys., 228 (2009), 2443-2467. |
| [16] | R. Abgrall, P. M. Congedo, A semi-intrusive deterministic approach to uncertainty quantification in non-linear fluid flow problems, J. Comput. Phys., 235 (2013), 828-845. |
| [17] | Autoroutes Trafic, accessed: 2019-07-28. Available from: http://www.autoroutes-trafic.fr/. |
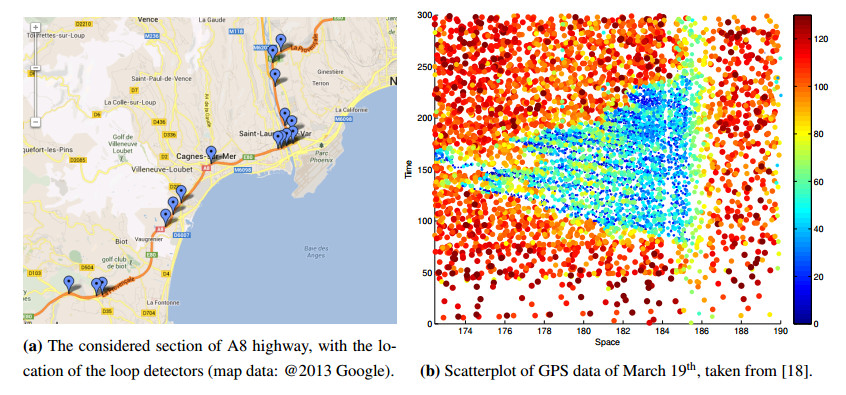
| [18] | A. Cabassi, P. Goatin, Validation of traffic flow models on processed GPS data, Research Report RR-8382, INRIA, 2013. |
| [19] | Escota (VINCI Autoroutes), accessed: 2019-07-28. Available from: https://corporate.vinci-autoroutes.com/fr/presentation/societes-vinci-autoroutes/escota/en-bref. |
| [20] | C. F. Daganzo, The cell transmission model: A dynamic representation of highway traffic consistent with the hydrodynamic theory, Transport. Res. B-Meth., 28 (1994), 269-287. |
| [21] | G. F. Newell, A simplified theory of kinematic waves in highway traffic, part II: Queueing at freeway bottlenecks, Transport. Res. B-Meth., 27 (1993), 289-303. |
| [22] | S. K. Godunov, A difference method for numerical calculation of discontinuous solutions of the equations of hydrodynamics, Mat. Sb. (N.S.), 47 (1959), 271-306. |
| [23] | M. Garavello, B. Piccoli, Traffic flow on networks, volume 1 of AIMS Series on Applied Mathematics, American Institute of Mathematical Sciences (AIMS), Springfield, MO, 2006. Conservation laws models. |
| [24] | J.-P. Lebacque, The Godunov scheme and what it means for first order traffic flow models, In Transportation and traffic theory. Proceedings of the 13th international symposium on transportation and traffic theory, Lyon, France, 24-26 JULY 1996, 1996. |
| [25] | J. K. Wiens, J. M. Stockie, J. F. Williams, Riemann solver for a kinematic wave traffic model with discontinuous flux, J. Comput. Phys., 242 (2013), 1-23. |
| [26] | J. Tryoen, O. Le Maître, A. Ern, Adaptive anisotropic spectral stochastic methods for uncertain scalar conservation laws, SIAM J. Sci. Comput., 34 (2012), A2459-A2481. |
| [27] | M. Bulíček, P. Gwiazda, J. Málek, A. Świerczewska-Gwiazda, On scalar hyperbolic conservation laws with a discontinuous flux, Math. Models Methods Appl. Sci., 21 (2011), 89-113. |
| [28] | J. a.-P. Dias, M. Figueira, J.-F. Rodrigues. Solutions to a scalar discontinuous conservation law in a limit case of phase transitions, J. Math. Fluid Mech., 7 (2005), 153-163. |
| [29] | T. Gimse, Conservation laws with discontinuous flux functions, SIAM J. Math. Anal., 24 (1993), 279-289. |
| [30] | E. Cristiani, C. de Fabritiis, B. Piccoli, A fluid dynamic approach for traffic forecast from mobile sensor data, Commun. Appl. Ind. Math., 1 (2010), 54-71. |
Figures(18) / Tables(2)

Enrico Bertino, Régis Duvigneau, Paola Goatin. Uncertainty quantification in a macroscopic traffic flow model calibrated on GPS data[J]. Mathematical Biosciences and Engineering, 2020, 17(2): 1511-1533. doi: 10.3934/mbe.2020078







 DownLoad:
DownLoad: