The continuous growth of STEM (Science, Technology, Engineering and Mathematics) education has set intense pressure on well-established engineering subjects, with a trend of replacing them with less demanding theoretical contents. This paper describes a recent activity with bachelor students to stimulate STEM education via a Robot-Sumo Competition. Students are grouped in teams to design, build and program their robot sumo robots. This course was implemented for the first time at University of Calabria (UNICAL). As a first attempt has been made with six teams each made of six students. Some seminars are delivered to the students to let them understand the assignment and its basic requirements. Then, they are expected to start developing a concept design and competition strategy. Then, they work on a 3D CAD modelling to design their own robot, whose main components will be later 3D printed and assembled. In parallel, the team selects the required sensors and electronic components as based on an Arduino architecture. The robots are completed and programmed for the competition where teams fight to find the most competitive solutions. The competition proves to be highly effective to learn multiple skills with a very practical and stimulating approach.
Citation: Giuseppe Carbone, Elio Matteo Curcio, Stefano Rodinò, Francesco Lago. A Robot-Sumo student competition at UNICAL as a learning-by-doing strategy for STEM education[J]. STEM Education, 2022, 2(3): 262-274. doi: 10.3934/steme.2022016
The continuous growth of STEM (Science, Technology, Engineering and Mathematics) education has set intense pressure on well-established engineering subjects, with a trend of replacing them with less demanding theoretical contents. This paper describes a recent activity with bachelor students to stimulate STEM education via a Robot-Sumo Competition. Students are grouped in teams to design, build and program their robot sumo robots. This course was implemented for the first time at University of Calabria (UNICAL). As a first attempt has been made with six teams each made of six students. Some seminars are delivered to the students to let them understand the assignment and its basic requirements. Then, they are expected to start developing a concept design and competition strategy. Then, they work on a 3D CAD modelling to design their own robot, whose main components will be later 3D printed and assembled. In parallel, the team selects the required sensors and electronic components as based on an Arduino architecture. The robots are completed and programmed for the competition where teams fight to find the most competitive solutions. The competition proves to be highly effective to learn multiple skills with a very practical and stimulating approach.

| [1] |
Educational Robotics Competitions and Involved Methodological Aspects. Advances in Intelligent Systems and Computing (2019) 1023: 305-312. 
|
| [2] | Daran robot, a reconfigurable, powerful, and affordable robotic platform for STEM education. STEM Education (2021) 1: 299-308. |
| [3] | Board 112: A STEM Training Program to Improve Middle and High School VEX Competition Outcomes. 2019 ASEE Annual Conference & Exposition (2019) . |
| [4] | Student education utilizing the development of autonomous mobile robot for robot competition. Journal of Robotics and Mechatronics (2017) 29: 1025-1036. |
| [5] |
Making robot challenges with virtual robots. Proceedings of the Conference on Integrating Technology into Computer Science Education (2017) 273-278.
|
| [6] |
Nardi, D., Roberts, J., Veloso, M. and Fletcher, L., Robotics competitions and challenges, 2016. https://doi.org/10.1007/978-3-319-32552-1_66 |
| [7] |
Obstacle Avoidance and Navigation Planning of a Wheeled Mobile Robot using Amended Artificial Potential Field Method. Procedia Computer Science (2018) 133: 998-1004.
|
| [8] |
Takaghaj, S.M., MacNab, C. and Friesen, S., Inspiring girls to pursue careers in STEM with a mentor-supported robotics project, 2011. |
| [9] |
Integrating robot design competitions into the curriculum and K-12 outreach activities. FIRA RoboWorld Congress (2009) 44: 271-278.
|
| [10] |
Robotbames webpage, Robot sumo rules. Available from: http://robogames.net/rules/all-sumo.php |


Figures(10) / Tables(2)
Giuseppe Carbone, Elio Matteo Curcio, Stefano Rodinò, Francesco Lago. A Robot-Sumo student competition at UNICAL as a learning-by-doing strategy for STEM education[J]. STEM Education, 2022, 2(3): 262-274. doi: 10.3934/steme.2022016

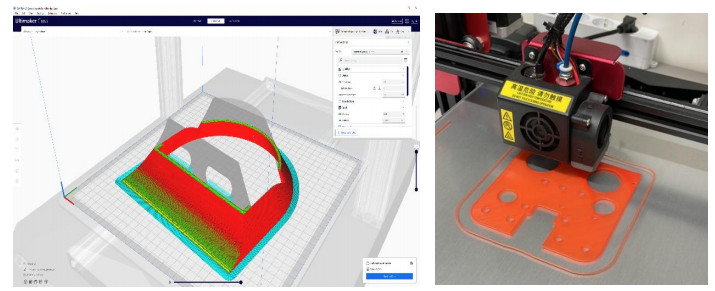
Some pictures taken during the 3D printing classes and practices
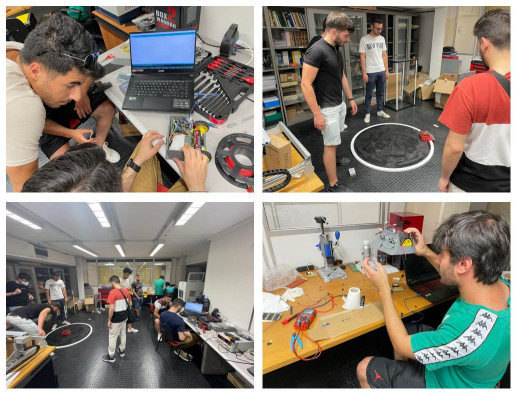
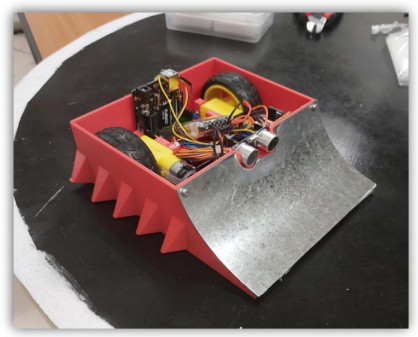
Some pictures taken during the assembly and testing phase of the Sumo Robots
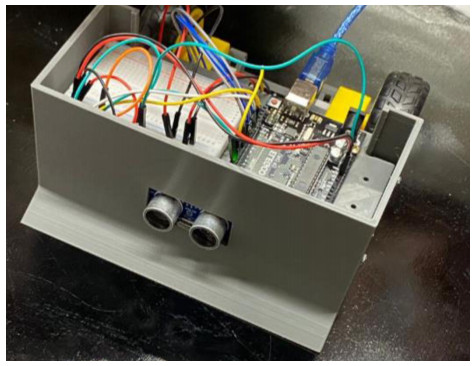
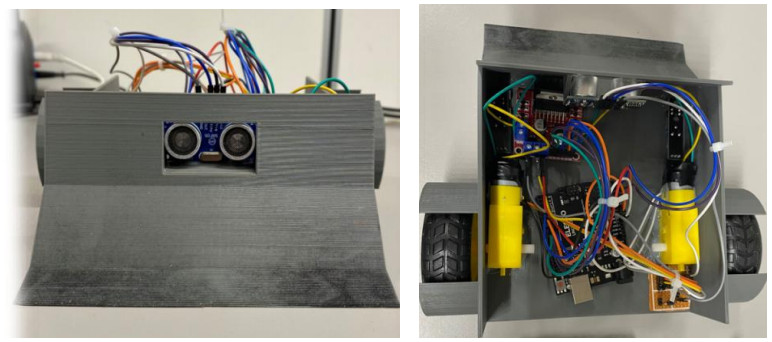
Robot of Team 1, called SQUARE
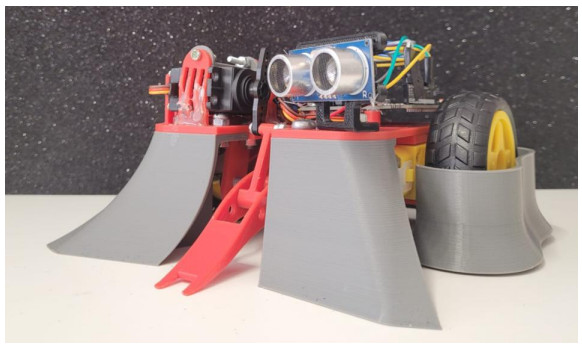
Robot of Team 2, called RHINO
Robot of Team 3, called J3RR1
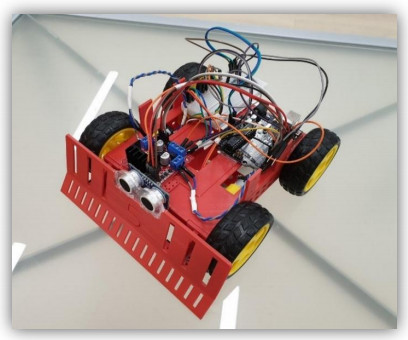
Robot of Team 4, called JACKIE CHAN
Robot of Team 5, called BONAROBOT
Robot of Team 6, called DUNEBUGGY
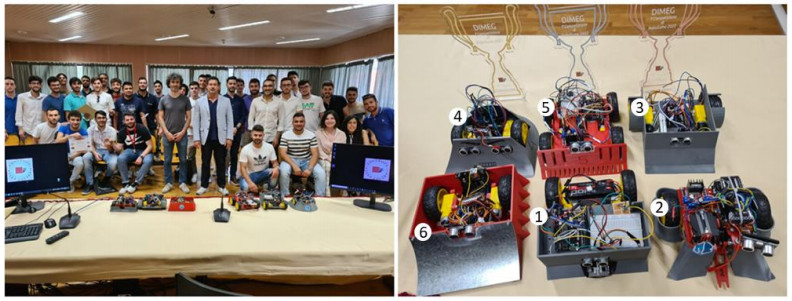
Some photos taken during the competition
Photos taken during the final stage of the awards ceremony. 1: SQUARE, 2: RHINO, 3: J3RR1, 4: JACKIE CHAN, 5: BONAROBOT, 6: DUNEBUGGY






 DownLoad:
DownLoad: