The redesign of national curricula across the Anglophone world since the 1990s is demonstrably shaped by common policy trends. Focusing on the profound and uncritiqued changes that have been implemented in New Zealand education, this paper provides a critical commentary on the characterising features of the current New Zealand mathematics curriculum, describing a context within which mathematics education at schools is severely compromised. Drawing on the evidence available from large-scale international indicators, such as PISA and TIMSS, to benchmark associated curriculum changes implemented by the New Zealand government, we hypothesise that the ongoing decline of student mathematical achievement is the result of four main interdependent features which characterise the New Zealand curriculum. The features are (1) its highly generic non-prescriptive nature, (2) a commitment to teacher autonomy in curriculum knowledge selection, (3) competency-based outcomes approach, and (4) a commitment to localisation in curriculum selection. Recognising socio-political forces and ideological and intellectual ideas associated with those forces, we discuss each characterising feature, in turn, to show how they contribute to and draw from the others to create a 'curriculum without content'. We conclude with explicit recommendations and a call for future studies to establish the extent to which each of these four features contributes to the decline of student achievement.
Citation: Neil Morrow, Elizabeth Rata, Tanya Evans. The New Zealand mathematics curriculum: A critical commentary[J]. STEM Education, 2022, 2(1): 59-72. doi: 10.3934/steme.2022004
The redesign of national curricula across the Anglophone world since the 1990s is demonstrably shaped by common policy trends. Focusing on the profound and uncritiqued changes that have been implemented in New Zealand education, this paper provides a critical commentary on the characterising features of the current New Zealand mathematics curriculum, describing a context within which mathematics education at schools is severely compromised. Drawing on the evidence available from large-scale international indicators, such as PISA and TIMSS, to benchmark associated curriculum changes implemented by the New Zealand government, we hypothesise that the ongoing decline of student mathematical achievement is the result of four main interdependent features which characterise the New Zealand curriculum. The features are (1) its highly generic non-prescriptive nature, (2) a commitment to teacher autonomy in curriculum knowledge selection, (3) competency-based outcomes approach, and (4) a commitment to localisation in curriculum selection. Recognising socio-political forces and ideological and intellectual ideas associated with those forces, we discuss each characterising feature, in turn, to show how they contribute to and draw from the others to create a 'curriculum without content'. We conclude with explicit recommendations and a call for future studies to establish the extent to which each of these four features contributes to the decline of student achievement.

| [1] |
Mullis, I.V.S., et al., TIMSS 2019 International Results in Mathematics and Science, 2020, Boston College, TIMSS & PIRLS International Study Center https://timssandpirls.bc.edu/timss2019/international-results/. |
| [2] |
OECD, PISA 2018 Results: What Students Know and Can Do, PISA, 2019, OECD Publishing, Paris. |
| [3] |
Evans, T. and Martin, G., The Woeful State of Mathematics Education in Aotearoa New Zealand Schools - A generation of New Zealanders has been failed, 2021, NEWSLETTER of the New Zealand Mathematics Society, Number 143, p. 9‒11. |
| [4] |
Hunter, J.J., Mathematics in New Zealand: Past, present and future, Ministry of Research, Science and Technology, 1998, Wellington, N.Z. |
| [5] |
Holton, D., Foreword, Learning Media, 2005, Wellington, p. 1‒4. |
| [6] |
Hughes, P. and Peterson, L., Constructing and using a personal numeracy teaching model in a classroom setting, in Proceedings of the 26th annual conference of the Mathematics Education Research Group of Australasia, 2003: 444‒451. Geelong, Australia: MERGA. |
| [7] |
Thomas, G. and Tagg, A., Evidence for expectations: Findings from the numeracy project longitudinal study, 2005: 21‒34. |
| [8] |
Young-Loveridge, J., A decade of reform in mathematics education: Results for 2009 and earlier years, 2010: 15‒35. |
| [9] |
MoE, The New Zealand curriculum for English-medium teaching and learning in years 1-13, Learning Media, Ministry of Education, 2007, Wellington, N.Z. |
| [10] |
Mullis, I.V.S., et al., TIMSS 2015 International Results in Mathematics, 2016, Boston College, TIMSS & PIRLS International Study Center http://timssandpirls.bc.edu/timss2015/international-results/. |
| [11] |
Mathematics and Statistics in Aotearoa New Zealand: Expert Advisory Panel Report, Royal Society of New Zealand, Wellington, New Zealand, 2021. |
| [12] |
Grønmo, L.S. and Olsen, R.V., TIMSS versus PISA: the case of pure and applied mathematics, in The 2nd IEA International Research Conference. 2006. Washington, D.C., USA. |
| [13] |
MoE, Mathematics in the New Zealand curriculum, Learning Media, Ministry of Education, 1992, Wellington, N.Z. |
| [14] |
Rata, E., The Curriculum Design Coherence Model in the Knowledge‐Rich School Project. Review of Education, 2021. https://doi.org/10.1002/rev3.3254. doi: 10.1002/rev3.3254
|
| [15] |
Ryle, G., The Concept of Mind. 1949: Hutchinson & Co. |
| [16] |
Winch, C., Curriculum Design and Epistemic Ascent. Journal of Philosophy of Education, 2013, 47(1): 128‒146. https://doi.org/10.1111/1467-9752.12006. doi: 10.1111/1467-9752.12006
|
| [17] |
Zame, L., Knowledge in inquiry learning, University of Auckland, 2019. |
| [18] |
Biesta, G.J.J., Giving Teaching Back to Education: Responding to the Disappearance of the Teacher. Phenomenology & Practice, 2013, 6(2): 35‒49. https://doi.org/10.29173/pandpr19860. doi: 10.29173/pandpr19860
|
| [19] |
Rata, E., Ethnic revival, in SAGE Encyclopedia of Political Behavior, F. Moghaddam, Ed. 2017: 265-268. SAGE Publications, Inc. |
| [20] |
MoE, The Local Curriculum. Local Curriculum Guides, Ministry of Education, 2019, Wellington, New Zealand. |
| [21] |
MoE, Mathematics syllabus: Primary one to six, Ministry of Education, 2012, Singapore. |
| [22] |
Soh, C.K., An overview of mathematics education in Singapore, in Mathematics Curriculum in Pacific Rim Countries–China, Japan, Korea and Singapore, 2008: 23‒36. Information Age Publishing. |
| [23] |
Kaur, B., et al., Mathematics Education in Singapore, in The Proceedings of the 12th International Congress on Mathematical Education. 2015: 311‒316. Springer International Publishing. https://doi.org/10.1007/978-3-319-12688-3_21 |
| [24] |
Dindyal, J., The Singaporean mathematics curriculum: Connections to TIMSS, in Identities, cultures and learning spaces: Proceedings of the 29th annual conference of the Mathematics Education Research Group of Australasia, 2006: 179‒186. Pymble, N.S.W.: MERGA. |
| [25] |
MoE, Numeracy project teaching resources. Retrieved from https://nzmaths.co.nz/numeracy-project-teaching-resources, 2021. |
| [26] |
Couch, D., Progressive education in New Zealand from 1937 to 1944: Seven years from idea to orthodoxy. Pacific-Asian Education, 2012, 24(1): 55‒72. |
| [27] |
Young, M., Why educators must differentiate knowledge from experience. Pacific-Asian Education, 2010, 22(1): 9‒10. |
| [28] |
Benade, L., Shaping the Responsible, Successful and Contributing Citizen of the Future: 'Values' in the New Zealand Curriculum and its Challenge to the Development of Ethical Teacher Professionality. Policy Futures in Education, 2011, 9(2): 151‒162. https://doi.org/10.2304/pfie.2011.9.2.151. doi: 10.2304/pfie.2011.9.2.151
|
| [29] |
Korthagen, F., Inconvenient truths about teacher learning: towards professional development 3.0. Teachers and Teaching, 2016: 1‒19. https://doi.org/10.1080/13540602.2016.1211523. doi: 10.1080/13540602.2016.1211523
|
| [30] |
Celedón-Pattichis, S., et al., Asset-Based Approaches to Equitable Mathematics Education Research and Practice. Journal for Research in Mathematics Education, 2018, 49(4): 373‒389. https://doi.org/10.5951/jresematheduc.49.4.0373. doi: 10.5951/jresematheduc.49.4.0373
|
| [31] |
Priestley, M. and Sinnema, C., Downgraded curriculum? An analysis of knowledge in new curricula in Scotland and New Zealand. The Curriculum Journal, 2014, 25(1): 50‒75. https://doi.org/10.1080/09585176.2013.872047. doi: 10.1080/09585176.2013.872047
|
| [32] |
Delors, J., Learning: The treasure within. Report to UNESCO of the international commission on education for the twenty-first century, 1996, Paris: UNESCO. https://doi.org/10.7788/ijbe.1996.24.1.253. |
| [33] |
Gilbert, J., Catching the knowledge wave? The knowledge society and the future of education, NZCER, 2005, Wellington. |
| [34] |
Bolstad, R., et al., Supporting future-oriented learning and teaching – A New Zealand perspective, 2012, Ministry of Education commissioned report from NZCER. https://www.educationcounts.govt.nz/publications/schooling/109306. |
| [35] |
Lourie, M., Recontextualising Twenty-first Century Learning in New Zealand Education Policy: The Reframing of Knowledge, Skills and Competencies. New Zealand Journal of Educational Studies, 2020, 55(1): 113‒128. https://doi.org/10.1007/s40841-020-00158-0. doi: 10.1007/s40841-020-00158-0
|
| [36] |
Geary, D., Principles of evolutionary educational psychology. Learning and Individual Differences, 2002, 12: 317‒345. https://doi.org/10.1016/S1041-6080(02)00046-8 doi: 10.1016/S1041-6080(02)00046-8
|
| [37] |
Geary, D.C. and Berch, D.B., Evolution and Children's Cognitive and Academic Development, in Evolutionary Perspectives on Child Development and Education, D.C. Geary and D.B. Berch, Editors, 2016: 217‒249. Cham: Springer International Publishing. https://doi.org/10.1007/978-3-319-29986-0_9 |
| [38] |
Kirschner, P.A., Sweller, J., and Clark, R.E., Why Minimal Guidance During Instruction Does Not Work: An Analysis of the Failure of Constructivist, Discovery, Problem-Based, Experiential, and Inquiry-Based Teaching. Educational Psychologist, 2006, 41(2): 75‒86. https://doi.org/10.1207/s15326985ep4102_1. doi: 10.1207/s15326985ep4102_1
|
| [39] |
Cuthbert, A.S. and Standish, A., What Should Schools Teach?: Disciplines, subjects and the pursuit of truth. Second edition ed. Knowledge and the curriculum. 2021, UCL Insitute of Education: UCLPRESS. https://doi.org/10.2307/j.ctv14t475s |
| [40] |
Bishop, R. and Glynn, T., Culture Counts: Changing power relations in education. 1999, Palmerston North: Dunmore Press. |
| [41] |
Lynch, C., Teachers' attitudes to Maori educational achievement initiatives, University of Auckland, 2017. |
| [42] |
Collins, S., Child-centred teaching blamed for New Zealand's education decline, 2020. |
| [43] |
Morgan, J., Barrett, B., and Hoadley, U., Knowledge, Curriculum and Equity: Social Realist Perspectives. 1 ed. 2017: Routledge. https://doi.org/10.4324/9781315111360-1 |
| [44] |
Bishop, R., Teaching to the North-East: Relationship-based learning in practice, 2019, Wellington: NZCER. |
| [45] |
Richardson, A., Freedom in a scientific society: reading the context of Reichenbach's contexts, in Revisiting discovery and justification. Archimedes, F. Schickore., Steinle Ed. 2006: 41‒54. Kluwer Academic Publishers. https://doi.org/10.1007/1-4020-4251-5_4 |
| [46] |
Bunge, M., Philosophy of SCIENCE: From Problem to Theory. 1 ed. 1998: Routledge. |
Figures(1)
Neil Morrow, Elizabeth Rata, Tanya Evans. The New Zealand mathematics curriculum: A critical commentary[J]. STEM Education, 2022, 2(1): 59-72. doi: 10.3934/steme.2022004

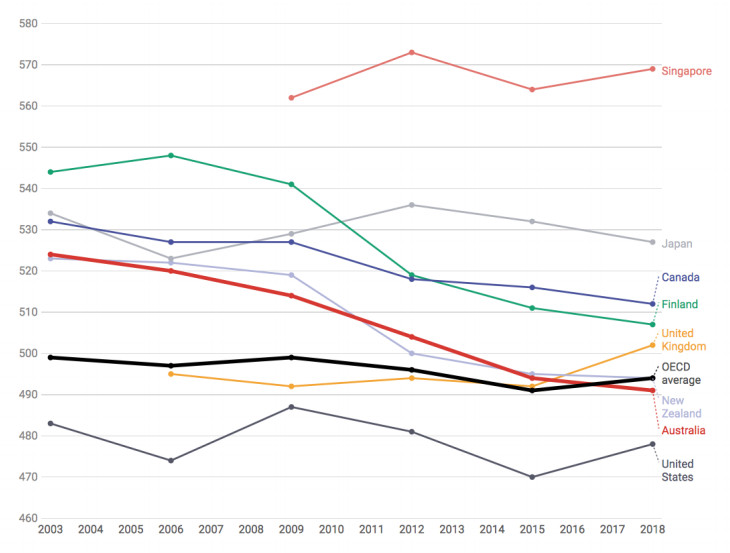
Programme for International Student Assessment (PISA) benchmark indicators (adapted from [11], p. 7)






 DownLoad:
DownLoad: